ADAMS板簧悬架的简单仿真过程

板簧悬架的简单建模及仿真
ADAMS中板簧的建立一般可以通过板簧工具插件或通过自建(通过建立离散梁、添加接触力、约束等)的方法建立,本文主要通过板簧插件建立模型。基于板簧插件,板簧选件的建立一般可通过建立初始几何轮廓、创建板簧结构、创建修改连接件、刚度设置、总成装配、仿真等步骤完成。
板簧几何轮廓的建立及创建板簧结构
板簧几何轮廓的建立过程及相关说明已在上篇文章中说明,这里不再赘述。
板簧结构的创建的界面如下图所示(在view模块中建立):
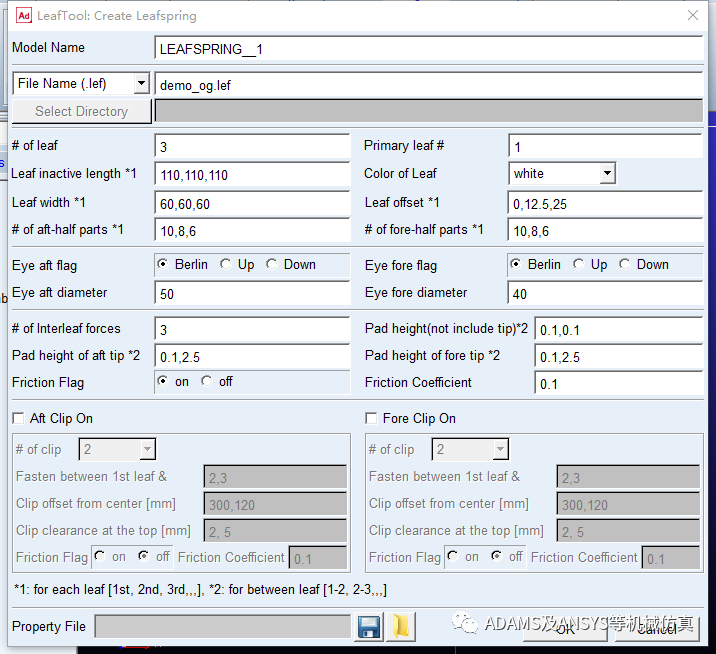
(1)File name:输入板簧的初始轮廓文件,这个文件则是上一步建立的文件,文件内容如下:
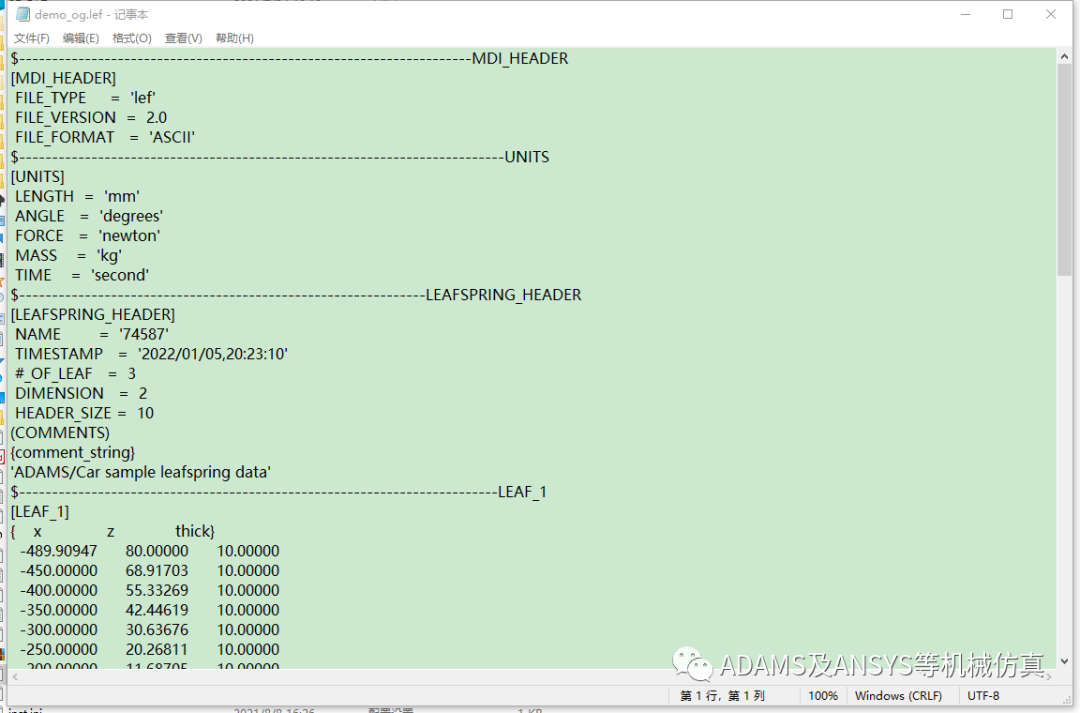
在上图中可以看到板簧轮廓簧片的“坐标值”,这些值是变形后钢板弹簧上表面内侧形状的轮廓。可对这些值进行修改来获得希望得到的板簧轮廓模型。
(2)#of leaf:簧片数;Primary leaf#:主簧
(3)Leaf inactive length*1:各片板簧的安装长度
