电机电控联合仿真
前 言
在新能源汽车迅猛发展的今天,作为一名驱动系统工程师,无论是做设计、参数匹配还是销售人员,都需要对电机以及控制做一些了解,本文从电机与电控联合仿真入手,用通俗易懂的语言来解释驱动系统仿真领域的一些知识。文中着重阐述以下内容:电机常用的控制方法介绍
控制模型的搭建与解读
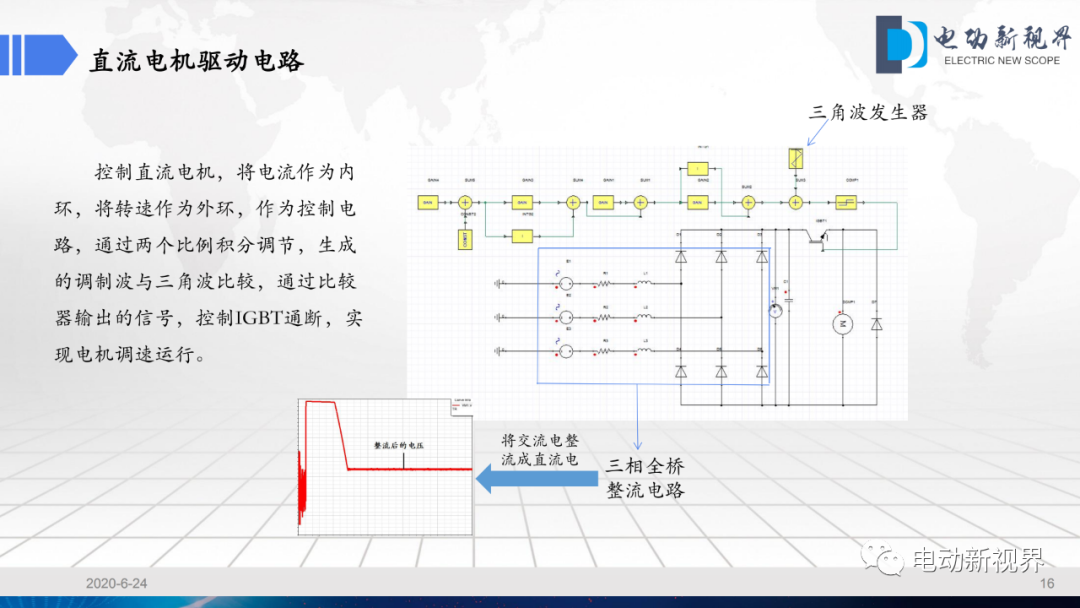
直流电机如何了联合仿真控制
基于路算的永磁电机和控制方法联合仿真
基于有限元的永磁电机和控制方法联合仿真
双闭环控制仿真
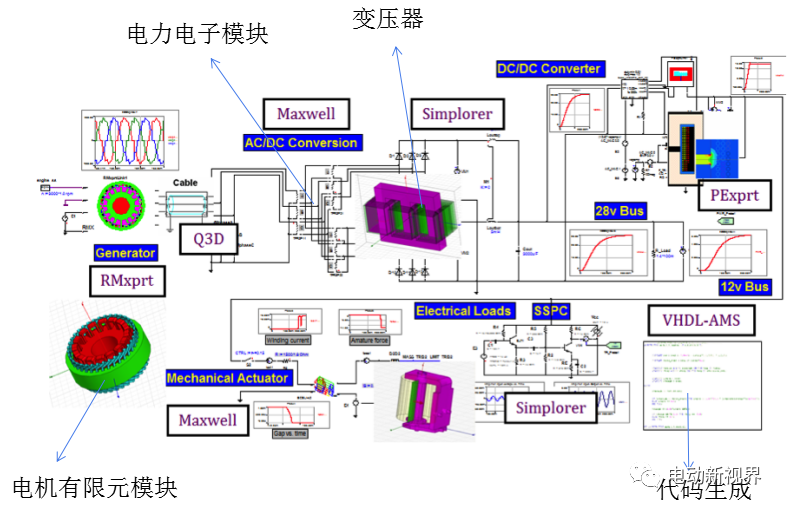
联合仿真简介
ANSYS Electronics Desktop为ANSYS旗下电磁仿真软件,包括ANSYS Maxwell(低频电磁场仿真)、ANSYS HFSS(高频电磁场仿真)、ANSYS Simplorer(系统设计仿真技术)等,可以对几乎所有电磁场工程进行准确仿真与优化。永磁同步电机控制方式介绍
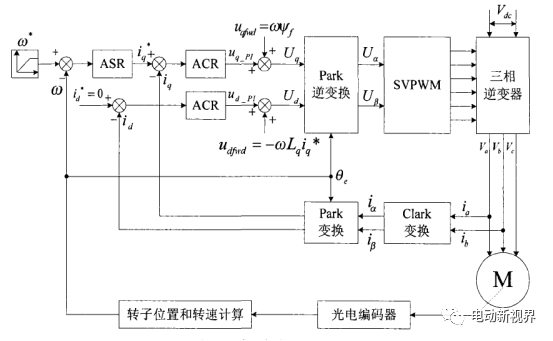
根据永磁同步电机的应用场合不同,有几种用得比较多的磁场定向控制方式:控制架构图▲
