CAE于飞机后货舱门多体动力学分析中的应用

1 概述
舱门是民用飞机机身中的重要且特殊的运动部件,而后货舱门是机身舱门中重要的部件,它的主要功能是提供乘客行李装载的通道及应急撤离通道。
使用软件HyperWorks模块MotionView/MotionSolve建立后货舱门的多体动力学模型,基于建模-对标-分析的完整建模流程,得到高精度的后货舱门多体动力学刚柔耦合模型。根据后货舱门开启和关闭的运动原理,建立了内手柄操纵舱门时的分析工况。从手柄力矩曲线和实测的手柄力对比,数值比较接近。另外根据后货舱门实际使用情况,通过调整部分部件的安装角度和位置后模拟仿真,从而找出舱门开启和关闭时手柄力值过大的原因。
2 后货舱门多体动力学模型的建立
后货舱门多体动力学模型采用CAD建模法,利用CAD软件Catia建立的后货舱门三维模型,附之材料属性,测量每个零件的质量、质心坐标以及质心转动惯量,直接输入到CAE软件HyperWorks中,模型外形由Catia模型直接导入。气弹簧力值由设计力值曲线数据输入。运动机构转轴用衬套连接处在多体动力学模型中处理成衬套元素,根据资料预估各方向刚度和摩擦系数。
刚体模型建立完成并通过调试仿真后,在该模型基础上,将货舱门门体和开启机构、锁定运动机构中的主要构件替换成柔性体,机构杆件与机构杆件之间通过刚性单元连接,螺栓采用刚性单元模拟。并采用模态综合法缩减模型自由度,提取有限元模型的前15阶模态进行柔性体建模,最终建立后货舱门的多体动力学刚柔耦合模型。后货舱门多体动力学模型包含有4个子系统,每个子系统由运动体、运动副、弹簧,以及作用在运动体上的摩擦力和密封带压缩力等组成。子系统之间是相互链接的,整个模型包含47个运动体,73个运动副,5个弹簧。
2.1子系统组成
A.后货舱门开启运动机构
此系统主要由气弹簧、固定底座、摇臂、可调拉杆等组成等组成。共有13个运动体,20个运动副和4个弹簧组成。如图1所示:

图1后货舱门开启运动机构
B.后货舱门锁定运动机构
此系统主要由锁滚轮、锁机构摇臂、锁座、机构连杆、平衡杆等组成。共有28个运动体和44个运动副。如图2所示:

图2 后货舱门锁定运动机构
C.后货舱门内手柄机构
此系统主要由内手柄、限位气弹簧、连杆等组成。共有5个运动体、7个运动副、1个弹簧组成。如图3所示:
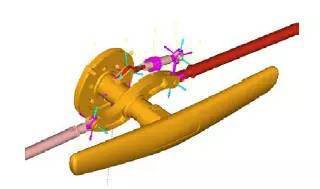
图3内手柄机构
D.后货舱门外手柄机构
此系统主要由外手柄、滚轮组件等组成。共有1个运动体、2个运动副组成。如图4所示:

图4 外手柄机构
E.后货舱门内外手柄联动机构
内外手柄联动机构是通过一套钢索机构来实现内外手柄的联动,主要由钢索、可调接头、挡球、钢索滑轮等组成。如图5所示。

图5内外手柄联动机构
F.后货舱门机构摩擦力
此系统主要给后货舱门运动机构转轴衬套施加摩擦力。
力值函数表达式:

2.2子系统之间的链接关系
后货舱门多体动力学模型4个子系统之间的链接关系见表1,整个系统的多体动力学刚柔耦合模型见图6。

表1子系统之间的链接关系

图6 刚柔耦合多体动力学模型
3 后货舱门多体动力学分析
根据后货舱门开启和关闭的运动原理,建立了内手柄操纵舱门时的分析工况。包括模拟用内手柄操纵后货舱门解锁、开启、关闭和锁定时的分析工况。输出了后货舱门运动过程中部分运动体的力或力矩曲线,如内手柄力矩曲线,舱门开关推力曲线等。从手柄力矩曲线和舱门开关推力曲线与实测值对比,数值比较接近。
3.1模拟内手柄操纵后货舱门解锁和锁定的分析工况
模拟内手柄操纵后货舱门解锁运动(0-5秒),舱门解锁后保持静止(5-10秒),最后扳动内手柄,后货舱门锁定到位(10-15秒)。
在整个模拟运动过程中,不仅能够观察到每个运动体的运动轨迹,如锁滚轮在锁座内的运动轨迹,还能够得到每个运动体或运动副在每个时间段的力或力矩值,如内手柄的解锁(实测力矩最大值38.7Nm)和锁定(实测力矩最大值40Nm)力矩曲线等。内手柄的解锁力矩曲线如图7所示,锁定力矩曲线如图8所示。

