CAE在空间相机结构设计中的应用

1 引言
相机主体由镜头与焦面盒组成,其中镜头内有光学等敏感元件,而焦面盒组件集光、机、电、热于一体,为相机关键组件之一。在设计初期阶段,为了验证所设计结构的合理性,需对其进行静力学分析以及固有振动分析。
本文在SolidWorks提供三维模型基础上,利用HyperMesh对装配体建立有限元模型,对其进行了静力分析和模态分析。验证了结构设计的合理性,并为后续空间力学环境试验提供参考。
2 空间相机结构
某空间相机结构如图1所示,包括镜头、焦面盒以及电路板组件。整体外包络尺寸为191X110X143(mm)。

图 1 某空间相机结构图
3 有限元模型建立
3.1 几何清理
此相机结构模型采用SolidWorks建立,采用HyperWorks对其进行有限元分析之前,需将原装配体格式转换为IGES格式,再导入至HyperMesh。原模型含有很多细节特征,如倒圆、小孔,以及电路板上的很多小插件。如果要准确模拟这些特征,需要用到很多小单元,导致求解时间延长。而对于设计初始阶段,有限元分析只需要简化的几何模型,因此需要对这些细节信息进行简化,以便于网格划分和分析。此外,模型的一些几何信息在导入时可能会出错,如导入曲面数据时可能会存在缝隙、重叠、边界错位等缺陷,导致单元质量不高,求解精度差。清理后的模型如图2所示。
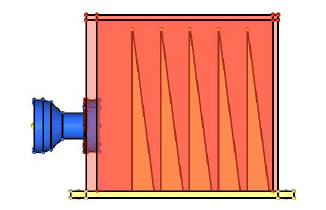
图 2 几何清理后的模型
3.2 网格划分
由于该结构模型比较规则,尺寸不大,相机各部件均采用正六面体为主的实体单元建模。为了简化,镜头与焦面盒之间的联接采用重节点方式。镜头内部结构的变形不是我们关注重点,采用PMASS质点单元代替内部结构,并用RIGID单元使质点单元与镜头成为一个整体。有限元模型如图3,信息如表1。
表 1 相机有限元模型节点信息

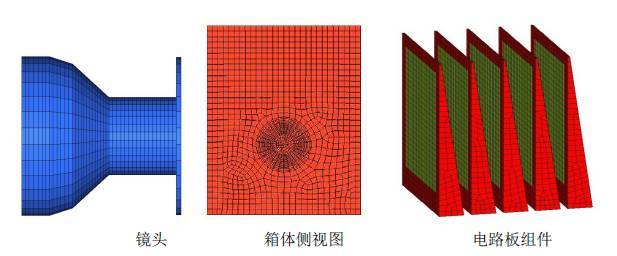
图 3 相机各零部件有限元模型
3.3 材料和属性
相机结构中各零部件所用材料及属性如表2
表 2 材料及属性列表

4 静力分析
强度是结构件正常工作必须满足的基本条件。本例中,由于镜头为悬臂结构,在重力载荷作用下,会发生微小变形。为了验证所设计结构的合理性,对整体结构进行了静力分析。
4.1 边界和载荷条件
根据实际情况,完全约束箱体底板四个联接孔的六个方向自由度,并沿着模型Y轴负向加载1g的惯性载荷。
4.2 计算结果
所得位移云图如图4所示,由静力分析结果可以看出,结构的最大变形为4.41X10-7m,主要集中在远离镜头的一块电路板框架上。
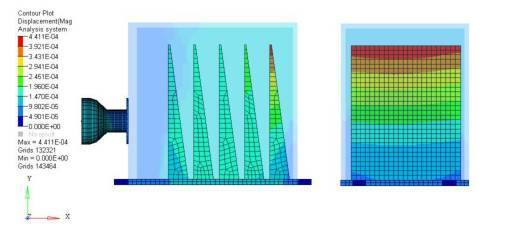
图 4 相机组件位移变形云图
5 模态分析
模态分析是最基本最重要的结构动态分析,为相机研制过程中的重要组成部分。为了了解结构动态特性,必须认识结构的基本模态。模态分析结果表示了结构固有动力学特性,并为后续动力分析(如瞬态响应分析、频率响应分析、响应谱分析等)提供了依据。模态分析所得到的固有频率和振型可验证结构设计的合理性,有效地改进设计,并为相机后续的力学环境试验提供理论数据基础。
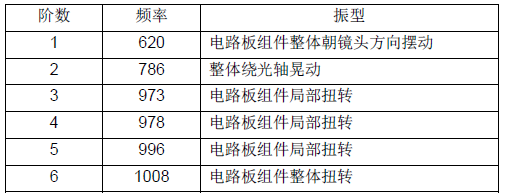
对相机整体进行模态分析结果如表3、图5所示。
表 3 相机整体模态


图 5 相机整体前六阶模态
6 结构优化设计
由表3可以看出,相机的整体基频比较小。同时,经过初始方案设计,发现电路板厚度较薄,整体刚度不足,造成电路板响应过大。根据有限元分析结果,对电路板组件进行优化设计。在电路板支架之间增加了20X4X20(mm)的加强筋,并对其进行有限元分析,修改之后的有限元模型结果如图6所示。

图 6 优化后电路板组件
优化后的有限元模型静力变形最大值为2.54X10-7m。
优化后的整体模态如表4
表 4优化设计后相机整体模态
7 结论
本文利用了HyperMesh强大的前处理功能,建立某空间相机组件结构有限元模型,并利用OptiStruct对模型进行静力学分析以及模态分析,极大的缩短了概念设计阶段产品研制的周期。
根据分析结果,对原有电路板组件结构进行优化设计。优化之后,最大静力变形从4.41X10-7m到2.54X10-7m,减小了42.4%。基频从553HZ到620HZ,提高了12.1%,并使电路板组件的摆动问题得到了有效解决,满足了总体要求。本文仿真分析结果可为空间相机的研发、力学试验提供参考。
本文转自【有限元科技】


