锂电池10大关键制造工艺设备- 涂布设备详解!

涂布工艺是一种基于对流体物性的研究,将一层或者多层液体涂覆在一种基材上的工艺,基材通常为柔性的薄膜或者衬纸,然后涂覆的液体涂层经过烘箱干燥或者固化方式使之形成一层具有特殊功能的膜层。锂离子电池极片涂布的方式目前主要有逗号辊转移涂布、狭缝挤压涂布。

涂布机设备原理及分类
极片涂布设备的原理:将正极或负极等配方所需的材料均匀混合好后涂覆或复合在铝箔或铜箔的正反面,如果需要可以通过能量传导的方式将浆料中的溶剂挥发后达到客户的技术要求的机电一体化设备。
逗号刮刀逆向转移涂布原理如图1所示。
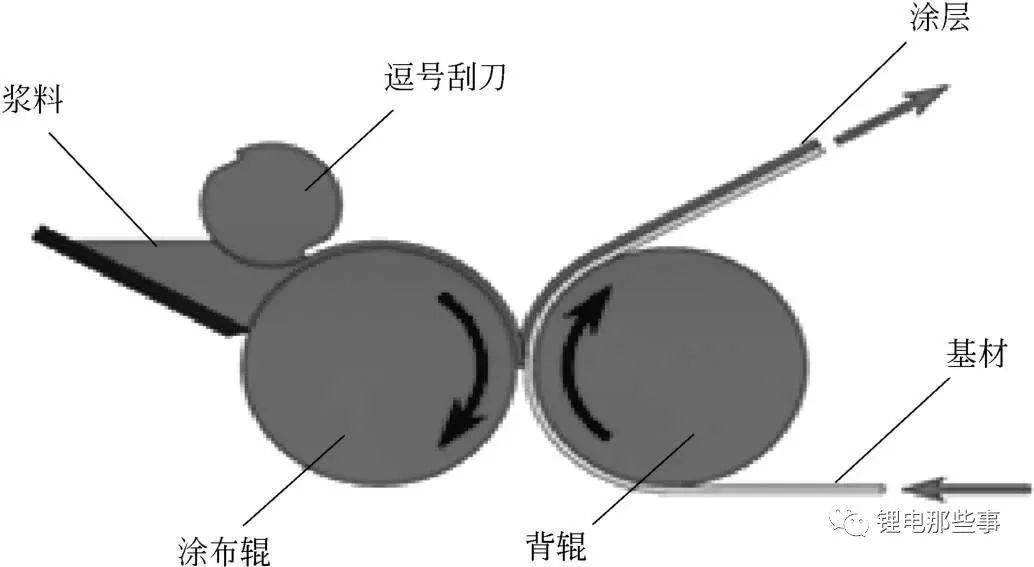
图1 逗号刮刀逆向转移涂布原理
通过调整涂布辊与逗号刮刀之间的间隙大小将浆料计量在涂布辊上,再通过调节背辊和涂布辊的间隙大小实现计量在涂布辊上的浆料全部转移到箔材上。
狭缝模头涂布原理如图2所示。

图2 狭缝模头涂布原理
这是一种高精度的预计量涂布方式,将牛顿或非牛顿流体浆料用计量泵供给狭缝模头后均匀地涂覆在基材表面的一种装置,其中涂布厚度大小计算公式如下:
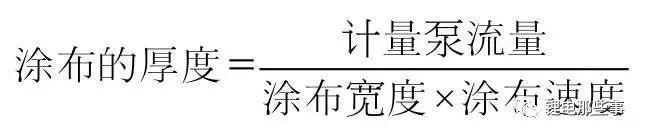
另外,模头是这个狭缝涂布方式的重要部件,是决定涂布精度的关键因素之一。由于涂布的速度越来越快,现在有客户开始使用真空腔机构来保证在高速涂布过程中涂布质量,通常涂布速度≥30m/min的时候要考虑这个负压腔的结构。
狭缝模头原理如图3所示。
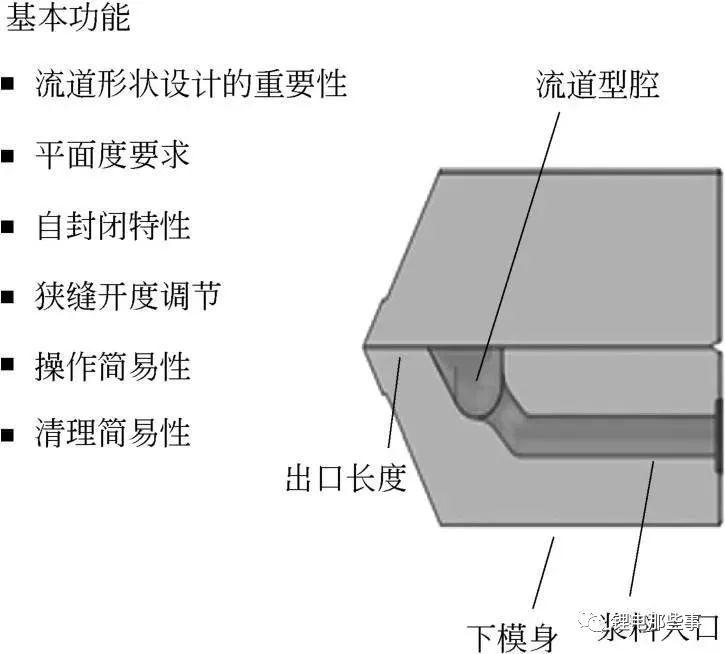
图3 狭缝模头原理
模头的设计要考虑以下几个方面的因素:
①根据浆料的流变参数进行流道型腔计算和仿真;
②上下模唇的平面度和直线度要求;
③模头的材料选择,尽可能选用不锈钢材料;
④使用过程中防止金属异物的产生,如果不可避免一定要做好防护,使异物不能进入浆料中;
⑤方便拆卸和清洗。
干法极片制备原理如图4所示。
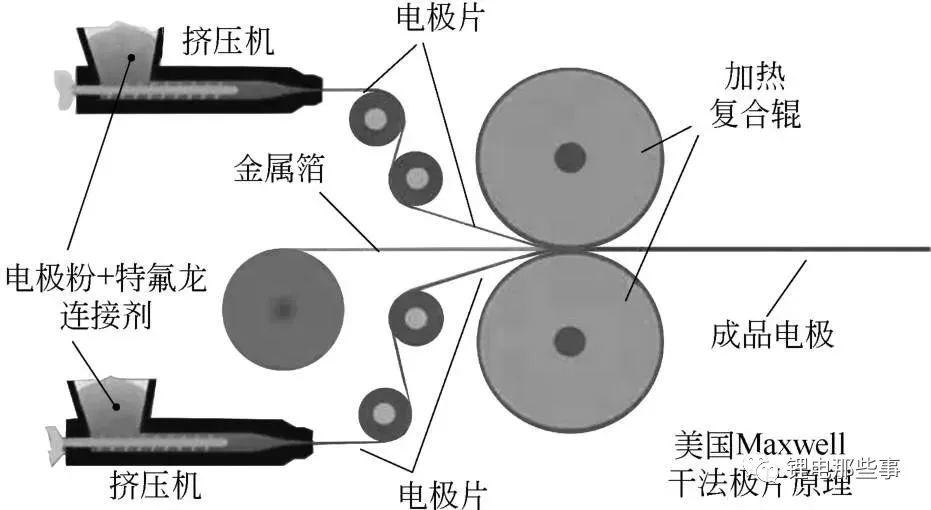
图4 干法极片制备原理
涂布技术有可能成为颠覆性的创新,如果和固态电池技术结合后可以满足未来新型锂电池的需要,例如硫化物固态电解质和干法极片技术是一个很好的期待,这个技术的优势如下:
①可以满足欧洲苛刻的环保要求,生产过程绿色环保;
②生产过程中安全,传统锂电池正极涂布浆料使用的溶剂是NMP溶液,安全性不好;
③设备投入成本低,占地面积小,环境湿度要求降低;
④可以制备厚极片,这样相同的体积比容量可以节约箔材和隔膜,有很好的BOM成本优势。
设备组成及关键结构
设备共由五大部分组成:放卷单元、涂布单元(含供料系统)、干燥单元、出料单元、收卷单元。涂布机单元构成如图5所示。

图5 涂布机单元构成
2.1 放卷单元
放卷方式有自动接带方式和手动接带方式两种。手动接带放卷单元如图6所示。
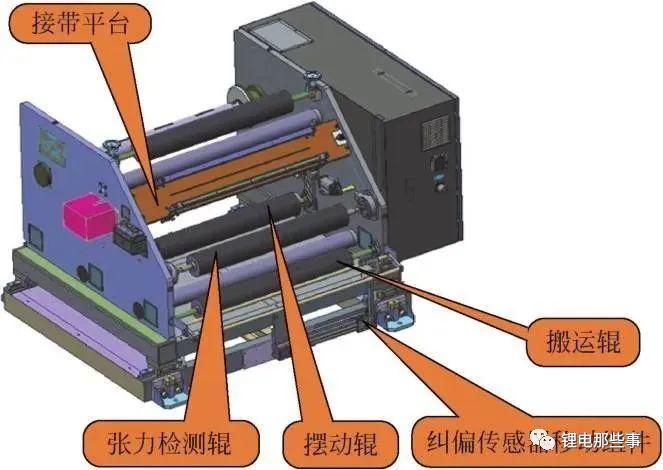
图6 手动接带放卷单元
待生产的成卷材料安装于放卷轴上,经过纠偏及张力控制后,导入涂工部分。该装置的主要控制点为放卷纠偏及张力。
纠偏由专用的EPC控制单元实现,超声波位置检测传感器(可实现对透明箔材的检测)实时检测材料边缘的位置,通过电机驱动放卷装置左右移动,以适合材料的边缘与纠偏传感器的相对位置恒定。
纠偏模式分为三种:全自动,控制系统通电后即进入自动纠偏状态(根据纠偏传感器决定驱动电机的运动);半自动,系统在自动运行时(涂布、牵引)进入自动纠偏状态,而处于停止状态时则进入手动纠偏状态;手动,无论系统处于何种状态,纠偏机构仅可以手动点动操作。
张力控制分为浮辊位置控制及实际检测张力控制两部分。浮辊位置控制原理为:当系统自动运行时,PLC控制器根据电位器反馈的实时浮辊位置信号(0%~100%),以PID算法调节放卷轴电机的转速,以达到浮辊位置恒定(默认设定位置为50%)。
实际检测张力控制可分为三种调节模式,即手动设置电空变换阀的输出比例、开环给定电空变换阀、闭环给定电空变换阀。其中,系统自动运行后,会清除手动状态,切换到自动调节模式。闭环给定模式下,控制系统会根据实测的张力值及设定的张力值进行PID调节,直到实测值与设定值一致。需要注意的是,仅当浮辊实际位置与设定位置的偏差在±20%以内,闭环给定模式才起作用。
2.2 涂布单元及供料和间歇阀系统
(1)涂布单元
涂布单元如图7所示。

