车道保持系统的基本功能和工作原理
车辆安全驾驶技术有两个关键点,一是保障本车不与前车碰撞,二是保障本车在自己的车道上行驶,不偏离到其他车道上。当然还有其他安全驾驶技术,但根据权威统计,这两点技术如果能做到位,发生安全事故的概率会明显变小。
车道保持系统用于帮助司机使车辆一直保持在规定的某个车道上行驶,车辆不偏离车道(见图1)。
如果车辆行驶偏离自己的车道,车道保持系统会让转向系统自动纠偏。在前车窗内侧的上方,安装一个摄像头(见图2)。摄像头能看清车道线,形成清晰的图像。在计算机的帮助下,通过一定算法,判断出车辆是否在规定车道内 。如果偏离车道(左右偏离),计算机会给出报警信号和纠偏指令。摄像头成像(这是传统技术)是基本要求,对图像扫描后,形成数字信号,这是比较关键的技术,接下来关键的是计算机芯片(处理器)的计算速度和存储器容量大小。
通俗的讲,摄像头要满足车用要求,车辆是高速运动的,摄像头拍的照片要清晰,计算机芯片(处理器)也必须是专业级。注意:道路上要划分出车道是基础,其车道线清晰度的要求,符合国际标准ISO 17361和GB/T26773-2011。
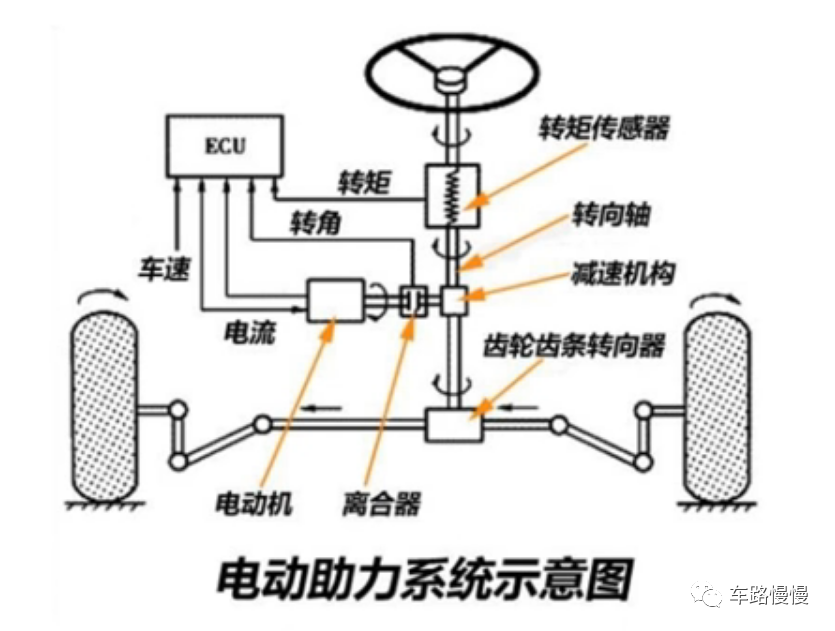
车道保持系统基本结构分为:环境感知、控制和执行系统。通过摄像头的画面的处理,得出当前车辆相对车道线的位置,偏离的方向和速度,当车辆靠近识别出的边界线且要驶离该车道时,系统会通过声音和图像对司机进行提醒。其控制策略:Ⅰ)如果车辆压过车道边界线之前,操纵了转向拨杆(转向灯亮了),那么就不会出现警告信号。这时该系统认为,是司机的正常车道变换驾驶。Ⅱ)在车辆靠近车道边界线,系统会出现一次警告信号;Ⅲ)在第一次警告出现后,车辆前轮远离对应的车道边界线,随后后轮也靠近边界线时,系统会就发出第二次警报。这样,就可防止车辆在与车道边界线平行行驶时持续出现这种警告。Ⅳ)系统在发出告警信号的同时,发出辅助控制(纠偏)命令是有前提条件的,即驾驶员没有打转向灯并且没有操作方向盘的情况下,车辆发生了车道偏离且车辆速度达到一定规定(乘用车一般约定为65公里/小时)时。注意:如果驾驶员在操作方向盘,则系统认为驾驶员是正常、有意图的驾驶行为,系统不会对转向系统予以进行控制。接到决策系统的辅助控制命令时,由ESP系统或电机输出转向助力,使得车辆保持在道路内行驶。控制执行系统逻辑示意图见图4。转向助力的大小和时长,由车道半径、车速、偏离方向、偏离速度等参数(由不同传感器给出,由计算机计算出来)控制执行系统的电控转向机构原理见图5。这是一个负反馈平衡系统。步进电机、转矩传感器、电机控制器。外加电源线和信号和控制线缆。a)车道保持系统是用于高速公路和路况良好的普通公路的,因此该系统只有在车速超过约65 km/h时才开始工作。(如果用户有要求,按用户设定,比如公交公司最高限速是50公里)。b)如果车道被雪覆盖着、道路过窄或者道路边界线不清晰的情况下,车道保持系统会自动关闭。①车道保持辅助系统属于智能驾驶辅助系统的一种,它是在车道偏离预警(LDW)系统的基础上对转向控制协调装置进行控制。在换道前,必须打转向灯。③如果是园区(码头)、企业物流车辆,再另外设置参数即可。 著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-06-21
最近编辑:1年前