自动驾驶虚拟仿真技术(一):自动驾驶虚拟仿真概述


自动驾驶仿真测试,是计算机仿真技术在汽车领域的应用,它以数学建模的方式将自动驾驶的应用场景进行数字化还原,建立尽可能接近真实世界的系统模型。
通过仿真测试进行分析和研究,便可以达到对自动驾驶系统和算法进行测试验证的目的。

图 1 自动驾驶虚拟仿真
一、自动驾驶仿真测试的意义
联合国世界车辆法规协调论坛(UN/WP.29)自动驾驶与网联车辆工作组(GRVA)针对自动驾驶功能提出“多支柱法”,结合审核与审计、仿真测试、场地测试与真实道路测试等多种不同方法来支撑自动驾驶功能的评价。
场地测试与真实道路测试均属于传统测试技术,要求使用真实车辆在真实世界进行测试,在场景覆盖面及测试效率上存在较大局限。在此背景下,仿真测试技术可从以下两个方面补充实车测试的不足之处:
1、可以模拟真实世界中出现概率极低的危险场景,从而可以使自动驾驶系统在更加丰富和复杂的场景中进行高频度的有效测试验证,在保障安全高效的前提下实现更充分的测试验证效果,提高自动驾驶功能开发和测评的可靠性;
2、通过对实车测试数据进行复现和泛化,不仅能够更加有效和深入地分析实车测试过程中的问题,进行针对性优化,而且可以更加精准地约束测试条件,提升测试效率,缩短功能开发和测试周期。
二、自动驾驶仿真技术类型
按照测试方式不同,自动驾驶仿真测试可分为5类:模型在环(MIL)、软件在环(SIL)、硬件在环(HIL)、驾驶员在环(DIL)和车辆在环(VIL)。
1、模型在环(MIL)
在系统开发阶段,需要建立算法模型并进行仿真测试,根据仿真测试结果,不断优化系统设计。这个阶段的仿真通常被定义为模型在环。
在自动驾驶仿真中,通常需要进行模型在环仿真的算法有包括视觉、雷达、高精地图、定位、多传感器融合等感知算法,及规划、决策乃至执行算法。

图 2 模型在环MIL
2、软件在环(SIL)
在完成模型在环测试后,对算法模型进行代码转化,形成代码,同样需要对代码进行仿真测试,进行代码与算法模型等效性测试,保证代码与算法模型一致。该阶段测试通常被定义为软件在环。
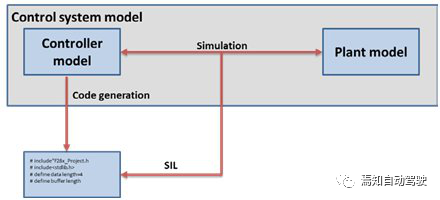
图 3 软件在环SIL
3、硬件在环(HIL)
提供可以模拟真实的系统环境的动态系统模型作为“受控设备仿真”,并通过嵌入式系统的输入输出将其与仿真系统平台相连,形成闭环。硬件在环测试的目的是为了验证控制器。

图 4 硬件在环HIL
4、驾驶员在环(DIL)
在对车辆、发动机等系统进行仿真的基础上,在保证测试精度的前提下,增加了交通和环境的仿真,并将真实驾驶员引入仿真测试闭环,融合传感器仿真技术,结合 3D 实时动画,对系统进行验证。

图 5 驾驶员在环DIL
5、车辆在环(VIL)
将测试系统集成到真实车辆中,并通过仿真平台模拟道路、交通场景以及传感器信号,从而构成完整测试闭环。车辆在环测试的目的是验证测试系统功能、各场景仿真测试、与整车相关电控系统的匹配及集成测试。

图 6 车辆在环
三、自动驾驶仿真测试原则与难点
1、仿真测试原则
自动驾驶仿真测试最重要的三项原则为:全面性、真实性和可重复性。
全面性
指仿真测试的测试场景应能充分覆盖 ODD 和边界场景,并且能用多种测试方法对被测功能的全部层级在不同开发阶段进行测试。
真实性
指仿真测试的场景参数应基于实际,逻辑参数设置合理,并且测试输出结果应与实车测试保持基本一致。
可重复性
指仿真测试中的同一测试用例的在同一测试平台多次测试结果应保持高度一致,在不同测试的平台的测试结果的偏差应符合设计要求。
2、自动驾驶仿真技术难点
现阶段自动驾驶仿真技术尚未成熟,存在以下主要问题和难点:
相同算法在多样化仿真平台测试验证结果的一致性问题
如何保障 SIL、HIL、DIL、VIL 仿真测试结果一致性
如何保障不同仿真工具链测试结果一致性
如何保障仿真模型精度在不同平台中的一致性
仿真测试与实际测试结果的一致性问题
如何保证仿真模型与实际被测件的标定真实性和特性匹配
如何保证仿真测试各系统之间交互反馈时钟同步与实际测试的一致性
仿真测试过程的问题回溯机制
如何根据仿真结果,快速追溯并确认仿真测试过程中某一模块是否出现问题
仿真测试评价标准的多样化问题
如何评估安全性、稳定性等普通衡量标准
如何评估舒适性、通过性等难以衡量的标准
测试场景的针对性问题
如何针对被测驾驶自动化系统筛选相应的测试场景
如何快速迭代特定测试场景以测算验证被测系统的性能
四、自动驾驶仿真软件
目前行业上有应用的自动驾驶仿真软件是百花齐放、五花八门,常见的有PanoSim、PreScan、Carmaker、51VR、VTD、CARLA等。
1、PanoSim