图7 涂布单元
由放卷导入的材料进入涂布辊后,经过入料压辊进行张力隔离(放卷张力与出料张力隔离),再由涂布辊,最后导出到干燥炉内。该装置的主要控制点为整机速度的稳定性、模头与背辊之间的缝隙值。
整机的线速度由背辊提供,速度由HMI设定,可分为涂布速度、倒带速度、点动速度。涂布速度即为系统涂布或者牵引时箔材的速度,倒带速度为整机自动反转运行时的速度,点动速度为手动点动某一个部件时的速度,比如点动背辊、点动放卷轴。
模头与背辊之间的位移由两部分驱动。大范围移动通过气缸实现(前进、后退),精确定位由左右两侧的伺服马达驱动(高精度光栅尺检测实际的位移,分辨率0.1μm)。
(2)供料系统
供料系统包含储料罐、计量泵、除铁器、过滤器及连接的管道。
首先将浆料加到储料罐中,在涂布开始后,储料罐里的浆料在计量泵的作用下,经过连接的管道,除铁器及过滤器进入到SLOT DIE进行涂布。在液位传感器检测到储料罐的浆料达到规定液位时,开始对储料罐进行加料。当浆料达到规定的液位时,液位传感器给出指令停止对储料罐进行供料。
图8是供料系统。
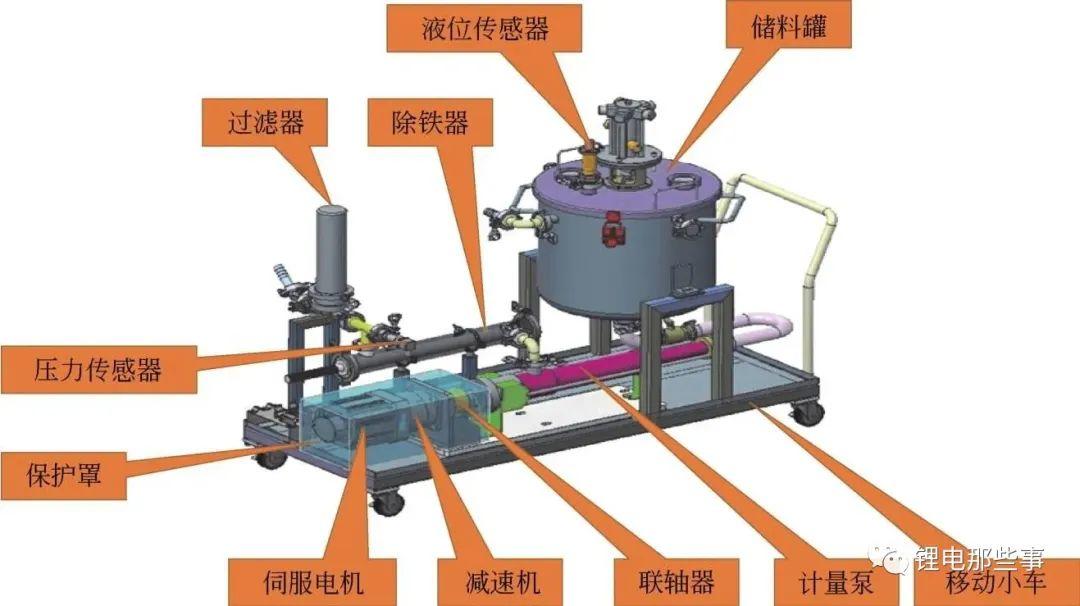
图8 供料系统
(3)间歇阀系统
通过进料阀及回料阀实现对SLOT DIE的涂布供料,并监控涂布压力及回流压力,回流压力用于间歇涂布。间歇阀系统如图9所示。
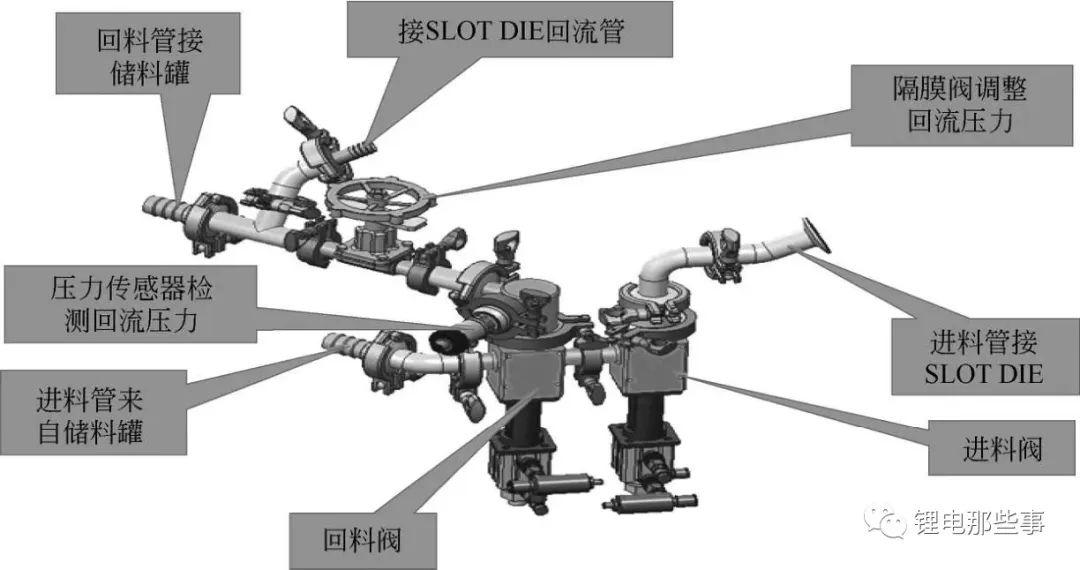
图9 间歇阀系统
2.3 干燥单元
干燥原理示意图如图10所示。
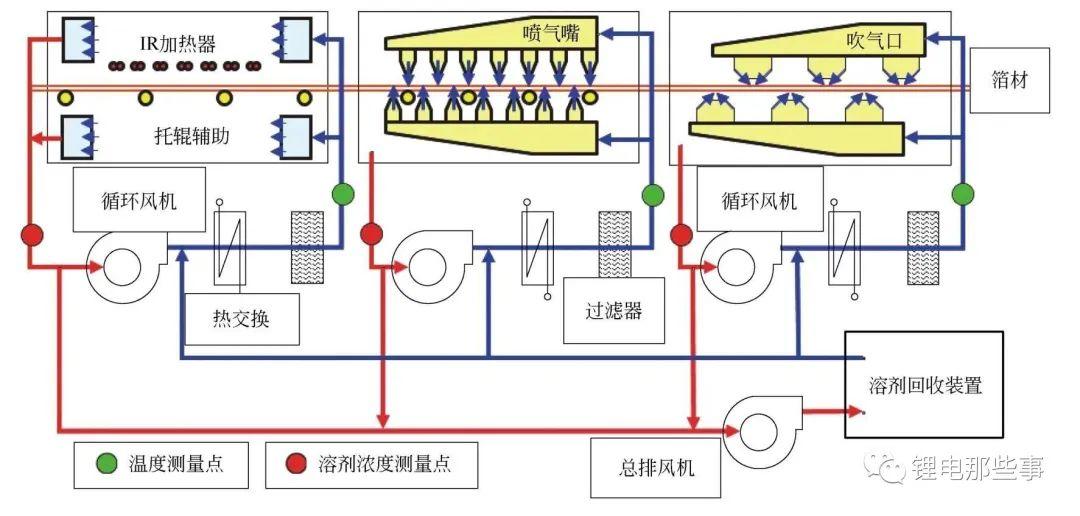
图10 干燥原理示意图
由涂布单元生产的含有液态溶剂成分的浆料和箔材一起进入干燥炉内,为了安全有效地蒸发掉溶剂,需要控制各段干燥炉的温度、送风量、排风量等。单节温控系统由加热和循环风机组成。风机由变频电机驱动,可通过频率的设定改变风量及风速(与频率成正比),通过传感器检测控温点温度变化实现加热温度的恒定控制从而保证干燥的质量;有时为了提高干燥的效率会使用辅助加热系统,例如红外或者激光加热,前提是要保证安全的条件下,特别是有机溶剂的使用更要按国家安规要求来设计和使用。
2.4 出料单元
出料单元如图11所示。

图11 出料单元
干燥后的箔材进入出料装置。由出料装置控制干燥炉内的张力及箔材边缘位置。该装置的主要控制点为干燥区域纠偏及张力。
纠偏与放卷单元(2.1部分)相同。
出料张力控制为电机转速控制,根据目标张力和实测张力进行PID运算,并调节出料电机的转速,以此达到张力恒定的效果。
2.5 收卷单元
收卷方式有自动接带方式和手动接带方式两种,图12所示是手动接带收卷单元。

