虚拟仿真测试介绍:仿真测试的不同层次

自动驾驶汽车决策过程如下图所示:由各种传感器感知环境状态,并发送给控制器;控制器融合各种传感器的信号,并根据功能和算法的定义给出控制指令;最终由车辆上的执行器执行,使得车辆自动行驶。
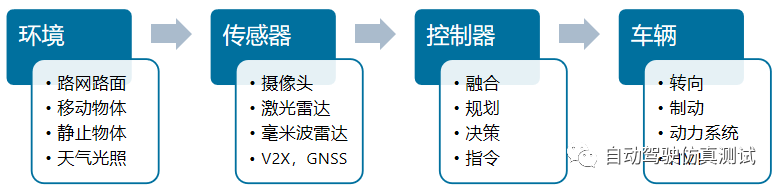
根据上述提到的环境、传感器、控制器和车辆四种元素的状态的不同(是否用真实部件),可以进行不同层次的仿真测试。

01
层次一
这个层次的仿真测试,没有真实的部件,一般称为模型/软件在环测试,主要测试内容为自动驾驶的控制算法。其结构如下图所示:

自动驾驶算法可以是Simulink模型的格式,也可以是C/Python等代码的格式。虚拟场景和传感器由VTD、PreScan等场景仿真软件提供。虚拟车辆由CarSim、veDYNA等车辆动力学软件提供。可以在PC环境中运行三者的联合仿真,进行测试。
其中的虚拟传感器可以采用理想传感器,发送真值数据;也可以采用复杂传感器,考虑到激光雷达、毫米波雷达等不同传感器的特性,发送带误差的数据。
02
层次二
这个层次的仿真测试,控制器采用真实部件,这个真实部件可以是量产版的部件或者快速原型机,也可以是近来自动驾驶开发经常使用的工控机。一般称为硬件在环测试。其结构如下图所示:

场景仿真软件和车辆动力学软件一般在实时仿真机运行,用来保证运行的实时性。自动驾驶控制器中包含自动驾驶算法,并通过硬件接口板卡(如CAN板卡、以太网板卡)与实时仿真机相连,进行车辆状态、传感器信号和控制指令的交互。其中,传感器信号需要按照实车上使用的接口和协议进行发送。
对于使用工控机的情况,或者其他实时性要求不是太高,而且通信接口可以满足测试需求的情况,也可以使用PC作为场景仿真和车辆动力学软件的运行环境。
03
层次三
这个层次的仿真测试,相比上一层次,部分传感器采用真实部件:

一般称为硬件在环测试。其结构如下图所示:
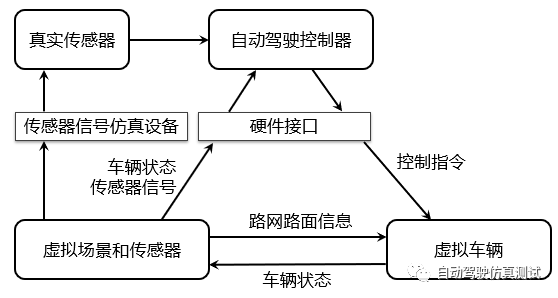
与上一层次相比,部分传感器使用真实部件,将场景仿真软件中的虚拟传感器的信号发送至传感器信号仿真设备,进而由传感器信号仿真设备发送传感器信号,影响真实传感器的输出。
值得注意的是,这一层次中部分传感器使用真实部件,大多情况下并不是要对传感器的真实部件进行测试,而是因为供应商不能提供该传感器输出信号的协议,从而不能仅仅使用虚拟传感器进行信号仿真。
04
层次四
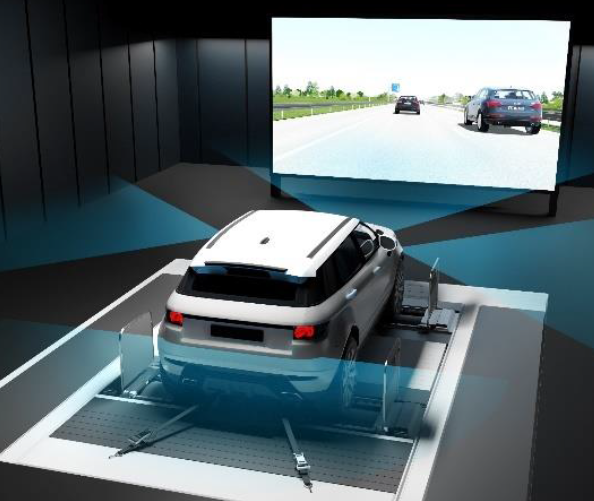
这个层次的仿真测试,相比上一层次,车辆更改为真实车辆,将真实车辆置于转鼓试验台上进行测试,故一般称为车辆在环测试。或者以驾驶模拟器的形式体现,称为驾驶员在环测试。这一测试的好处是具有真实的执行器和传感器,可以在试验室中制造多样的环境状态(比如雨、雾、强光等)进行测试;另外由于具有真实的座舱,可以对人机交互/HMI等功能进行测试。
其结构如下图所示:

场景仿真和车辆动力学仿真软件联合仿真,以真实车辆反馈的轮速、车轮转角等作为输入,输出行驶阻力和转向阻力,通过转毂试验台反馈给真实车辆,实现闭环测试。这其中的难点在于行驶阻力和转向阻力模拟的真实性。
该层次的一个示例如下图所示:
05
层次五
这个层次的仿真测试,相比上一层次,不再将真实车辆置于转鼓试验台上,而是使用真实车辆在真实的道路上行驶,故一般也称为车辆在环测试。其结构如下:

由于车辆在运动过程中,不再使用传感器信号仿真设备,而是仅使用场景仿真软件仿真传感器信号(有时也使用部分真实传感器,并布置真实交通物体),并通过硬件接口板卡发送给控制器。这一层次仿真的好处是,使用真实车辆在真实道路上行驶,车辆动力学特性完全真实;而且,交通物体的状态通过虚拟传感器模拟,不会发生碰撞等危险情况,从而可以对一些危险场景进行测试。
该层次的一个示例如下图所示:

最后谢谢您宝贵的正激励和正反馈!
|本文作者版权所有,未经授权不得转载。
关键词:自动驾驶, 虚拟仿真测试,simulation,virtual test,mil,sil,hil