答:我们把三相电流通过坐标变换,转换成旋转坐标系下的直流分量,这个直流分量中,有一个方向的电流会产生转矩,那么,我们可以将全部电流幅值全部加到这个方向上,将另一个方向的电流幅值设置为0,即Id=0的控制。 答:我们知道,在控制系统中,你想控制一个随时间变化的交流量可不是一件容易的事情,那么你想控制一个常数的变化(等价直流),相对容易一些,这就是为啥要进行坐标变换的原因。磁场定向控制时的时间向量图▲
答:电机转子磁路中,有的会出现一些磁阻转矩,这个时候,就要寻找一个合适的DQ电流相位,目的是用最小的电流激发出电机最大的转矩。即MPTA控制。 答:就是找出一个曲线上离坐标原点最近的一根直线。这个曲线上的任意点对转矩的贡献相同,同时,这样的曲线由于不同转矩的需求,是一个曲线簇,在每一条曲线上都有一个最短的点,这样就构成了MPTA轨迹(如图所示)。凸极式定子电流轨迹矢量▲
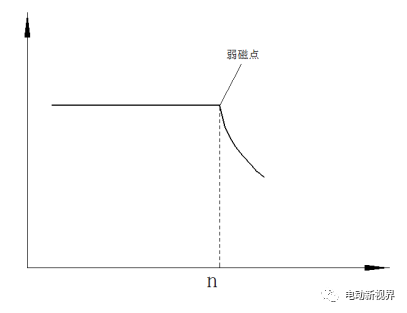
简单的说,转速高了,不弱磁电机电流就灌不进去,就无法输出功率。 高转速下,电机永磁体提供过高的反电势,这个电势高于供电电压的话,那就成发电机了。所以,这就是为啥要弱磁。 使用电流产生磁场将转子反电势压下去,让电流能灌进来。这也是为啥弱磁后转矩下降的原因,因为有一部分电流要去和转子磁场平衡,来为电流能流进电机做保障。关于各种控制,书上很多解释,可参考任意一本电机控制的书籍。
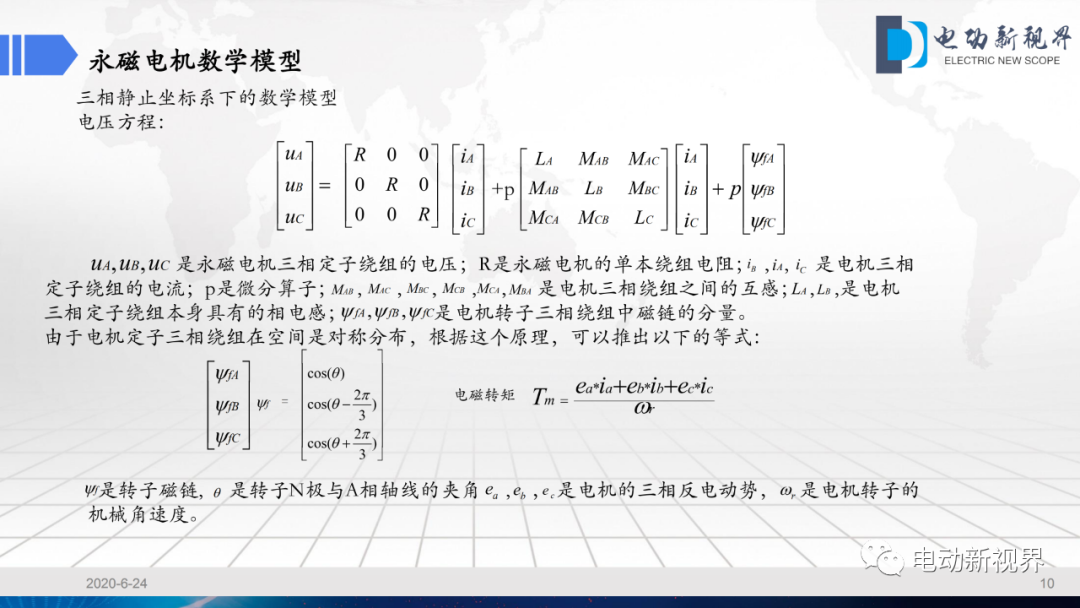
永磁电机数学模型
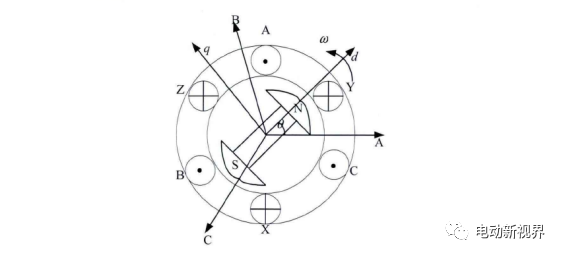