图12 手动接带收卷单元
生产完成的卷材经过纠偏及张力控制后,导入收卷轴。该装置的主要控制点为收卷纠偏及张力。纠偏与张力控制与放卷单元(2.1部分)相同。
在收卷过程中,为了使箔材层与层之间不打滑,防止材料收卷时过紧或者出现抽芯现象,需要对收卷张力进行锥度调节。关于收卷锥度张力的使用方法,参见“收卷设置及锥度计算说明”部分。
设备选择
3.1 设备选择原则
(1)安全第一
由于我们涂布机正极有NMP有机溶剂,所以防爆要求很严格,要符合行业标准《锂离子电池工厂设计标准》(GB 51377—2019)。
(2)保证电池的安全性能,防止金属异物产生
由于锂电池生产过程中最怕金属异物混入,所以和浆料及极片接触或近距离的部分不能使用铜、锌、锡;如果需要金属表面防护,优先选择顺序是:烤漆、镀镍、镀铬。这里推荐烤漆是最好的防护,和浆料近距离接触的部件可以使用镜面级不锈钢板来做表面的防护,另外还要做好除去金属磁性物的措施,例如浆料和烘箱及基材的除磁处理。
3.2 部分设备及参数的选择
(1)涂布方法
目前主要是使用狭缝模头涂布方法。
(2)涂布模头的选择
①由于电池浆料是非牛顿流体,所以首先需要对浆料做流变参数测试,通常使用专用的流变仪来完成,根据流变参数计算和仿真结果来设计模头的流道形状保证涂布的精度。
②推荐模头安装角度为向上25°仰角安装,这样可以在清洗模头后使用时快速将管道及模腔内空气排出,不能使用模头回流管道替代排气功能。
涂布机如图13所示。
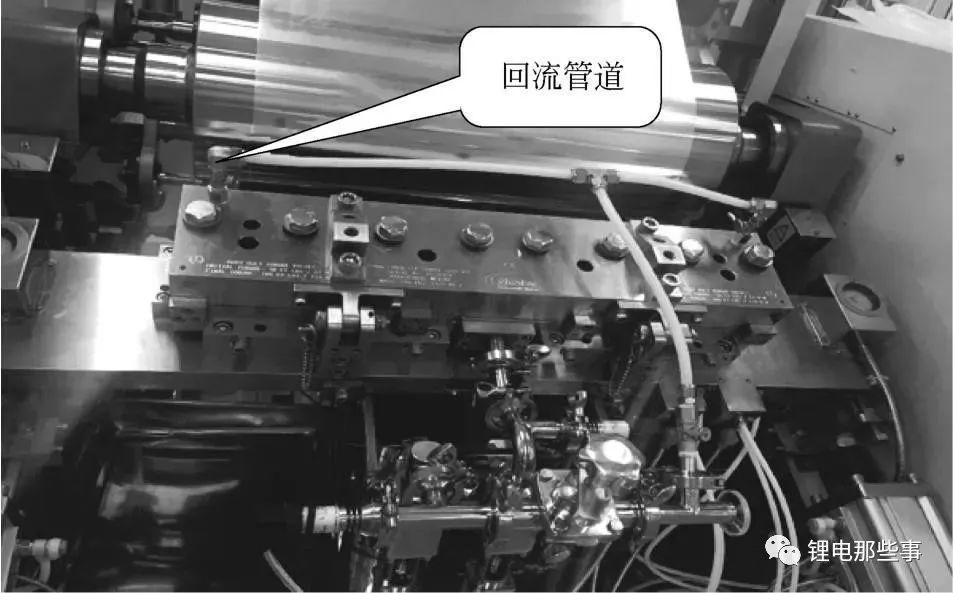
图13 涂布机示意图
(3)上料泵的选择
通常是使用计量精度高的螺杆泵,根据流量的大小来选择泵的规格和型号,为了提高泵送精度推荐使用双泵结构,这样脉动小且精度高。
(4)烘箱的选择
①烘箱总长度及单节烘箱长度
通常先确定烘箱单节长度,推荐烘箱单节长度不要低于4m,干燥速度越快单节长度就越长,但是要考虑运输和装配的科学性,推荐单节烘箱长度最大不要超过5m,烘箱总长度的确认是要根据使用方的干燥工艺和涂布速度等一系列的参数经过验证后来确认,通常是使用方给出这个指标,设备制造厂家来满足工艺参数。
②烘箱干燥的温度范围。推荐温度为室温至140℃之间,如果工艺有特殊要求可以定制,一般最高温度不超过160℃。
③烘箱的干燥风速范围。推荐使用5~20m/s,全部喷嘴精度在±20%以内。
(5)基材在烘箱中的传输方式
①铜箔/铝箔基材的厚度大于6~10μm时,推荐使用主动导辊和悬浮烘箱相结合方式。
②铜箔/铝箔基材的厚度小于6~10μm时,由于抗拉强度的下降推荐使用主动导辊。
(6)干燥加热方式的选择
①如果是NMP作为溶剂,优先选择饱和蒸汽作为热源,其次是热油,不推荐电加热,如果使用电加热建议全补全排方式。
②如果是水做溶剂,以上三种都可以,推荐不分先后。
(7)收卷直径的选择
由于放卷直径是根据来料的直径来匹配的,所以这里不做详细说明,但是收卷直径的选择还是有技巧的,推荐根据分切或模切电池单个极片长度累计对应的小卷的长度来决定大卷长度再换算成卷径,计算公式如下:
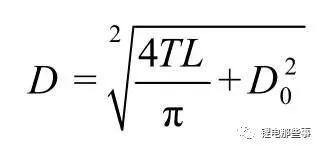
式中,D为卷料直径;D0为底筒直径;T为极片厚度;L为极片长度。
这样才能增加材料的利用率,减少浪费,降低成本,由于自动化程度的提高,根据公式可以看出增加底筒直径可以更好地增加整卷极片长度,同时也能减小底部极片压力,提高收卷质量。
(8)控制系统的选择
通常涂布机是采用PLC作为控制系统的主要器件,推荐使用有工业以太网总线控制为主的器件,数字控制为主,这样为今后的智能制造打下坚实的基础。
设备使用说明
在使用涂布机前做好系统参数的设定(以西门子PLC举例说明)。
4.1 浮辊(跳舞辊)位置标定方法(以放卷为例)
浮辊(跳舞辊)位置标定如图14所示。

图14 浮辊(跳舞辊)位置标定示意图
①关闭放卷浮辊的气源。
②触摸屏按钮“系统参数”→“放卷参数”。
③将浮辊手动抬到最低限位,并保持不动;按下浮辊标定一列的“下限标定”。
④将浮辊手动抬到最高限位,并保持不动;按下浮辊标定一列的“上限标定”。
⑤缓慢放下浮辊,观察实测位置是否从100%逐渐递减,若不是,需要重新标定。
注意事项:浮辊角度传感器在一圈之内分成四个区域,0°~90°电流从4mA到20mA递增;90°~180°电流保持20mA不变(定义为盲区);180°~270°电流从20mA到4mA递减;270°~360°电流保持4mA不变(定义为盲区)。由于浮辊摆动的角度在30°左右,一定要确定浮辊摆动时,角度传感器的输出电流是有变化的,不可以处于盲区之内。
4.2 张力传感器标定(以出料为例,放卷和收卷类似)
张力传感器标定如图15所示。

图15 张力传感器标定示意图
①触摸屏按钮“系统参数”→“出料参数”,确认张力传感器上无任何物体,按下张力传感器一列的“零张力标定”。
②将扁平纺织带按照穿带路径放好,并放置于辊面的正中间位置。一端固定,另一端挂最大质量砝码(最大张力×1.2为最合适的值,可以适当调整但不可低于最大张力值)。保持砝码处于自由状态且不动。触摸屏按钮“系统参数”→“放卷参数”,输入标定质量为砝码质量×9.8(为了方便计算,一般直接乘以10),按下张力标定的“满张力标定”。
注意事项:张力传感器根据所受的压力成比例地输出电信号,而这个压力为张力传感器辊及前后两根过辊形成的两个力的矢量合成力。故张力标定时,所挂砝码的路径一定要按照实际的穿带路径经过张力传感器辊及前后两根过辊,其他的过辊不需要按实际路径穿过。
4.3 卷径测量传感器标定(以放卷为例,收卷类似)
卷径测量传感器标定如图16所示。

图16 卷径测量传感器标定示意图
①触摸屏按钮“系统参数”→“放卷参数”,输入卷径传感器距离A(输入卷径传感器距离B)参数,该参数定义了卷径传感器的端面至卷轴圆心的距离。
②设定好该参数后,将一未使用的卷筒安装于放卷轴上,再观察“操作监控”内实测的卷径数据,根据实测的卷径数据和工人测量的卷径数据对比,可以微调修正“输入卷径传感器距离”参数。
假设,输入卷径传感器距离A=520.0,将一卷人工测量出来的卷径为300mm的卷筒放置于放卷A轴上,然后在“操作监控”页面观察到放卷A轴的实测卷径为297mm,那么应该将输入卷径传感器距离A修正为520.0+(300-297)/2=521.5mm。
4.4 模头与背辊间隙标定(简称GAP值设定)
模头与背辊间隙标定如图17所示。