(4)Leaf width*1:各片板簧宽度;
(5)Leaf offset*1:各片板簧最高点的距离,从而确定板簧间的间隙
(6)#of aft/fore-half parts*1:前后每片板簧离散成构件的数量
(7)#of Interleaf forces:相邻板簧间摩擦力的数量
(8)Pad height of aft/force tip*2:前后端与上片板簧间衬垫高度
(9)Friction coefficient:摩擦系数
(10)Aft Clip On,Fore Clip On:选择是否加弹簧夹,弹簧夹可以避免各簧片分开,以免单独承载,并且防止各片横向窜动。
(12)Clip offset from center[mm]:弹簧夹距上表面中心位置的距离
(13)Clip clearance at the top[mm]:弹簧夹和主片簧上表面之间间隙
2.板簧几何轮廓的建立及创建板簧结构
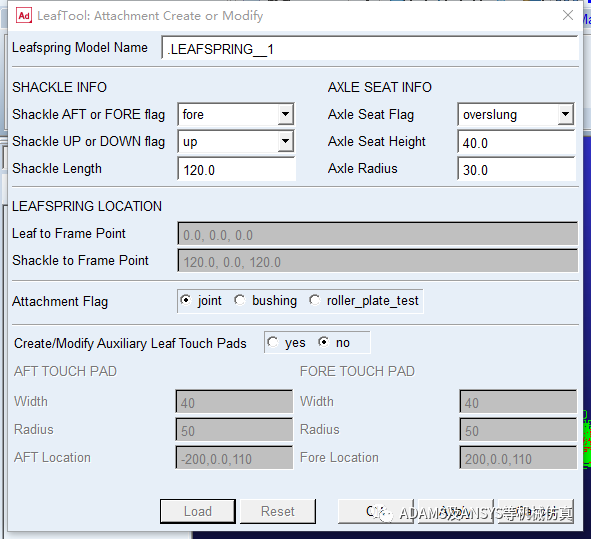
(2)Shackle UP or DOWN flag:吊耳处于压缩或拉伸状态