图 7 PanoSim
PanoSim是新一代自动驾驶模拟仿真软件,专注于通过模拟仿真技术实现汽车虚拟研发的一体化化工具与平台。PanoSim 集高精度车辆动力学模型、汽车行驶环境模型、车载环境传感模型与交通模型等于一体,可与 Matlab / Simulink 无缝链接并支持离线与实时仿真功能。
PanoSim 不仅包括复杂的车辆动力学模型、底盘(制动、转向和悬架)、轮胎、驾驶员、动力总成(发动机和变速箱)等模型,还支持各种典型驱动型式和悬架形式的大、中、小型轿车的建模以及仿真分析。它提供了三维数字虚拟试验场景建模与编辑功能,支持对道路及道路纹理、车道线、交通标识与设施、天气、夜景等汽车行驶环境的建模与编辑。
2、PreScan

图 8 PreScan
PreScan是一款基于物理模型的仿真平台,最初用于驾驶辅助、驾驶预警、避撞和减撞等功能的前期开发和测试,现也可用于自动驾驶系统的开发。
PreScan可支持多种类型传感器的模型建立与设置,包括鱼眼摄像头、单目摄像头、双目摄像头、毫米波雷达、激光雷达、超声波雷达、V2X 通讯传感器、车道线传感器、目标物体识别传感器等。
PreScan可以对道路模型进行设置与编辑,具备道路数据库设置坡度、曲率、侧倾、高架等,具备参数化得路面模型,支持自动化测试,支持非铺装路仿真,支持第三方地图 OSM/OpenDRIVE 高精地图导入;可以搭建环境模型,包括路面及路边设施数据库、交通标志数据库、建筑物、绿化带数据库、支持用户自定义 3D 模型导入;支持道路使用者的创建、编辑,包括轿车和摩托车、商用车、行人及自行车、测试用气球车等;支持天气、光照等天气条件的搭建,包括创建白天、黑夜雨雪雾天气、设置车灯及路灯等,光照模型具有传感器响应特性。
3、Carmaker

图 9 Carmaker
Carmaker 首先是一个优秀的动力学仿真软件, 提供了精准的车辆本体模型(发动机、 底盘、 悬架、 传动、 转向等) , Carmaker 的车辆模型与 Carsim 精度一致,将车辆比作多体-非线性系统,并根据车辆子系统进行了清晰的设置(例如转向系统的Pfeffer 模型、制动系统模型、发动机模型)。
CarMaker具有开放性的毫米波雷达、摄像头、激光雷达、超声波雷达等多个高精度传感器模型。在场景模拟方面,Carmaker可模拟不平坦的道路(例如减速带、坑洼),可从 HERE 地图直接导入真实道路环境;驾驶人模型可定义其驾驶风格(激进型、稳健型),可支持复杂的驾驶操作,并具有学习功能,可适应不同的车辆、道路特征;交通流模型可定义几乎无限数量的交通参与者,每个参与者都可添加动力学模型,并可根据事件对参与者进行精细控制。
CarMaker 作为平台软件, 可以与很多第三方软件进行集成, 如 ADAMS、 AVLCruise、 rFpro 等, 可利用各软件的优势进行联合仿真。同时 CarMaker 配套的硬件,提供了大量的板卡接口, 可以方便的与 ECU 或者传感器进行 HIL 测试。
4、51Sim-One

图 10 51VR
51Sim-One是 51VR 自主研发的一款集多传感器仿真、交通流与智能体仿真、感知与决策仿真、自动驾驶行为训练于一体的自动驾驶仿真与测试平台。51Sim-One 内置了一系列场景库和测试案例库,包括开放区域真实场景、大规模城市道路、乡村道路、高速公路、停车场等。
51Sim-One可以通过 WorldEditor 快速地从无到有创建基于 OpenDRIVE 的路网,或者通过点云数据和地图影像等真实数据还原路网信息。51VR 支持在场景中自由地配置全局交通流、独立的交通智能体、对手车辆、行人等元素来构建动态场景,结合光照、天气等环境的模拟来呈现丰富多变虚拟世界。
5、VTD

图 11 VTD
VTD 目前运行于 Linux 平台, 它的功能覆盖了道路环境建模、 交通场景建模、 天气和环境模拟、 简单和物理真实的传感器仿真、 场景仿真管理以及高精度的实时画面渲染等。
VTD支持物理级复杂传感器建模仿真,类型包括视频、超声波雷达、毫米波雷达和激光雷达等。
VTD 采用 OpenDRIVE、OpenCRG 和 OpenSCENARIO 标准,便于虚拟环境的重建和测试场景的开发。VTD支持 OpenDRIVE 格式高精地图的导入,并基于此完成虚拟世界和环境的重建,现对道路和环境的模拟。具备或可扩展丰富的道路元素库,包括道路、交通标志、路面标线、交通灯、道路附属设施、道路周围建筑和树木等交通环境要素模型库;支持复杂路网快速建模,可以设置不同道路形态的模型,具备车道级数据的应用能力;支持交通仿真和真实工况的导入,支持和第三方车辆动力学软件的集成。
6、CARLA

图 12 CARLA
CARLA是由西班牙巴塞罗那自治大学计算机视觉中心指导开发的开源模拟器,CARLA提供了开源代码和协议,以及为自动驾驶创建的开源数字资源(包括城市布局、建筑以及车辆)。
CARLA平台能够支持传感套件和环境条件的灵活配置。支持不同天气状况,如晴天、雨天、雨后和晴朗等;支持不同传感器模式,如正常摄像头视觉、真实深度和真实语义分隔;提供测试场景资源库,包含 40 座不同的建筑,16 个运动汽车模型和 50 个行人模型。