图17 模头与背辊间隙标定示意图
①触摸屏按钮“模头参数”,进入模头设置画面。
②选择手动模式。
③准备好塞尺,并选择200μm的量程片。
④点动进退模头,并用塞尺片去检测模头左右两侧的缝隙,感觉有一定的阻力时表明当前模头缝隙为200μm。
⑤将触摸屏内的基准位置设置为200μm。
⑥按下“确认基准”。
完成基准设置后,再点动模头前进,并观察实际的模头位置值,当模头位置值不再变化时,说明模头已经落在了机械限位上。反过来再来确认当前的限位值是否理想(推荐的限位值为50μm左右),如果不在推荐范围之内,可以调节机械限位螺丝,并随时观察模头的实测位置,当实测位置达到了理想状态,即可以锁紧限位螺丝,同样的方法对模头两侧的机械限位进行调整并达到理想状态,按下“设置下限”,以后模头的设定位置就一定要大于或等于机械限位的值了。
4.5 自动换卷结构标定
自动换卷结构标定如图18所示。
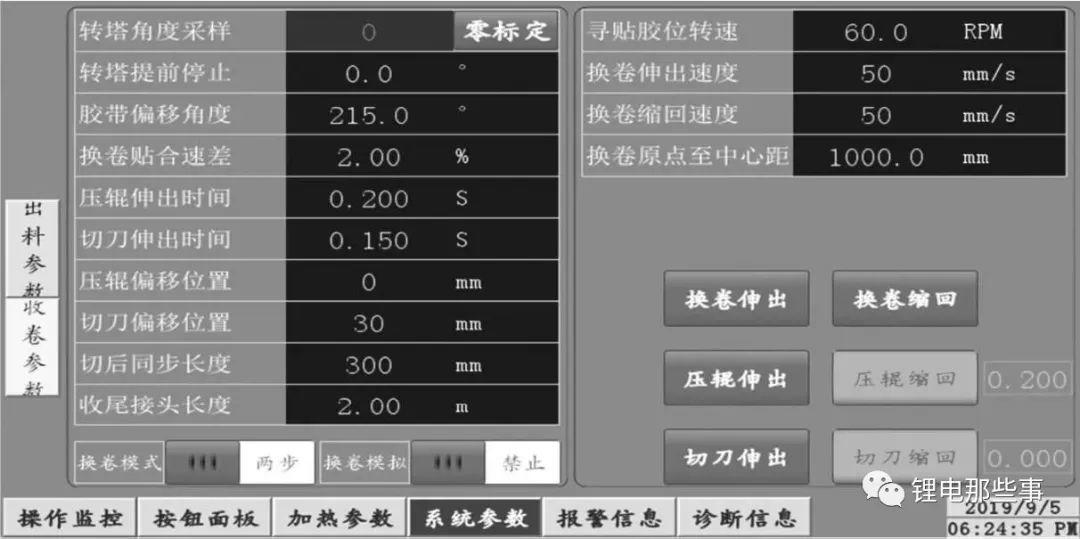
图18 自动换卷结构标定示意图
以下是以自动收卷为例,自动放卷类似。
①在收卷触摸屏,触摸屏按钮“系统参数”,进入系统参数界面,点“收卷参数”后再点“下一页”。
②转塔角度采样:此参数显示了转塔角度编码器的当前值,按下“零标定”则表示操作者需要将当前位置设为转塔的零位。需要注意的是,标定零位的条件是A轴在里B轴在外,即A轴靠近换卷机构B轴操作,同时要求换卷机构平移的线路正好穿过A轴的圆心。
③胶带偏移角度:用以设定贴胶带的位置与卷轴圆心的连线和换卷机构平移的线条之间的夹角。此值为机械物理值,机械设计安装好以后,该值按照设计值设定后严禁更改。
④换卷贴合速差:此值用来设定换卷时两轴之间的给定速度差,一般设定为正数(如图4-34设定的2%),即待用轴的速度比工作轴的速度快2%,这样在压辊伸出时两轴之间的箔材才能张紧。
⑤压辊伸出时间:设定压辊从电磁阀通电到压辊压住卷轴所需要的时间。
⑥切刀伸出时间:设定切刀从电磁阀通电到切断箔材所需要的时间。
⑦压辊偏移位置:设定压辊伸出压卷轴的位置偏移量,设为正数则代表滞后压,负数则代表提前压。
⑧切刀偏移位置:设定切刀伸出切断箔材的位置偏移量,设为正数则代表滞后切,负数则代表提前切。
⑨切后同步长度:设定切刀切断后,压辊还继续压住的距离,图示设定值为300mm则表示切刀切断后压辊继续压辊卷轴,箔材经过300mm后压辊才缩回。
⑩收卷接头长度:设定切刀切断后,下料轴继续运行的距离,以此将切断后剩余的箔材全部收集到卷轴上。
⑪寻贴胶位转速:设定手动点动寻贴胶位时的卷轴转速。
⑫换卷伸出速度:设定换卷机构伸出时的速度。
⑬换卷缩回速度:设定换卷机构缩回时的速度。
⑭换卷原点至中心距:设定换卷机构缩回到后退原点且压辊缩回,此时压辊的前端面至待用轴圆心之间的距离。
4.6 操作监控界面的说明
操作监控界面如图19所示。
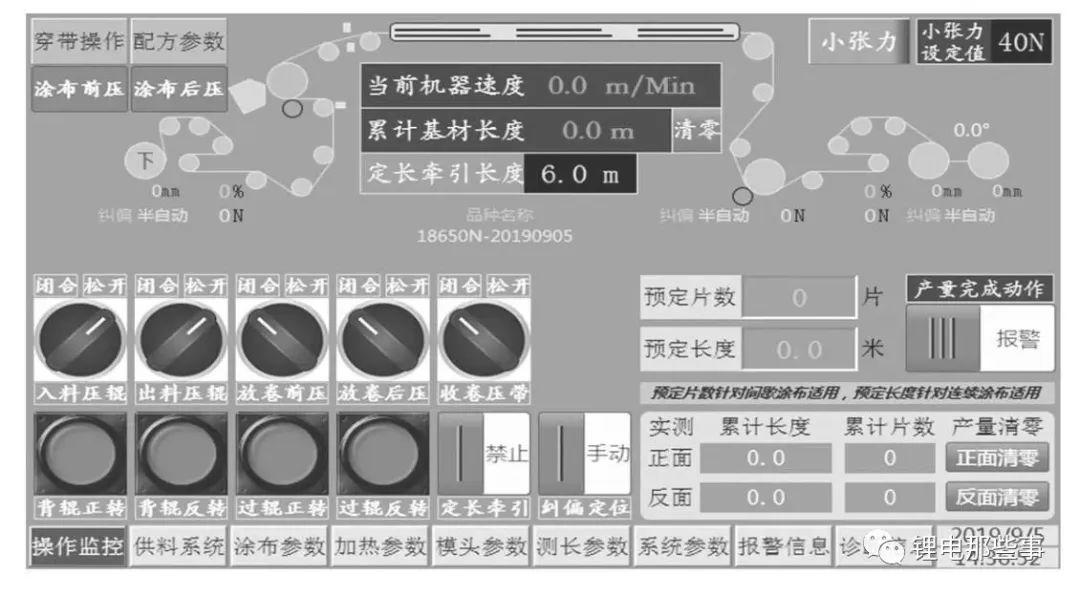
图19操作监控界面示意图
本界面主要做过程监控用。
①定长牵引长度:当“定长牵引”允许时,按下牵引按钮,系统会走一段定长牵引长度后自动停止,该功能主要为方便首检试片用。
②累计基材长度:显示收卷的基材长度(倒带时递减)。
③放卷部分:纠偏状态显示了当前纠偏开关的选择状态(全自动、半自动、手动);300mm显示了当前放卷直径;80N表示当前实测的左右张力和;50%显示了当前浮辊的相对高度。
在“当前机器速度”字体上按一下,可以切换显示各段张力的左右测量值,N(+)表示当前实测的左右张力和;N(-)表示当前实测的左右张力差;N(L)表示当前实测的左侧张力;N(R)表示当前实测的右侧张力。此功能对放卷、出料及收卷均适用。
④出料部分:EPC状态显示了当前纠偏开关的选择状态(全自动、半自动、手动);100N表示当前实测的左右张力和。
⑤收卷部分:纠偏状态显示了当前纠偏开关的选择状态(全自动、半自动、手动);350mm显示了当前收卷直径;120N表示当前实测的左右张力和;50%显示了当前浮辊的相对高度。
⑥选择开关与按钮为各部件的手动操作,如涂辊正转按钮可点动正转涂布辊(非自动状态时)。
⑦预定片数是指客户预约间歇涂布时的产量片数,预定长度是指客户预约连续涂布时的产量长度。产量完成动作可分为报警、停机,报警意味着当实际产量达到预定值时三色塔灯以声光报警通知操作员;停机意味着当实际产量达到预定值时,系统自动停机并且三色塔灯以声光报警通知操作员。注意,当预定的产量为零时,系统不会监控预定产量。
⑧实测产量显示了涂布生产的总长度与片数。可以通过清零按钮清除产量信息。
⑨在界面上按下放卷或者收卷,可切换收放卷路径(需要操作级权限)。按下放卷或者出料、收卷的张力显示处,可以调出收放卷及出料的张力纠偏参数设置。
⑩当前品种名称显示了当前正在使用的品种名称。
⑪0.0°显示了当前转塔实际的角度。一定要注意的是标定零位时A轴在里侧;即当A轴在里侧时应该显示0.0°左右即为正常,若显示为180°左右则表示标定错误(B轴在里侧时标定了零位)。
4.7 配方界面参数说明
配方界面参数如图20所示。

图20 配方界面参数示意图
本界面主要做配方参数用。
配方功能是为了让客户方便管理产品而设定的一个参数集 合。针对某一个产品型号所对应的特定参数(比如涂布速度、涂布速比、留白速比、涂布长度、设定温度、刮刀高度等)统一起来,可以存储、调用、删除。在生产某一个新的品种时,操作人员需要进行一些参数的设置,当确定这些参数都符合工艺要求时,操作人员可以将所有的这些参数以品种名称作为索引号保存起来,当下次再生产相同的产品时,只要从配方表里选择该品种名称,并调用,则系统会自动将上次存储的参数恢复到PLC控制系统内,立即进行生产。
功能界面说明:
#1保存配方:按下该按钮后,系统将当前显示的各参数值以当前设置的“品种名称”保存至配方系统内。
#2删除配方:按下该按钮后,系统会将当前选择的品种名称所存储的参数全部删除。
#3上传配方:按下该按钮后,将PLC内的各数据上传到当前配方系统界面显示。
#4下载配方:按下该按钮后(需要按住1s以上,成功后显示绿色),将当前品种所存储的各参数值下载到PLC系统内。
#5品种名称:设定需要操作的品种名称,比如18650A、NCF6954102JK。
#6编号:配方系统内的编号,用户不可操作。
#7、#8数据名称和值:显示了当前相关参数的设定值。
4.8 首次穿带操作说明
首次穿带操作如图21所示。
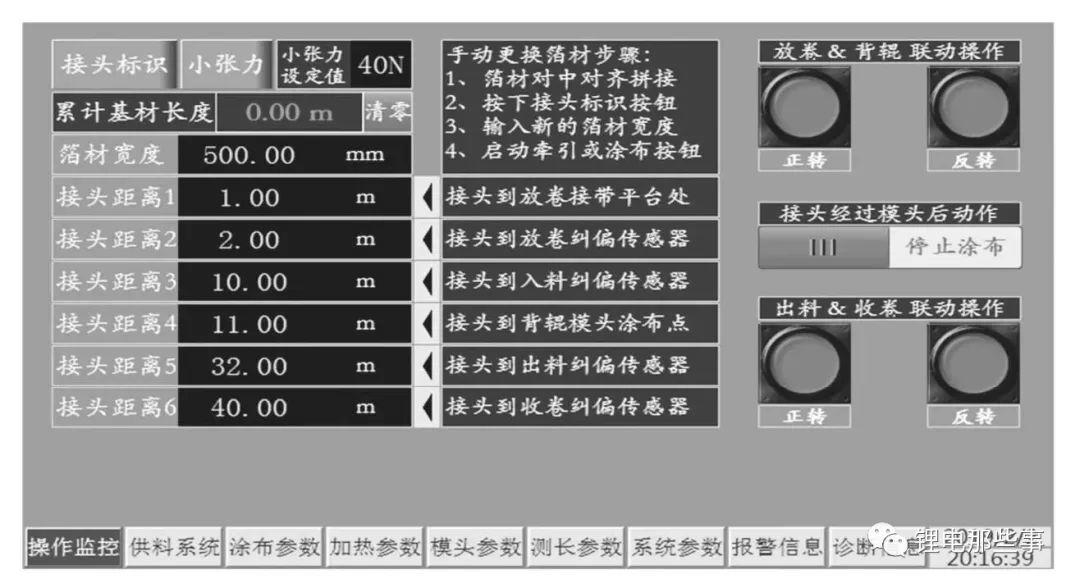
图21 首次穿带操作示意图
本界面主要做穿带操作用。
①放卷与背辊联动:可以让放卷轴与背辊作为一个整体联动,背辊保持恒定的速度(手动速度),放卷轴通过浮辊进行PID调节并跟随背辊动作。
②出料与收卷联动:可以让收卷轴与出料辊作为一个整体联动,出料辊保持恒定的速度(手动速度),收卷轴通过浮辊进行PID调节并跟随出料辊动作。
③接头距离1:定义了从放卷接带平台处至放卷纠偏传感器之间的箔材走行距离,此参数在现场调机完成后设定,之后严禁更改,除非机器有挪动则需要重新标定。
④接头距离2:定义了从放卷接带平台处至入料纠偏传感器之间的箔材走行距离,此参数在现场调机完成后设定,之后严禁更改,除非机器有挪动则需要重新标定。
⑤接头距离3:定义了从放卷接带平台处至模唇吐料位置之间的箔材走行距离,此参数在现场调机完成后设定,之后严禁更改,除非机器有挪动则需要重新标定。
⑥接头距离4:定义了从放卷接带平台处至出料纠偏传感器之间的箔材走行距离,此参数在现场调机完成后设定,之后严禁更改,除非机器有挪动则需要重新标定。
⑦接头距离5:定义了从收卷接带平台处至出料纠偏传感器之间的箔材走行距离,此参数在现场调机完成后设定,之后严禁更改,除非机器有挪动则需要重新标定。
换卷过程如下:新箔材和旧箔材的中心对齐拼接;按下接头标识按钮;输入新的箔材宽度;启动牵引或涂布按钮。以上四个步骤必须要按顺序操作,否则纠偏传感器自动定位不能正常工作,当接头经过每一处纠偏传感器时,系统会根据箔材的宽窄自动调整纠偏传感器的位置;如果新箔材宽度大于旧箔材,则在每一个纠偏传感器处提前1m关闭纠偏动作,并调整传感器位置,滞后1m打开纠偏动作;如果新箔材宽度大于旧箔材,则在每一个纠偏传感器处提前1m关闭纠偏动作,滞后1m调整传感器位置并打开纠偏动作;如果新箔材宽度等于旧箔材,则在第一个纠偏传感器处提前1m关闭纠偏动作,滞后1m打开纠偏动作,接头经过模唇时提前1m将模头后退,如果当前处于涂布状态时,则系统关闭涂布功能,滞后1m停止走带;如果当前处于牵引状态,则系统仅将模头后退。
4.9 放卷设置
放卷设置如图22所示。