(3)Shackle Length:吊耳长度;Axle Seat Flag:板簧处于正吊还是反吊
(4)Axle Seat Height:车桥安装高度;Axle Radius:车桥半径
(5)Leaf to Frame Point:板簧卷耳与车架的连接位置
(6)Shackle to Frame Point:板簧吊耳与车架的连接位置(该处不能修改,若要修改,可关闭界面后,点击板簧插件,选择Specify Attachment进行修改)
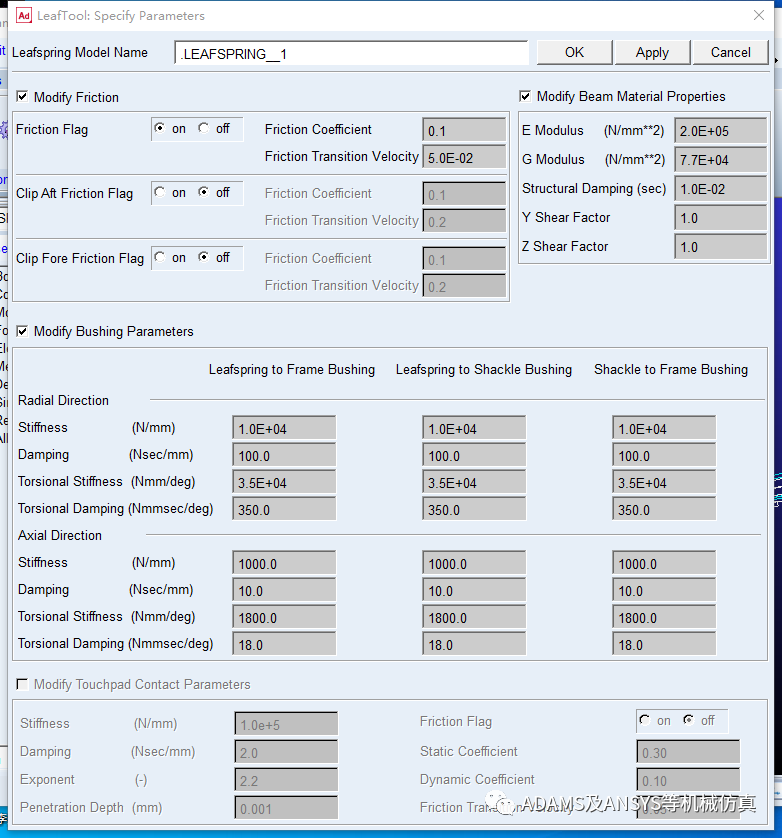
3.修改刚度属性
4.添加预载荷
点击板簧插件中Preloaded Model,出现如下界面:
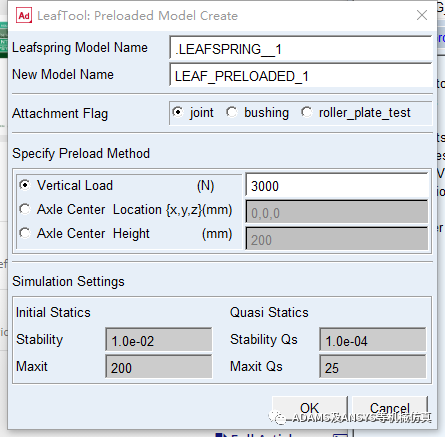
(1)Vertical Load:垂直载荷
(2)Axle Height:车轴距主簧上表面高度方向距离
5.板簧装配
点击板簧插件中的Leafspring Assesmbly,出现如下界面:
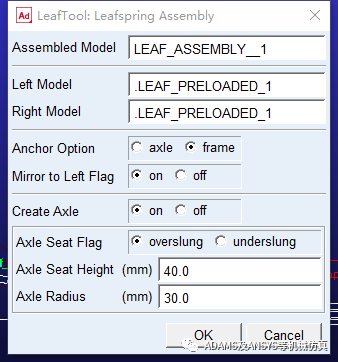
