虚拟仿真测试介绍:谁来测

“ 本系列尝试从是什么、为什么、测什么、用什么测、怎么测和谁来测等方面来介绍什么是自动驾驶虚拟仿真测试。这是第六篇:谁来测,介绍自动驾驶虚拟仿真测试的工作分工。”
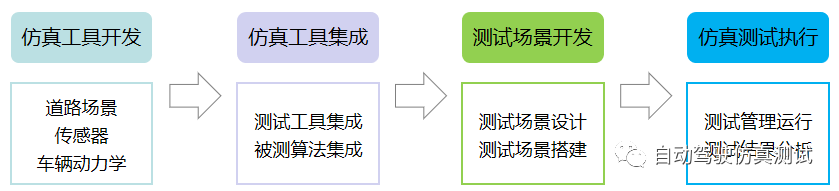
对照《用什么测》和《怎么测》中的描述,完整的自动驾驶仿真测试可以分为仿真工具开发、仿真工具集成、测试场景开发和仿真测试执行等工作,如下图:
01
仿真工具开发
由于仿真工具开发难度较大,且模块的功能有较明显分隔,目前仿真工具一般由多家公司提供。比如VTD、PreScan是常用的场景和传感器模仿真软件,CarSim是常用的车辆动力学仿真软件,ECU-TEST是常用的测试管理工具。
仿真工具开发需要跨领域的能力。比如激光雷达传感器的开发,不仅要求对激光雷达工作原理的理解,而且需要对应的编程开发能力,初步开发完成后还需要真实激光雷达试验数据的对标调整。而这种跨领域的能力,可以通过不同领域人才的合作,也可以通过拥有跨领域知识的人才来提供。
从事仿真工具开发的公司一般为乙方,技术积累较深厚,目前主要为国外企业,特别是德国和美国企业居多。近些年也有一些国内公司开发的相关工具,比如51Sim-One、PanoSim和Hirain TAE。另外,一些互联网背景的自动驾驶公司也在开发自己的仿真工具。
02
仿真工具集成
仿真工具集成包含两个方面的工作:(1)根据测试需要选择合适的测试工具并将其集成为完整的仿真测试环境;(2)将被测算法与仿真测试环境集成,实现闭环测试。
第一方面工作的难点在于:(1)市场上的测试工具种类较多,哪个能满足测试需求?(2)这些测试工具多是由不同公司开发的,在将其集成到一起时,相互之间的数据接口需要定制化开发。
第二方面工作的难点在于:(1)现成的工具与被测算法的数据接口也不一致,在定制化开发通信接口的过程中,既需要创造性的思考,也需要步步为营的调试。(2)如何能够保证仿真环境与真实环境的相似度,比如传感器的信号是否与真实情况一致、车辆动力学模型的响应是否与真实车辆一致?
从事仿真工具集成工作的公司一般为乙方,其为不同甲方提供解决方案、使用不同仿真工具的过程,为其解决相似问题提供了宝贵经验、降低了成本。目前该领域的集中度较高,但也不断有创业公司进入,竞争较为激烈。
03
测试场景开发
在前面的《怎么测》中提到了针对高等级自动驾驶的测试方法要从测试用例向测试场景转变,也提到了测试场景的来源。测试场景开发工作的一个关键问题是:如何保证仿真测试的场景覆盖度?或者算法在仿真环境进行了1000万个场景、1000万公里的测试后,我们可以有多大信心在真实世界的同样场景下进行自动驾驶?
这需要针对自动驾驶算法的设计运行域详细而系统的进行测试场景设计。充分考虑道路、周围车辆的位置和运动、传感器感知局限和自车状态等等不同方面的影响。
在场景设计完成后,需要在仿真环境下搭建。这可能是一个枯燥的工作,但是在考虑是否能够自动生成、如何避免手工搭建的错误等等内容时,亦需要智慧的思考。
这部分工作一般需要算法开发公司(可能是整车厂,也可能是其供应商)的测试团队来完成,并与算法开发团队密切沟通。对于相关技术薄弱的公司,也可能找供应商来提供测试服务。
04
仿真测试执行
仿真测试执行包含两个方面的工作:(1)对测试场景库的维护和针对不同算法或功能合适的测试场景进行运行测试;(2)在测试完成后,整理并提供清晰的测试报告,并对测试结果进行统计,为算法团队的改进提供有效支撑。
至此“虚拟仿真测试介绍”系列终于完成。
谢谢您宝贵的正激励和正反馈!
关键词:自动驾驶, 虚拟仿真测试,simulation,virtual test,mil,sil,hil