图22 放卷设置示意图
①放卷断带检测:设定为允许时,系统自动运行时检测到放卷浮辊处于最低位置,则判断为断带。
②放卷点动转速:设定放卷轴点动时的转速值(单位RPM,即r/min)。由于放卷卷径不确定,故放卷点动时采用固定的转速设置。
③放卷高速张力:设定自动运行且目标速度大于张力切换速度时放卷段的目标张力,机器停止时也是使用该值。
④放卷低速张力:设定自动运行且目标速度小于张力切换速度时放卷段的目标张力。
⑤卷径下限报警:设定放卷轴的下限报警直径,当系统检测到放卷直径小于该设定值时,系统以报警声音和信息提示操作者,但是该报警并不会影响机器的自动运行。
⑥纠偏传感器回零、纠偏传感器定位、纠偏传感器停止三个按钮允许在手动情况下操作纠偏传感器。
⑦纠偏操作:可手动点动纠偏机构移动(左移、居中、右移),可选择纠偏动作模式。
半自动:当系统正向运行(涂布或牵引)时,纠偏自动工作,当系统反向运行(倒带)或停止时,纠偏处于手动状态。
全自动:系统通电后,只要不是反向运行(倒带),则纠偏处于自动状态;若系统反向运行(倒带),则纠偏处于手动状态。
4.10 出料设置
出料设置如图23所示。

