MBD for ANSYS助力大力钳研发

本文摘要(由AI生成):
大力钳是一种杠杆增力的手动工具,主要用于夹持零件,具有很大的夹紧力。基于MBD for ANSYS,可以方便地建立大力钳数字样机模型,分析大力钳的受力情况,评价其刚强度及耐久寿命。大力钳数字样机模型不仅体现了零件间位置关系,还体现了连接关系,决定运动及载荷的传递模式。建立大力钳数字样机模型需要定义各种连接关系,包括固定、转动副、弹簧作用和接触关系。基于MBD for ANSYS进行大力钳数字样机测试,可以定义测试条件,得到夹持力。
大力钳是属于一种杠杆增力的手动工具,主要是用来夹持零件,常在铆接、焊接及磨削等加工中使用,其特点是钳口可以锁紧并产生很大的夹紧力,使被夹紧零件不会松脱,而且钳口有多档可调,供夹紧不同厚度的零件。人手的握力与手的姿势和持续时间有关(一般人的瞬时最大握力在350N~380N之间,青年男子的瞬时握力在430N~560N之间)。基于MBD for ANSYS,可以非常方便并快速地建立起大力钳的数字样机模型,并能将轻松地改变不同手握力的作用得到钳口的不同夹紧力分布。大力钳在满足其功能的同时,其质量性能也非常关键,MBD for ANSYS还可以分析出在大力钳夹持过程中大力钳各个零件上的受力情况,并智能地将大力钳零件的载荷传递至有限元分析模型上,用于进一步评价大力钳的刚强度及耐久寿命。


基于MBD for ANSYS建立大力钳数字样机
大力钳数字样机与大力钳几何模型的本质区别在于数字样机模型不仅体现了大力钳的零件间位置关系,更体现了组成大力钳的各个零件之间的连接关系,而这种连接关系决定着运动及载荷的传递模式。
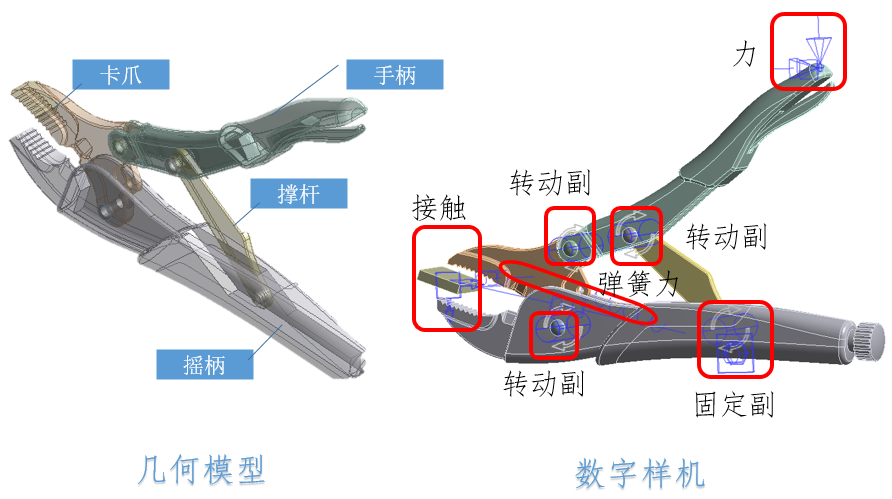
建立大力钳的数字样机模型,首先需要导入大力钳的几何模型。之后,需要根据大力钳的工作原理定义各种连接关系:在大力钳工作过程,手握力使得摇柄与手柄之间相对靠拢,在数字样机模型中,把摇柄视为固定,在手柄上施加力的作用;而撑杆与手柄之间,撑杆与摇柄之间,手柄与卡爪间,以及摇柄与卡爪间,均为转动副;手柄侧的卡爪与摇柄之间有弹簧作用;两个卡爪与被夹持零件之间是接触关系,需要定义2个接触对。这些连接关系的定义一般包含3个方面:在MBD for ANSYS中通过MBD工具栏选择相应关系类型(在Joint/Force/Contact相应下拉框中选择),所选择的连接关系类型在模型树中显示,对于每一连接关系,需要在Detail属性页面定义被连接的对象及连接属性。
基于MBD for ANSYS进行大力钳数字样机“测试”
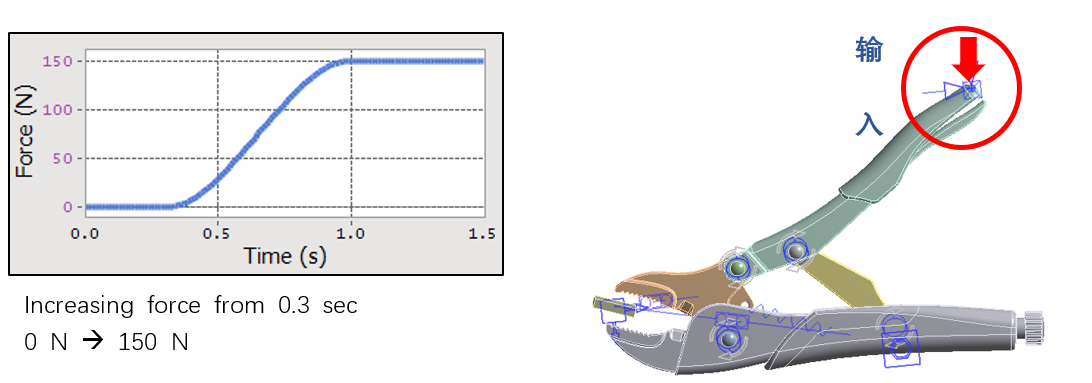
在获得大力钳数字样机之后,需要定义“数字样机测试条件”,在此以使用者轻松操作大力钳为测试条件,即手握力不取最大值,将手握力相应的载荷以150N作为测试输入,在此,将握力作为Step函数,以体现握力的渐变过程。
|
|
|||
|
|
|||
|
|
|||
通过运行运动学/动力学仿真,可以得到夹持力。