永磁同步电机定子上装有三相交流相位相差120度的对称绕组,而转子安装的是永磁体,他们之间通过气隙磁场来强耦合,控制对象的数学模型应能够准确反应系统的动静态特性。由于定转子之间电磁耦合的复杂性,对永磁电机做出假设:
(1)忽略铁心的铁耗。
(2)忽略电机绕组的电感和电阻参数的变化。
(3)忽略铁心的饱和现象。
(4)转子上无阻尼绕组(无阻尼作用)。
(5)忽略磁场产生的高次谐波,定子电流产生正弦变化(在空间相差120度电角度且完全对称)。
电动机的物理模型▲

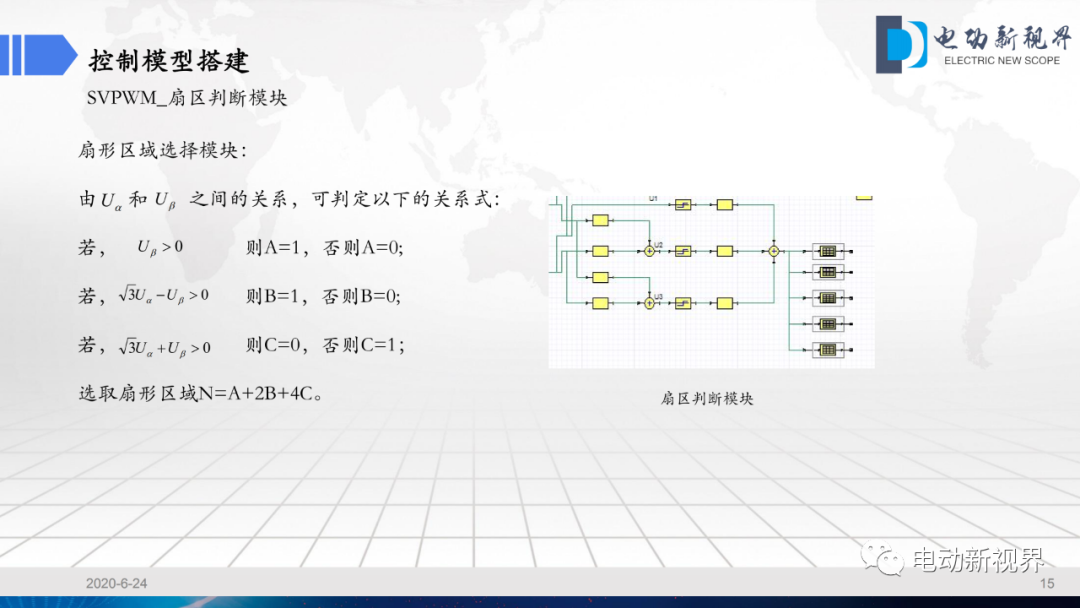
SVPWM算法
空间矢量脉宽调制是把逆变器和电机作为一个整体,利用控制的跟踪圆形旋转磁场进行PWM电压的控制,使其具有电流畸变小,转矩脉动小和电压利用率高优良特性,且易于微机实现的优点。在三相电压源型逆变器中,其中有六个功率晶体管,分别由六路PWM调制信号进行控制。逆变器的开关状态共有8种组合它们分别为 000,001,010,011,100,101,110,111,其中“1”表示上桥臂晶闸管的开通状态,“0”则表示其关闭状态,其中有六个状态是有效的,而 000,111这两个状态是无效的,没有意义。
三相电压源PWM逆变器的主电路图,空间电压矢量型控制逆变器,也被称为磁链跟踪型控制逆变器,其输出的电压是一系列脉冲波,且脉冲波是等幅不等宽。控制模型搭建