图23 出料设置示意图
①出料断带检测:设定为允许时,系统自动运行时检测到出料张力小于5N,则判断为断带。
②出料高速张力:设定自动运行且目标速度大于张力切换速度时出料段(烘箱段)的目标张力,机器停止时也是使用该值。
③出料低速张力:设定自动运行且目标速度小于张力切换速度时出料段(烘箱段)的目标张力。
④纠偏传感器回零、纠偏传感器定位、纠偏传感器停止三个按钮允许在手动情况下操作纠偏传感器。
⑤纠偏操作:可手动点动纠偏机构移动(左移、居中、右移),可选择纠偏动作模式。半自动:当系统正向运行(涂布或牵引)时,纠偏自动工作,当系统反向运行(倒带)或停止时,纠偏处于手动状态。
全自动:系统通电后,只要不是反向运行(倒带),则纠偏处于自动状态;若系统反向运行(倒带),则纠偏处于手动状态。
4.11 收卷设置及锥度计算说明
收卷设置如图24所示。
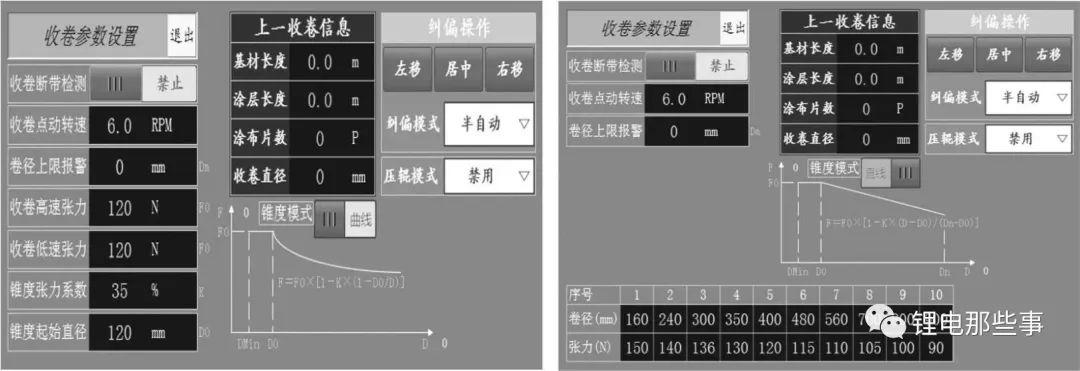
图24 收卷设置示意图
①收卷断带检测:设定为允许时,系统自动运行时检测到收卷浮辊处于最低位置,则判断为断带。
②收卷点动转速:设定收卷轴点动时的转速值(单位RPM,即r/min)。由于收卷卷径不确定,故收卷点动时采用固定的转速设置。
③收卷高速张力:设定自动运行且目标速度大于张力切换速度时收卷段的目标张力,机器停止时也是使用该值。
④收卷低速张力:设定自动运行且目标速度小于张力切换速度时收卷段的目标张力。
⑤卷径上限报警:设定收卷轴的上限报警直径,当系统检测到收卷直径大于该设定值时,系统以报警声音和信息提示操作者,但是该报警并不会影响机器的自动运行。
⑥纠偏传感器回零、纠偏传感器定位、纠偏传感器停止三个按钮允许在手动情况下操作纠偏传感器。
⑦纠偏操作:可手动点动纠偏机构移动(左移、居中、右移),可选择纠偏动作模式。半自动:当系统正向运行(涂布或牵引)时,纠偏自动工作,当系统反向运行(倒带)或停止时,纠偏处于手动状态。
全自动:系统上电后,只要不是反向运行(倒带),则纠偏处于自动状态;若系统反向运行(倒带),则纠偏处于手动状态。
⑧压辊模式:收卷压辊的动作模式。
禁用:自动换卷完成后压辊缩回且换卷机构缩回到后退零位。
非接触:自动换卷完成后压辊保持伸出状态,换卷机间歇后退,且始终保持压辊前端与收卷箔材端面距离在20mm左右,当收卷直径逐渐增大时,换卷机构会自动后退,始终保持这个间隙。
在收卷过程中,为了使箔材层与层之间不打滑,防止材料收卷时过紧或者出现抽芯现象,需要对收卷张力进行锥度调节。收卷张力有两种锥度张力模式:曲线锥度和直线锥度。
曲线锥度:锥度张力与收卷的卷径有关,F=F0×[1-K×(1-D0/D)]。式中,F0为设定张力;K为锥度系数;D0为锥度起始直径;D为当前实际直径;F为目标张力。当实测卷径小于锥度起始直径时,张力为恒张力;当实测卷径大于锥度起始直径时,张力随着直径的增加逐渐减小。
直线锥度:锥度张力与收卷的卷径有关,F=F0×[1-K×(D-D0)/(Dn-D0)]。式中,F0为设定张力;K为锥度系数;D0为锥度起始直径;D为当前实际直径;F为目标张力;Dn为锥度结束直径。直线锥度共有10个设定点。任意一设定点的直径为0则表示从该设定点后的数据不起作用,比如卷径5设为0,则表示直线锥度只使用前四点规划张力拆线;当实际卷径小于卷径1时,则张力恒定为张力1;当实际卷径大于卷径10时,则张力恒定为张力10。假设当前卷径=200mm,则目标张力=150+(200-160)×(140-150)/(240-160)=145N。
4.12 涂布参数
涂布参数设置如图25所示。
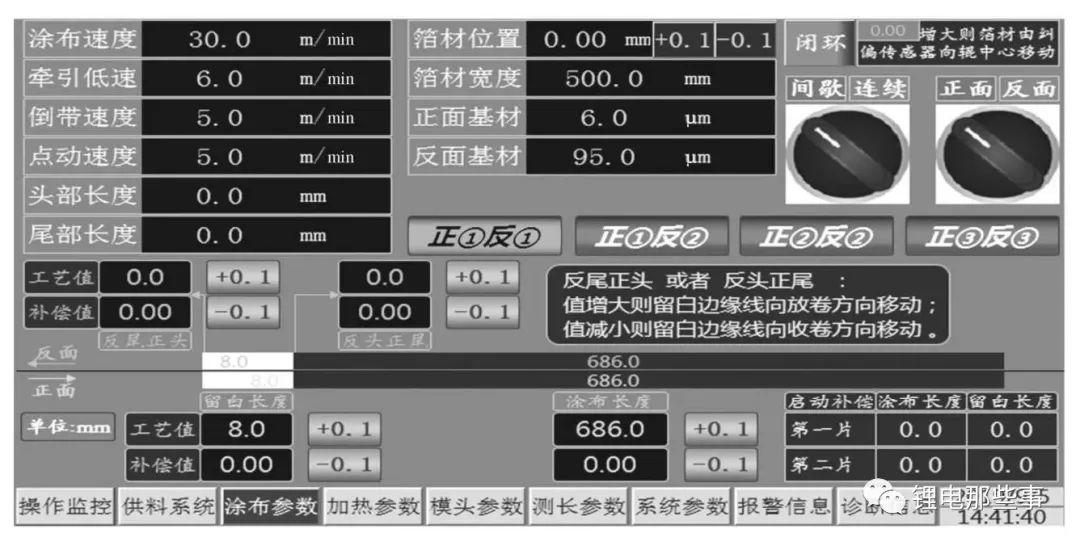
图25 涂布参数示意图
①涂布速度:设定涂布及牵引时整机的速度。
②牵引低速:设定低速牵引时整机的速度。
③倒带速度:设定倒带时整机的速度。
④点动速度:设定手动状态下点动各传动辊的速度。
⑤头部长度:设定由留白切换至涂布的位置点,当设置为负值时表示提前打开供料阀再延时该时间(绝对值)后关闭回流阀;当设置为正值时表示提前关闭回流阀再延时该时间(绝对值)后打开供料阀。
⑥尾部长度:设定由涂布切换至留白的位置点,当设置为负值时表示提前打开供料阀再延时该时间(绝对值)后关闭回流阀;当设置为正值时表示提前关闭回流阀再延时该时间(绝对值)后打开供料阀。
⑦停机补偿:间歇涂布时,当按下停止按钮,系统会自动将当前涂布长度完成后停止,由于停止时背辊的惯性导致极片仍有可能滑动,所以再开机时留白的长度会有偏差,操作人员可以将这个实际的偏差设置为停机补偿参数,则在下次停止状态后,系统自动补偿留白长度。
⑧箔材宽度:设定当前使用的基材的宽度。系统会自动调整纠偏传感器的位置以适应箔材处于辊面的中心。
⑨正面基材:设置为铜箔或者铝箔的厚度。间涂定位系统会根据此参数自动调整模头与基材表面之间的距离,以保证第二面和第一面涂布时,背辊与涂辊之间的距离相同。
⑩反面基材:设置为铜箔或者铝箔加上第一面涂层的总厚度。间涂定位系统会根据此参数自动调整模头与基材表面之间的距离,以保证第二面和第一面涂布时,模头与基材表面之间的距离相同。
⑪箔材位置:理论上,挤压模头和涂布背辊及机器各固定过辊的中心在一条线上(实际上可能有微小的偏差)。绝大部分要求涂层位于箔材的正中间部分(左右留边的宽度相等),当更换箔材的宽度时就需要调整纠偏传感器的位置(放卷和出料纠偏传感器在运行过程中是固定的,它们决定了整个箔材的边缘位置)。操作人员只需设定当前使用箔材的宽度,系统会自动调整放卷及出料纠偏传感器的位置,以使箔材居中。在实际使用过程中,可能需要微调纠偏传感器来适应生产。调整“箔材位置”参数即可满足要求,系统会自动判断,当处于非自动状态时,纠偏传感器的运行速度为50mm/s;当系统处于自动运行状态时纠偏传感器的运行速度为0.6mm/s(调整过程中纠偏正常工作,低速是为了保障箔材不折皱)。
⑫间歇/连续切换开关:用以设置是间歇涂布还是连续涂布。
⑬正面/反面切换开关:用以设置是正面涂布还是反面涂布。注意,即使是连续涂布时也应该选择正反面,因为这涉及涂反面时背辊与涂辊之间的距离多了一个单层的厚度。
⑭正一反一、正一反二、正二反二、正三反三:用来设置极片留白的段数。正一反一表示正面一段留白反面一段留白,其他类推。
⑮长度参数:用来设置极片各段涂布长度与留白长度。注意,一定要按照工艺规定设置工艺值,当实际涂布时发现实测的长度与设置值不符合时,应该通过补偿值来修正,比如设定涂布长度为500mm,而实测涂布长度为498mm,则应该将补偿值设置为+2mm,当极片规格为正二反二时,正面应该先涂留白有差异的一面,这样主要是为系统涂反面时可以自动通过留白长度来识别当前的段数。
头部延时、尾部延时之间的切换关系如下:
假设设置了涂布速度6m/min(0.1mm/ms)、正一反一规格、涂布长度为500mm、留白长度为20mm、头部长度5mm(对应的时间为50ms)、尾部长度2mm(对应的时间为20ms)。则当涂布完成时,完成涂布长度500mm后先关闭供料阀再延时20ms打开回流阀;完成留白长度20mm后先打开供料阀再延时50ms后关闭回流阀。
假设设置了涂布速度6m/min(0.1mm/ms)、正一反一规格、涂布长度为500mm、留白长度为20mm、头部长度8mm(对应的时间为80ms)、尾部长度3mm(对应的时间为30ms)。则当涂布完成时,完成涂布长度500mm后先打开回流阀再延时30ms关闭供料阀;完成留白长度20mm后先关闭回流阀再延时80ms后打开供料阀。
注意,头部开始的动作为供料阀打开、回流阀关闭(由头部时间值的正负决定哪个阀先动作);尾部开始的动作为供料阀关闭、回流阀打开(由尾部时间值的正负决定哪个阀先动作)。
为方便圆柱动力电池的涂布(一般动力电池有两个以上的极耳),程序设置了三段不同的涂布与留白长度参数。特别情况:基于程序反面定位的原理,要求极片的长度大于光纤点到涂布点之间的距离。而对于正反面均为单留白规格的极片,程序内做了特殊处理,不受极片长度限制,当极片为多留白规格时,要求每段留白长度均小于色标传感器到涂布点之间的距离。
按照工艺规定设置好涂布长度和留白长度,若实测的涂布长度和设定工艺值不相符,请通过修改“补偿值”来修正;留白长度的设置同理。切记不要直接在涂布长度和留白长度工艺值参数栏内直接修正。
系统采用的涂布方式为:正面先涂布后留白,反面先留白后涂布。故在反面间涂时特别注意设置参数,正面第一段留白对应反面第一段留白,正面第二段留白对应反面第二段留白。
关于反面间涂时的定位对齐:观察留白边缘的“右”边缘线(一定要注意是右边缘线,即靠近烘箱的留白边缘),当正面(下面)边缘线处于反面(上面)边缘线的左边,则说明反面超前(图26);当正面(下面)边缘线处于反面(上面)边缘线的右边,则说明反面滞后(图27)。通过修改“反尾正头补偿值”可以使反面的尾部与正面的头部位置对齐(或者人为地错位)。当反面超前时,增大此参数;当反面滞后时,减小此参数。总结如下方法:拿较细的针尖(防止损坏极片),以靠近烘箱的留白边缘为准,从上往下刺穿极片;如果穿孔扎在下层的涂层上,则表示反面超前,需要增大此参数;如果穿孔扎在下层的箔材上,则表示反面滞后,需要减小此参数。
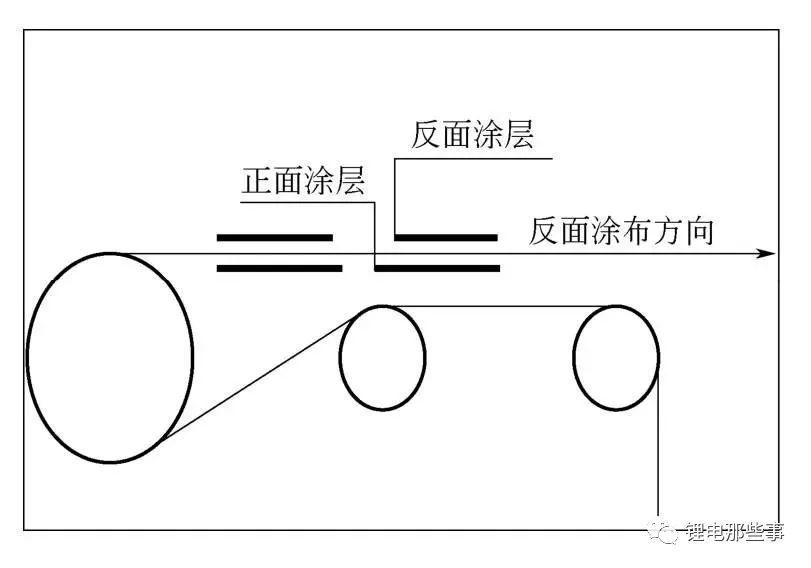
图26 反面超前示意图

图27 反面滞后示意图
一句话总结:减小工艺值或补偿值,则边缘线向烘箱侧移动(假设操作者站在涂布位置),减小即超前动作;增大工艺值或补偿值,则边缘线向操作者侧移动(假设操作者站在涂布位置并面向收卷方向),增大则滞后动作。
4.13 烘箱加热参数
烘箱加热参数如图28所示。

图28 烘箱加热参数示意图
本界面主要设定加热参数用。
①设定温度:用来设定各段烘箱加热的目标温度。
②设定频率:用来设定各段烘箱风机的运转频率,以此来调节送风量,风量与频率成正比。
③手动操作:进入加热手动操作界面,可以针对某一段烘箱单独控制风机与加热器的启停。干燥的速度与风量及温度有关,温度越高则饱和浓度越大,风量越大则单位时间内由风蒸发的溶剂越多。所以风量越大、温度越高则干燥速度越快,但是过快的干燥速度有可能导致极片表面的龟裂,而且过高的温度会导致发热管长期处于工作状态,缩短寿命,浪费能源。故需要根据实际情况调节温度与频率。
4.14 模头参数
模头参数如图29所示。