Anchor Option:固定方式,Axle:根据车轴中心和安装高度定位板簧位置;Frame:根据板簧到车架安装点和吊耳到车架安装点的位置来确定板簧位置。建立完成后将文件另存为cmd格式(点击File,选择Export)。
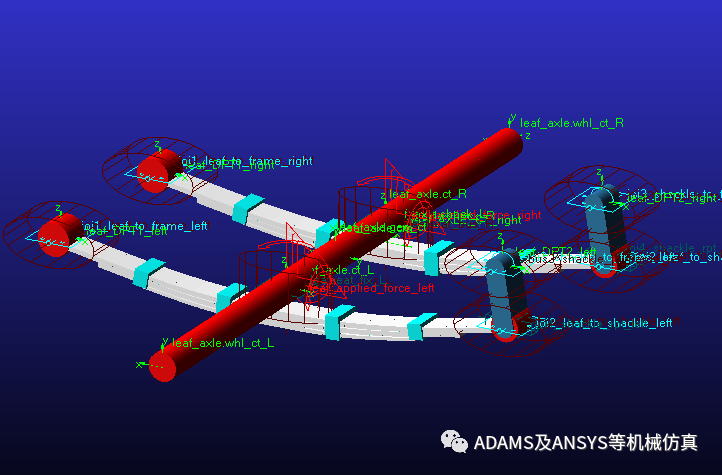
打开ADAMS/car中的Template Builder模式,导入前面建立好的cmd模型,然后点击板簧插件,选择Port ADAMS/car,如下图:
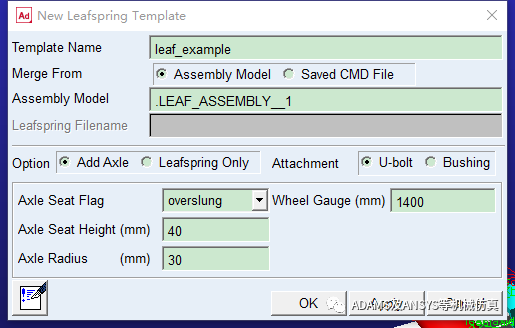
Add Axle:添加驱动轴
Wheel Gauge:轮距;Attachment:(连接方式):U-bolt骑马螺栓,Bushing:衬套
Axle Seat Height:车轴安装高度。
完成设置,点击ok后出现如下界面(完成板簧模板的建立):
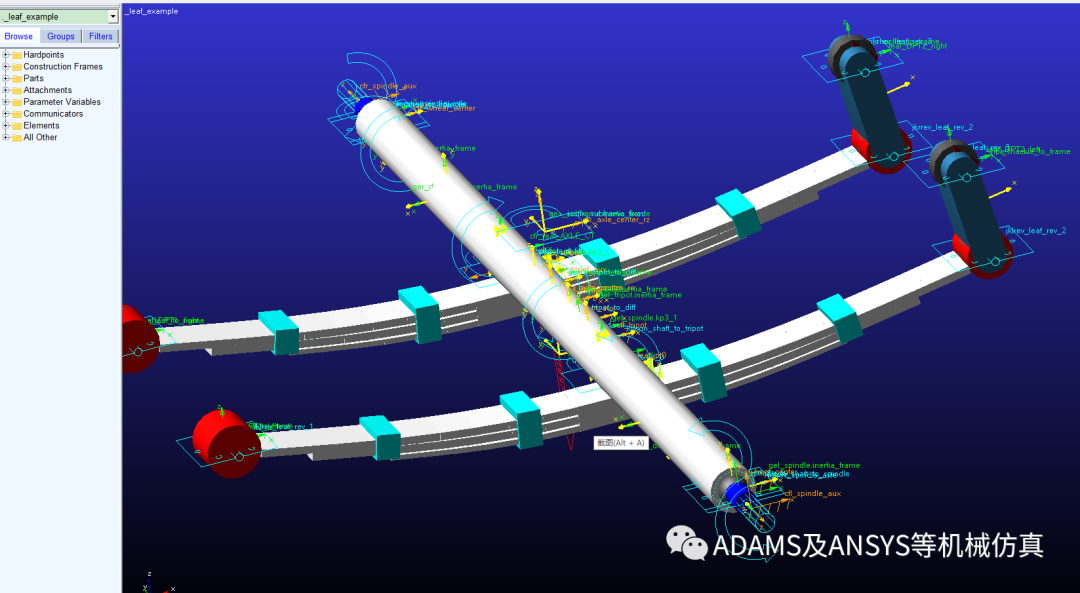
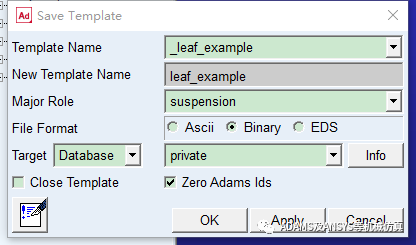
