虚拟仿真测试介绍:用什么测

“ 本系列尝试从是什么、为什么、测什么、用什么测、怎么测和谁来测等方面来介绍什么是自动驾驶虚拟仿真测试。这是第四篇:用什么测,介绍自动驾驶虚拟仿真测试平台的构成。”
01
仿真测试平台的构成
我们在上一篇《测什么》中用了一张图来概括自动驾驶算法的构成:
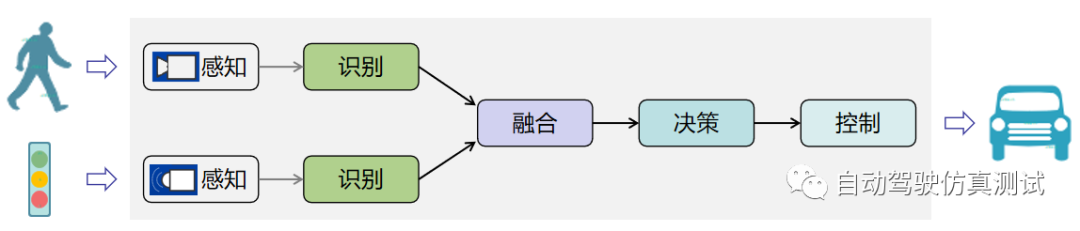
自动驾驶算法通过各种传感器探测周围环境的状态,进行决策后对车辆进行控制。为了在仿真环境对自动驾驶算法进行测试,需要模拟自动驾驶算法的各种输入,并响应其输出,从而“欺骗”它,让它以为在真实世界工作。
为此,对照真实世界,仿真测试平台由交通场景模块、传感器模块、车辆动力学模块和测试管理模块构成。如下图所示:
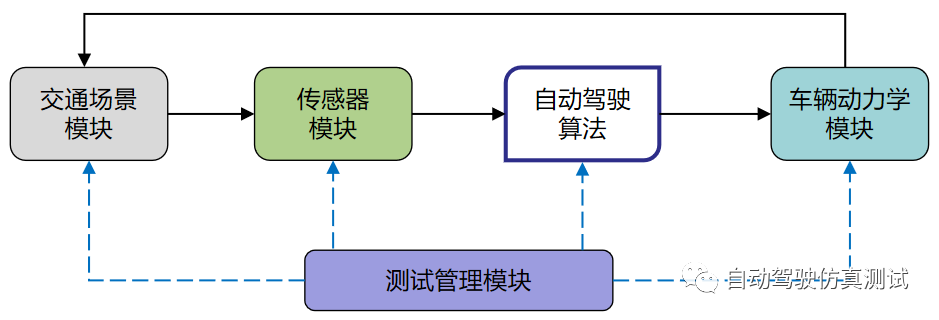
(1)交通场景模块
交通场景模块用于模拟车辆运行的外部世界。
一方面,模拟各种交通场景要素,比如:①高速公路、城市道路等不同的道路结构;②标志标线、护栏、交通灯等道路附属设施;③轿车、卡车、摩托车、行人等交通参与者;④路障、锥桶、遗撒物等临时物体;⑤晴、阴、雨、雪、白天、黑夜等不同的天气。
另一方面,模拟不同交通场景要素之间的组合和动态关系,即不同的“场景”。比如:高速公路上,一辆轿车在被测车辆前方快速切入;十字路口黄灯时,一辆卡车在被测车辆前方紧急制动停车。
(2)传感器模块
传感器模块用于模拟车辆上安装的各种传感器,从而获得交通场景的状态。
一方面,根据传感器种类的不同,模拟不同的信号内容,比如:摄像头传感器输出图像信号,激光雷达传感器输出点云信号,导航传感器输出定位信号。
另一方面,根据传感器特性和参数的不同,模拟出其“局限”,比如:传感器的探测范围,摄像头的畸变和炫光,不同材质对激光雷达光线吸收的影响,护栏对毫米波雷达的杂波影响。
(3)车辆动力学模块
车辆动力学模块用于模拟车辆本身对自动驾驶算法控制的响应,特别是对加速、制动和转向的响应。
车辆动力学模块一般参照真实车辆,由车身、动力传动系统、悬架系统、转向系统、制动系统和车轮等不同的子系统构成。
(4)测试管理模块
测试管理模块,负责对以上三个部分组成的仿真测试环境的管理,保证仿真测试的效果和效率。
一方面,对测试流程进行管理,比如:测试用例的选择、测试的启动和终止、仿真模块的调度。另一方面,对测试数据进行管理,比如:测试用例的更新、测试数据的记录和分析、测试报告的生成。
02
仿真测试工具的流派
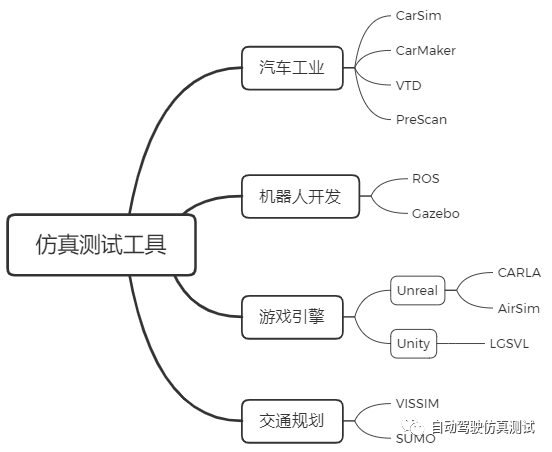
目前常见的仿真测试工具有很多种,根据自动驾驶开发团队的来源,大致可分为如下几个流派:传统主机厂倾向于使用汽车工业的商业软件,使用机器人平台开发自动驾驶算法的团队常常使用ROS/Gazebo,很多擅长计算机图形学的团队基于游戏引擎开发仿真工具。而大规模复杂交通流的仿真需求,则由交通规划领域的软件来满足。
下图列举了一些常见的工具:
03
仿真测试工具的选择
如上一篇《测什么》中所说,一个完整的、精度高的仿真测试平台自然是最终的目标,但是在实际的自动驾驶开发中,团队一定会根据当下的具体需求和成本限制进行选择。
比如:是否需要高精度的传感器模型?如果想采用VISSIM等工具模拟区域交通流,是否有合乎实际的交通调查数据?自动驾驶算法测试使用的车辆动力学模型,是否要与底盘调 教的车辆模型使用一样的精度?高保真的视觉场景是否满足测试效率的要求?成熟的商业软件是否满足特定的需求?采用开源软件的话,团队的能力和项目进度是否允许?
等等诸如此类的问题,都需要根据不同的实际情况仔细评估后,再做选择。