图29 模头参数示意图
本界面主要设定模头间隙用。
①画面以左侧、右侧、共通三部分布局:左侧显示了对模头左侧部分的操作及参数设置与监控;右侧显示了对模头右侧部分的操作及参数设置与监控;共通显示了对模头整体的操作及参数设置与监控,如设定基准、定位速度、点动速度等。
②实际位置:显示了模头与背辊之间的位移。
③伺服信号:显示了模头精确定位用的伺服状态(绿色为正常,黑色为异常)。
④气缸信号:显示了模头大范围移动用的气缸伸出状态(绿色为伸出,黑色为非伸出)。
⑤前进限位:显示了模头定位伺服前进状态(绿色为正常,黑色为异常)。
⑥后退限位:显示了模头定位伺服后退状态(绿色为正常,黑色为异常)。
⑦光栅脉冲:显示了模头位置检测所用的光栅尺在零位所产生的脉冲数(1P=0.1μm)。
⑧设定位置:设置模头左右相对背辊之间的位置,仅当模头处于伸出位置时有效。
⑨点动前进、点动后退:点动模式下,对定位伺服的操作。
⑩基准位置:设置基准校正时的机械基准位移。
⑪定位速度:设置模头精确定位时伺服移动的速度。
⑫点动速度:设置点动模式下伺服移动的速度。
⑬控制模式:设置模头精确定位伺服的工作方式,手动模式下点动按钮才生效。
⑭模头前进、模头后退、模头定位:和实际的硬件按钮动作一致。
⑮关于模头与背辊之间的位置标定方法,请参考“系统设置”。
4.15 间歇涂布测长参数
间歇涂布测长参数如图30所示。

图30 间歇涂布测长参数示意图
测长显示可以选择图形显示或者数据显示,如图30(a)、(b)所示。当正二反二规格时建议选择数据显示,可以同时显示两段长度;正一反一规格时建议选择图形显示,可以看出涂布尺寸的变化趋势。
①正面涂长偏差:连续显示二十片正面涂布实测长度与工艺值之间的偏差图(单位为mm),底下实测值表示当时一片实测的正面涂布长度,偏差值为当前片的偏差数值。
②正面留白偏差:连续显示二十片正面留白实测长度与工艺值之间的偏差图(单位为mm),底下实测值表示当时一片实测的正面留白长度,偏差值为当前片的偏差数值。
③反面涂长偏差:连续显示二十片反面涂布实测长度与工艺值之间的偏差图(单位为mm),底下实测值表示当时一片实测的反面涂布长度,偏差值为当前片的偏差数值。
④反面留白偏差:连续显示二十片反面留白实测长度与工艺值之间的偏差图(单位为mm),底下实测值表示当时一片实测的反面留白长度,偏差值为当前片的偏差数值。
⑤反尾正头偏差:连续显示二十片反面尾与正面头对齐实测值与工艺值之间的偏差图(单位为mm),底下实测值表示当时一片实测的反尾正头的实测值,偏差值为当前片的偏差数值。
⑥反头正尾偏差:连续显示二十片反面头与正面尾对齐实测值与工艺值之间的偏差图(单位为mm),底下实测值表示当时一片实测的反头正尾的实测值,偏差值为当前片的偏差数值。
⑦涂长平均:显示当前连续三片的涂布长度的平均值。
⑧留白平均:显示当前连续三片的留白长度的平均值。
⑨强制测长功能:正常情况下只有在涂布状态时测长才会启动,如果需要在牵引时也使用测长,则可以启动强制测长功能。
⑩异常报警:当测长的实际数据超过上限或者下限,则系统会报警并产生报警信息。
⑪测长闭环修正系数:当测长闭环功能生效时,控制系统会根据当前实测值与工艺值之间的偏差乘上该系数再补偿到涂布参数的补偿值。假设当前涂布长度工艺值为598mm,补偿值为2.34mm,测长系统测量出来的涂布长度为599mm,那么偏差值为598-599=-1mm;当测长闭环修正系数为1.000时,则补偿量为-1×1.000=-1.000,修正后补偿值为2.34+(-1.000)=1.34mm;当测长闭环修正系数为0.600时,则补偿量为-1×0.600=-0.600,修正后补偿值为2.34+(-0.600)=1.74mm。
⑫闭环样本:假设闭环样本=10,则当测长闭环启用后,系统每测量10片极片进行一次闭环调节。
⑬偏差过滤:当测长闭环启用后,每片测量的偏差值小于偏差过滤值,则认为将该极片的偏差参与闭环计算;否则认为该极片长度异常,不参与闭环计算。
⑭闭环调节:当使用该功能时,正面涂布系统会自动调整正面涂长及留白的补偿值,以使实测值满足工艺要求,只有在正一反一模式时才生效,而且需要测长偏差值在偏差过滤范围内的前提下才会进行参数闭环计算。
⑮开始记录和停止记录:用来开始记录测长数据和停止记录测长数据。
⑯修正值用以补偿系统显示的测长值与操作员用其他工具测量值之间的偏差,比如系统显示测长为602mm,而操作员拿软尺测量的长度为601mm,那么可以将补偿值设为-1mm。
⑰上限和下限用于设置报警范围,超过该范围则报警(异常报警开关打开时)。
4.16 机器参数
机器参数示意图(1)如图31所示。

图31 机器参数示意图(1)
①最大涂布速度:设定允许的最大涂布速度,当技术人员需要严格管控机器的生产速度时,可以设定此值。比如设定为20m/min则在涂布参数内的涂布速度被限制在20m/min以内。
②主传动辊速比:设定烘箱主传动辊自动运行时与整机线速度的速比,一般略大于100%。
③箔材打滑判断值:当运行过程中检测到实际的箔材速度比设定速度低且持续2s以上,则系统报警箔材打滑。
④反面定位缓存:当实际的极片长度小于“反面定位色标传感器到涂布点之间的距离”时,控制系统以缓存的方式定位,这样保证了每一个留白都会对齐。而且在进行多个留白时也会一一对齐(比如正二反二或者正三反三)。
⑤反面定位色标距离:设定正反对齐色标传感器与涂布点之间的物理距离。
⑥张力切换速度:当该值设为0时,收放卷及出料只可设定一个目标张力;当设定值小于或大于0时,则可设定高速及低速张力,根据实际的运行速度,系统会自动切换目标张力。
⑦机器加速度:用来设定自动时的加速度,比如加速度为24m/(min·s),涂布速度为36m/min,则意味着机器从0加速至正常的涂布速度需用时36/24=1.5s。
⑧机器减速度:用来设定自动时的减速度,比如减速度为24m/(min·s),涂布速度为36m/min,则意味着机器从正常的涂布速度减速停止需用时36/24=1.5s。
⑨机器加加速度:用来设定加加速度,比如加速度为24m/(min·s),加加速度为24m/(min·s2),则意味着机器从0加速至最大加速度时需用时24/24=1s。
⑩机器加速类型:T型,表示加速过程是梯形加速(即加速度恒定);S型,表示加速的起始和结束阶段为圆弧过渡,根据加加速度调节时间;E型和S型加速类似,但是整个过程中加速度均是变化的,以自然指数e为相关条件进行加速。
⑪温度阈值:高温,检测到的实际温度高于此值时系统报警高温故障;偏低,当按下涂布按钮时,系统检测到的烘箱实际温度与设定温度偏差大于该值时,会报警提示操作员;停机,当停止加热时所有烘箱温度均低于此值,系统才将风机停止;上限,允许操作员设定的温度最大值。
⑫加热步骤:可以设置加热系统分几次启动加热,每次启动加热之间设置延迟时间。假设总共有10节烘箱,如图所设置启动延时2.0min,分步次数为4,那么按下启动加热按钮后,首先第1、第5、第9节烘箱启动加热;2min后第2、第6、第10节烘箱启动加热;再2min后第3、第7节烘箱启动加热;再2min后第4、第8节烘箱启动加热。
机器参数示意图(2)如图32所示。

图32 机器参数示意图(2)
①机器编号:用来设定该机器的编号,当测长数据保存时会以此编号作为前缀名称,当有两台以上的机器使用测长数据记录功能时,此编号可以防止后续数据混乱。
②MES网络IP地址:用来设定MES系统以太网接口的IP地址(需要按住SET键2s以上生效)。
③MES网络子网掩码:用来设定MES系统以太网接口的子网掩码(需要按住SET键2s以上生效)。
④MES网络默认网 关:用来设定MES系统以太网接口的默认网 关(需要按住SET键2s以上生效)。
⑤MES网络通讯协议:根据所用的主控系统选择设置。
⑥模头定位增益:设置左右模头全闭环定位时的增益,出厂时默认为80,如果系统容易发生震动,则建议将此参数减小。
⑦露点仪量程:若该设备装备了露点仪,则可以设置露点仪输出的电流(4~20mA)所对应的露点温度值(默认对应0~100℃)。
⑧供料液位:设定供料罐液位值。分别设定满液位(100%)所对应的传感器到液面的距离及零液位(0%)所对应的传感器到液面的距离。
⑨涂布压力:设定供料管道上的涂布警告压力,当检测到某一段压力高于此值时系统会提示压力过高警告。
⑩回流压力:设定供料管道上的故障压力,当检测到某一段压力高于此值时系统会提示压力过高故障,此时系统会强制停止供料泵。
⑪过滤压力:浆料传输中过滤网堵塞引起的压力超标,该压力一般与涂布压力和回流压力联控,一般设置为禁用。
⑫DD编码器:方向整定及磁偏角整定。由于DD马达采用了独立的外置编码器,当编码器与背辊之间的相对位移发生变化时(比如,对背辊及编码器进行重新拆装),需要重新整定磁偏角(方向一般不需要重新整定),整定的方法是按住磁偏角整定5s以上,按钮变为绿色,听到背辊DD马达有节奏的叮叮声音,再按住3s以上即可结束。
机器参数示意图(3)如图33所示。

