关于自动驾驶汽车的一切,非技术专业人员也能看懂

本文是工程师Aman写给非技术人员有关自动驾驶的核心概念,向非技术专业人员解释了自动驾驶的尖端技术,语言通俗易懂,内容深入浅出,包含从“深度学习”到“计算机视觉”的所有内容。
读完本文,您将对无人驾驶汽车技术有足够的了解,能够与这些领域的工程师对话。诸如“人工神经网络”之类的词听起来不再像魔术或科幻电影中的东西。
相机,这是最重要的(简单的2百万像素相机可以正常工作)
雷达。它们会向周围发射无线电波,就像超声波一样,您会检测到从物体反弹并返回的无线电波
激光,虽然很酷,但如今它们非常昂贵,并且在下雨或有雾时它们不起作用。也称为“激光雷达”。您可以说它们就像雷达,但可以提供更好的图像质量,并且激光可以走得很远,因此您的视野更大。激光通常放置在汽车顶部的旋转轮中,因此它们旋转得非常快,看着周围的环境。

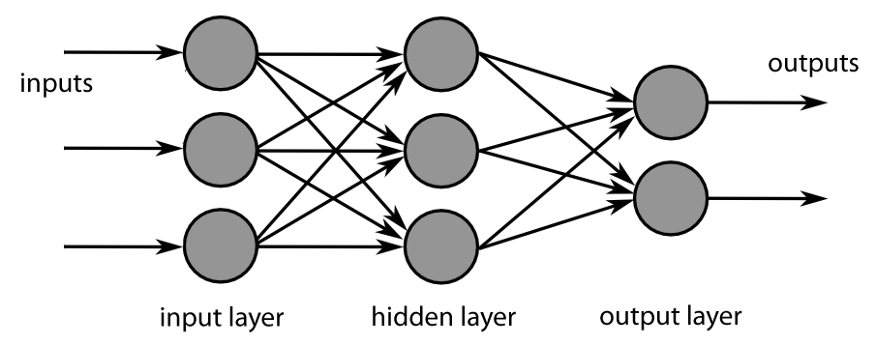
为像我自己这样的黑猩猩解释了深度学习




在所有其他方面都相似的情况下,驾驶数据是开发自动驾驶汽车竞赛中最大的获胜因素。
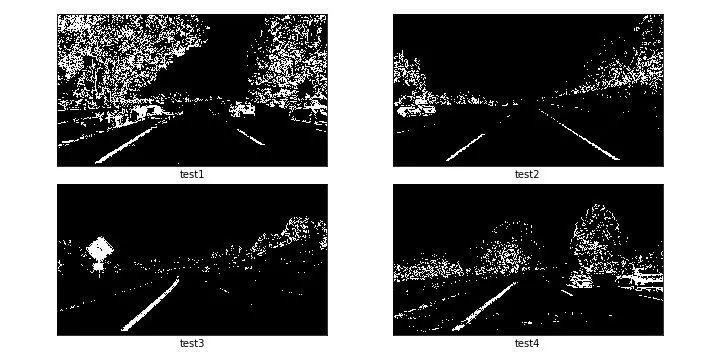
计算机视觉

机器人与导航
好的!现在您应该对自动驾驶汽车的工作原理有个很好的了解。这是我们学到的:
深度学习-作弊代码,平衡训练数据,过度拟合等问题,为什么深度学习是“黑匣子”等。
计算机视觉-相机,雷达和激光雷达传感器,立体视觉,如何创造性地处理图像以提取许多不同类型的信息,这里有一个流行的编程库,称为OpenCV。
机器人技术-什么是执行器。
导航-您了解到,除了GPS和存储的地图等之外,汽车还使用了一种称为“航位推算”的Sherlock Holmes式技术。
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-06-21
最近编辑:1年前

硕士
自动驾驶仿真工程师一枚

相关推荐
最新文章
热门文章