完成后点击file,选择save as 将模板保存到个人文件目录里,如下图:
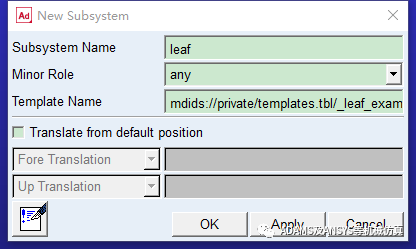
保存后,点击F9,进入Adams/car的标准界面,点击file,选择new,然后选择Suspension,出现如下界面(在Template Name中选择前面建立好的板簧模板文件,然后点击ok,则建立板簧悬架子系统):
将板簧悬架子系统保存后,点击file,选择new,然后选择Suspension Assembly,出现如下界面(建立试验台与悬架的装配):
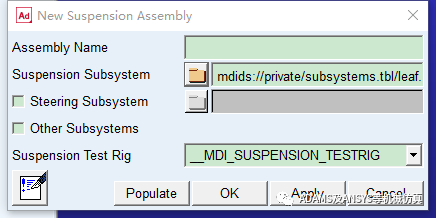
完成后出现如下图所示:
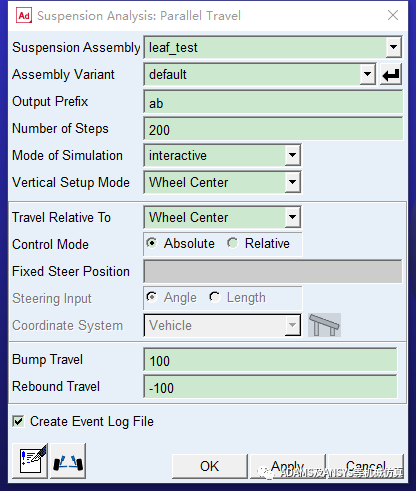
Bump Travel:上跳行程
Rebound Travel:回弹行程
完成设置后点击Ok进行仿真。
仿真动画回放可以点击Review,选择Animation Controls,出现如下:
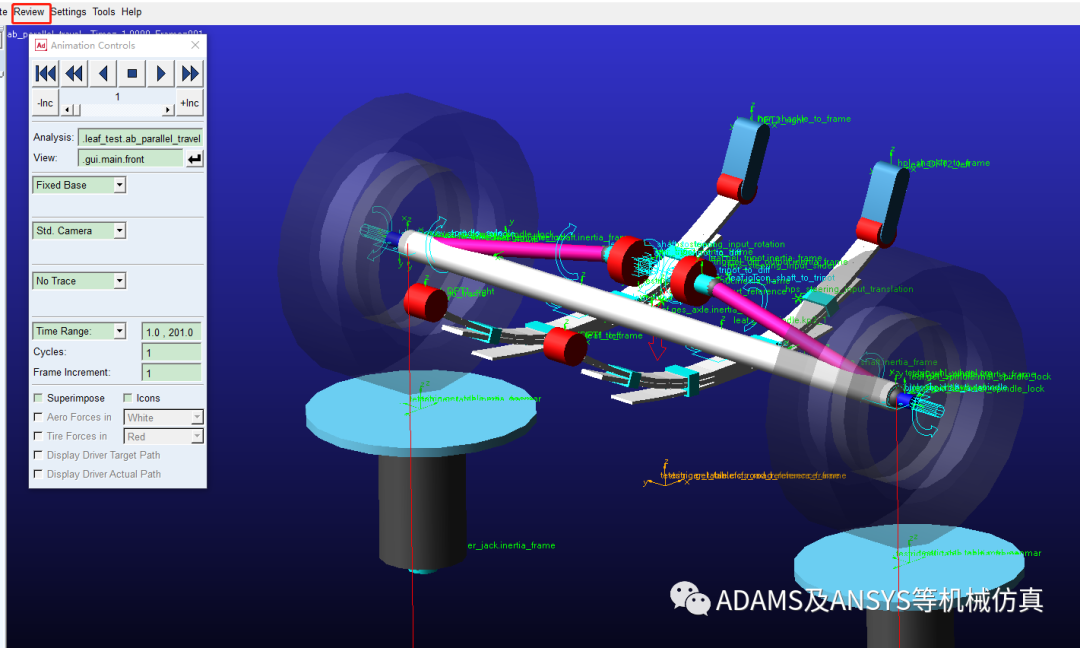
END