图33 机器参数示意图(3)
本界面参数定义了当前机器的实际参数,在出厂前已经设定好,客户不可更改,否则会导致机器运转不正常。
①背辊直径:背辊的真实直径在出厂时已经设定好,严禁更改。
②背辊最大转速:背辊的最大速度(电机的最大转速/减速比)在出厂时已经设定好,严禁更改。
③主传动辊直径:主传动辊真实直径在出厂时已经设定好,严禁更改。
④主传动辊最大转速:主传动辊的最大速度(电机的最大转速/减速比)在出厂时已经设定好,严禁更改。
⑤主传动辊减速比例:主传动辊减速比例在出厂时已经设定好,严禁更改。
⑥供料泵最大转速:供料泵的最大速度(电机的最大转速/减速比)在出厂时已经设定好,严禁更改。
⑦供料泵减速比例:供料泵减速机减速比在出厂时已经设定好,严禁更改。
⑧压力传感器量程:涂布、回流、过滤这三处压力传感器的量程在出厂时已经设定好,严禁更改。
⑨定长辊直径:定长辊的直径在出厂时已经设定好,严禁更改。
⑩定长辊每圈脉冲:定长辊每转动一圈编码器发出的脉冲数在出厂时已经设定好,严禁更改。
⑪测长辊直径:测长辊的直径在出厂时已经设定好,严禁更改。
⑫测长辊每圈脉冲:测长辊每转动一圈编码器发出的脉冲数在出厂时已经设定好,严禁更改。
⑬烘箱节数:机器实际的烘箱节数在出厂时已经设定好,严禁更改。
⑭排风台数:机器实际的排风台数在出厂时已经设定好,严禁更改
机器参数示意图(4)如图34所示。
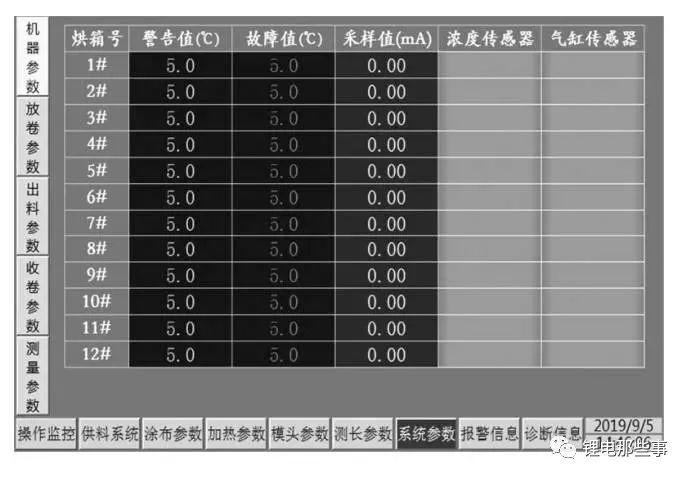
图34 机器参数示意图(4)
本界面参数用来设置机器是否安装了浓度传感器(露点仪),或者烘箱升降的检测传感器。按下灰色的按钮块,则底色变为绿色,则表示该节烘箱的传感器被启用;再按一次,则底色又变为灰色,则表示该节烘箱的传感器被禁用,应该根据实际情况配置。另外,配有浓度传感器的场合,客户可以设定警告值和故障值。当NMP系统联动时且浓度超过了故障值,则系统会停止加热,并禁止涂布。
4.17 放卷参数
放卷参数如图35所示。

图35 放卷参数示意图
①放卷最大转速:放卷电机的最大速度除以放卷减速比例,出厂时已经设定好,严禁更改。
②放卷减速比例:放卷电机输出轴至卷轴之间的减速比,出厂时已经设定好,严禁更改。
③浮辊自重张力:放卷浮辊气压为零时的张力值,出厂时已经设定好,严禁更改。
④浮辊最大张力:放卷电气比例阀输入最大电压/电流时所产生的气压施加到浮辊上的张力,出厂时已经设定好,严禁更改。
⑤浮辊传感器-P:放卷浮辊位置控制算法的比例系数,出厂时已经设定好,严禁更改。
⑥浮辊传感器-I:放卷浮辊位置控制算法的积分系数,出厂时已经设定好,严禁更改。
⑦张力传感器-P:放卷实测张力控制算法的比例系数,出厂时已经设定好,严禁更改。
⑧张力传感器-I:放卷实测张力控制算法的积分系数,出厂时已经设定好,严禁更改。
⑨纠偏传感器-S:放卷纠偏传感器处于零位时,纠偏刻线与放卷过辊中心之间的距离在出厂时已经设定好,严禁更改。
⑩报警器频道选择,音频报警器总共内存了15个频道的音乐,用户可以根据需要设定不同场景下的声音,在试听一栏输入1~15则可分别试听1~15个频道的声音。
⑪卷径范围:设置放卷卷径的变化范围,根据实际的机械设计值设定好,严禁更改。
⑫卷径检测模式:有三种模式,即测量+计算,停止时采用传感器测量,运行时采用计算模式;测量,整个过程中由传感器测量卷径;计算,整个过程中都由PLC计算卷径,在停机状态下,可以人工初始化卷径。
⑬上/下卷径传感器距离:上/下卷径传感器端面至卷轴的圆中心距离在出厂时已经设定好,严禁更改。
⑭张力预紧:始终代表张力预紧动作时放卷电机始终动作,区域则是在张力预紧动作时浮辊在47%~53%之间电机不动作,其余区域电机才动作。
⑮张力控制:选择闭环时系统会实时调节浮辊气压以此达到实际张力等于设定张力,若选择为开环则系统会根据设定的张力计算出一个理论气压给定,然后一直保持不变。
⑯放卷方向:放卷方向在出厂时已经设定好,严禁更改。
4.18 出料参数
出料参数如图36所示。

图36 出料参数示意图
①出料最大转速:出料电机的最大速度除以出料减速比例,出厂时已经设定好,严禁更改。
②出料减速比例:出料电机输出轴至卷轴之间的减速比,出厂时已经设定好,严禁更改。
③张力传感器-P:出料实测张力控制算法的比例系数,出厂时已经设定好,严禁更改。
④张力传感器-I:出料实测张力控制算法的积分系数,出厂时已经设定好,严禁更改。
⑤纠偏传感器-S:出料纠偏传感器处于零位时,纠偏刻线与放卷过辊中心之间的距离在出厂时已经设定好,严禁更改。
⑥出料辊直径:出料辊的直径在出厂时已经设定好,严禁更改。
⑦张力预紧:始终代表张力预紧动作时放卷电机始终动作,区域则是在张力预紧动作时实测张力和目标张力的偏差小于3N时电机不动作,其余区域电机才动作。
⑧张力控制:选择闭环时系统会实时调节浮辊气压以此达到实际张力等于设定张力,若选择为开环则系统会根据设定的张力计算出一个理论气压给定,然后一直保持不变。
⑨出料方向:出料方向在出厂时已经设定好,严禁更改。
4.19 收卷参数
收卷参数如图37所示。

图37 收卷参数示意图
①收卷最大转速:收卷电机的最大速度除以收卷减速比例,出厂时已经设定好,严禁更改。
②收卷减速比例:收卷电机输出轴至卷轴之间的减速比,出厂时已经设定好,严禁更改。
③浮辊自重张力:收卷浮辊气压为零时的张力值,出厂时已经设定好,严禁更改。
④浮辊最大张力:收卷电气比例阀输入最大电压/电流时所产生的气压施加到浮辊上的张力,出厂时已经设定好,严禁更改。
⑤浮辊传感器-P:收卷浮辊位置控制算法的比例系数,出厂时已经设定好,严禁更改。
⑥浮辊传感器-I:收卷浮辊位置控制算法的积分系数,出厂时已经设定好,严禁更改。
⑦张力传感器-P:收卷实测张力控制算法的比例系数,出厂时已经设定好,严禁更改。
⑧张力传感器-I:收卷实测张力控制算法的积分系数,出厂时已经设定好,严禁更改。
⑨报警器频道选择:音频报警器总共内存了15个频道的音乐,用户可以根据需要设定不同场景下的声音,在试听一栏输入1~15则可分别试听1~15个频道的声音。
⑩卷径范围:设置放卷卷径的变化范围,根据实际的机械设计值设定好,严禁更改。
⑪卷径检测模式:有三种模式,即测量+计算,停止时采用传感器测量,运行时采用计算模式;测量,整个过程中由传感器测量卷径;计算,整个过程中都由PLC计算卷径,在停机状态下,可以人工初始化卷径。
⑫卷径传感器距离-A/B:A/B轴卷径传感器端面至卷轴的圆中心距离在出厂时已经设定好,严禁更改。
⑬张力预紧:始终代表张力预紧动作时放卷电机始终动作,区域则是在张力预紧动作时浮辊在47%~53%之间电机不动作,其余区域电机才动作。
⑭转塔角度:转塔角度在出厂时已经设定好,严禁更改。
⑮A/B轴方向:A轴和B轴方向在出厂时已经设定好,严禁更改。
4.20 报警信息
报警信息如图38所示。
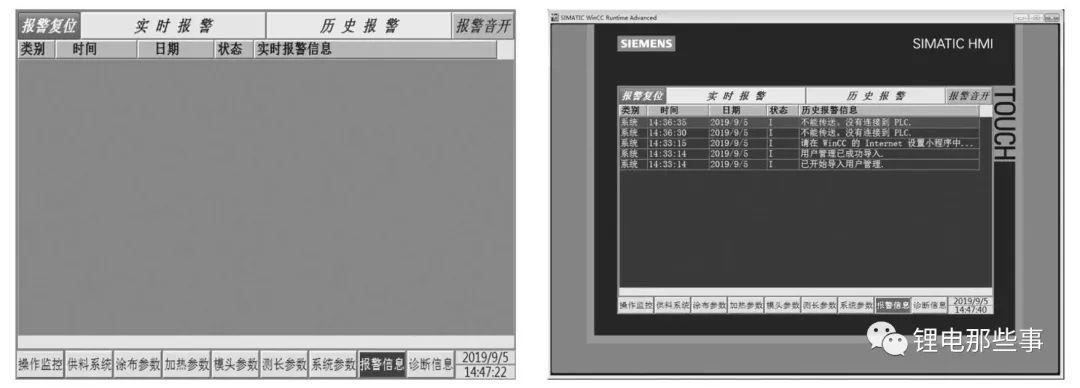
图38 报警信息示意图
①实时报警信息列表:显示了当前系统正存在的故障,只要有故障存在,则“报警复位”按钮会闪烁,同时三色指示灯的红灯会亮起;若有新的故障发生,则收放卷的音频报警器会以铃 声报警。
②历史报警信息列表:显示了系统发生过的故障记录。
4.21 诊断信息
诊断信息如图39所示。

图39 诊断信息示意图
本界面主要显示了控制系统的信号状态。设备维护人员可以很直观地了解到当前一些信号的变化。
间歇阀门累计使用次数一直累计,当更换了备件后,维修人员应该清零当前的使用次数,以便正确地了解每套间歇阀的实际使用寿命。
①正反对齐测长留白长度:显示了在反面间涂时系统测定对应的正面极片的留白长度。
②正反对齐测长留白补偿:用来补偿正反对齐测长留白长度。假设正面设定的工艺留白长度为10mm,而实际显示的正反对齐测长留白长度为8.9mm,那么通过将正反对齐测长留白补偿设定为1.1mm,即可将正反对齐测长留白长度人为地补偿为10mm,以此和正面设定的工艺长度吻合,这在正反面均为多个留白时必须设置。