根据前面数学模型,可知三相静止绕组电流变换成两相静止绕组电流 C3s/2s , 将其转化为电流转换的等式可得:
Clark变换矩阵

simplorer下模型搭建

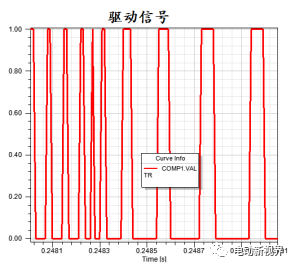
通过对电机控制电路的搭建,可以得到电机转速、电流、驱动信号的结果。给定转速为3000转,可见,通过对IGBT调节,转速跟踪能力较好。与Rmxprt联合仿真,可以快速得到仿真结果,可以看到转矩转速随时间变化关系,同时,由于脉宽调制,电压非正弦,且电气信号的跟踪频率随着PI调节逐渐趋于稳定。
转矩转速曲线▲
负载电流▲
电压信号、交直轴信号▲
利用Simplorer与Maxwell进行联合仿真,如下图所示,电源为非正弦信的脉冲信号作为电机激励。利用有限元与电路联合仿真,获得三相电流值,可见,电流非绝对正弦,存在部分谐波。电机输出转矩存在一定波动,与纯三相电流源做激励相比,脉冲电压信号作为激励的结果更加符合实际。通过信号的调制,电压输出波形如图所示,同时,电流与电压存在相位差。
总结
文中从理论出发,到模块的搭建,最后介绍联合仿真,通过整个文章的解读,可以使读者了解联合仿真的相关知识。 在这个终身学习的时代,只有逆水行舟、敢于挑战,才能跟上社会前行的脚步,学习也是如此,每个人都要开拓视野,以更加广阔的格局来拥抱时代的快速发展。
因本人能力有限,在撰写文章过程中可能存在认识上不足和疏漏,请读者加以批评指正。