图7 内手柄解锁力矩曲线

图8 内手柄锁定力矩曲线
3.2模拟内手柄操纵后货舱门打开和关闭的分析工况
模拟内手柄操纵后货舱门解锁运动(0-5秒),后货舱门在气弹簧和人为推力的作用下旋转打开(5-7.5秒),然后后货舱门在人为拉力和气弹簧的作用下旋转关闭(7.5-10秒)。
在该工况下,由于内手柄操纵后货舱门解锁运动(0-5秒)与前述工况完全一致,因此,仅考虑舱门打开和关闭时的推/拉力值。后货舱门开启和关闭时的推/拉力曲线如图9所示(实测最大推力值217N)。

图9 后货舱门开启和关闭时的推/拉力曲线
3.3柔性体应力和变形分析
部分柔性体零部件在运动过程中的最大应力和应变如图10所示。在整个运动过程中,机构零部件的应力和变形都较小。

(a)门体

(b)内手柄
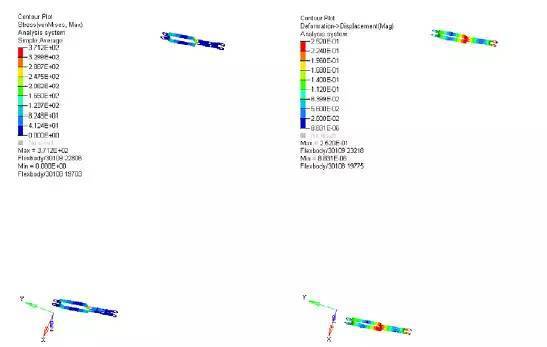
(c) 叉形连杆

(d) 摇臂
图10 柔性体零部件应力和变形云图
4 后货舱门故障模拟
后货舱门在实际使用时,经常发生手柄力值过大甚至手柄很难转动等情况,排除设计因素,对装配时较难保证的内手柄支耳交点位置和锁座安装角度进行模拟仿真,评估装配精度对手柄力值的影响。
4.1模拟后货舱门内手柄支耳交点位置装配误差过大
由于后货舱门解锁/锁定是由一系列机构杆件传力运动,因此,机构杆件的交点位置对手柄力值有较大影响,若在安装过程中交点误差较大,会对手柄力值产生较大影响。对内手柄支耳与可调杆上的交点进行微调移动,如图11所示。由于内手柄转臂轴不变,因此当交点Q1向下移动3mm时,交点Q2也相应的向上移动一段距离。此时,内手柄开启力矩最大值为60.9Nm,增加了22.6Nm,交点位置的变化对内手柄开启力矩值影响结果如图12所示。
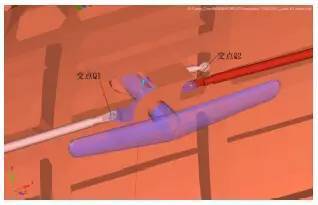
图11 移动的交点

图12 交点位置变化对内手柄开启力矩值影响
4.2模拟后货舱门锁座安装角度变化
后货舱门解锁过程中,锁滚轮沿锁座外形滚动,当其中任何一个锁座安装角度偏差过大时,将会对手柄力值产生较大影响。将8个锁座中的1个锁座沿逆时针方向旋转2°(如图13所示)后,锁座安装角度的变化对手柄开启力矩值的影响如图14所示。从图中可以看出,锁座安装角度一旦偏差过大,锁滚轮滚过锁座最高点时的手柄力值将会大幅增加。
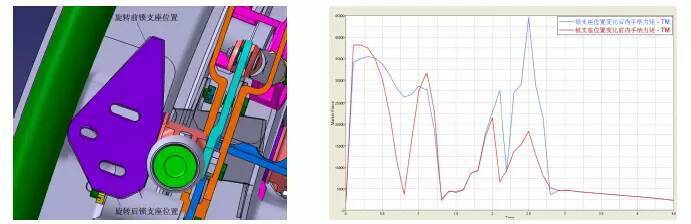
图13 锁座安装角度变化 图14锁座安装角度变化对手柄开启力矩值影响
5 小结
综上所述,MotionView具有强大的机械仿真功能,能够输出精准的力值曲线,能够实现刚性体和柔性体的混合仿真,能够为设计人员提供清晰的受力信息。
本文转自【有限元科技】


