TI_AWR2944角雷达基本参数解析

AWR294x 是TI一款单芯片毫米波传感器,由能够在 76GHz 至 81GHz 频段共5G带宽内工作的 FMCW 收发器、雷达数据处理元件和车载网络外围器件构成。采用45nm RFCOMS集成工艺可实现具有集成 PLL、VCO、混频器和基带 ADC 的单片实施 3-4TX,4 RX系统。DSP 子系统 (DSS) 中集成了 TI 的高性能 C66x DSP,可用于处理雷达信号。该器件包含一个无线电处理器子系统 (RSS),该子系统负责雷达前端配置、控制和校准。在主要子系统 (MSS) 中,该器件实现了一个用户可编程的 ARM R5F,允许自定义控制和汽车接口应用。硬件加速器模块 (HWA 2.0) 通过卸载通用雷达处理(例如 FFT、恒定误报率 (CFAR)、缩放和压缩)来对 DSS 和 MSS 进行补充。这会节省 DSS 和 MSS 上的 MIPS,为自定义应用和更高级别的算法腾出了资源。
器件中还提供了硬件安全模块 (HSM)(仅适用于安全器件型号)。HSM 由可编程 ARM Cortex M4 内核和必要的基础设施组成,以在器件内提供安全的操作区域。简单编程模型更改可支持各种传感器实施(近距离、中距离和远距离),并且能够进行动态重新配置,从而实现多模式传感器。

图一:AWR2944开发板
参考设计使用多普勒频分复用(Doppler division multiple access DDMA),且大多数的处理过程均在硬件加速器(HardWare Accelerator)HWA里完成。一些中间处理任务移到DSP中。
参考最新Euro NCAPNo.79法规,雷达需要探测到前车车位的最小距离为Srear(与前后车辆的行车速度相关)。为了满足法规要求,雷达需要满足行驶速度130kmph时最远200m的探测距离;为满足以上性能,AWR2944使用第4根发射天线来实现9.5°的方位面角度分辨率;此外利用TX移相器和改变每个Chirp的移相角度的能力为每个传输信道提供唯一的循环相移,能实现多普勒域里的通道分离,DDMA比标准TDM提升10log(Nt)=6dB的信噪比,Nt为发射通道数;根据雷达方程,信噪比的提升能增加雷达的探测距离;
下面对系统的关键参数做分析:

表1:关键性能指标

表2:Chirp配置表
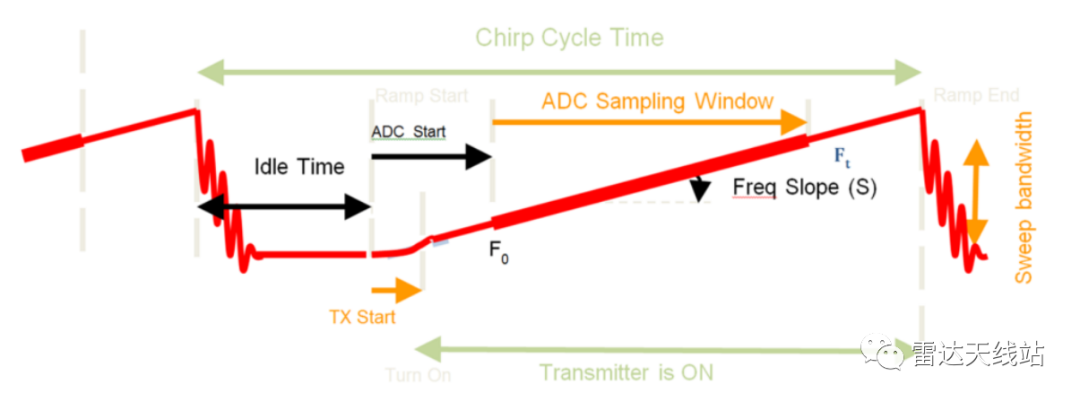
图3:典型Chirp波形
Chirp波形中,根据表2-1提供的配置表,对性能计算比较关键的参数有斜率8.83MHz/us,每帧包含的Chirp数768构成图4的帧结构,除此之外,每个Chirp的有效时间为23.83us,影响雷达的测速精度;
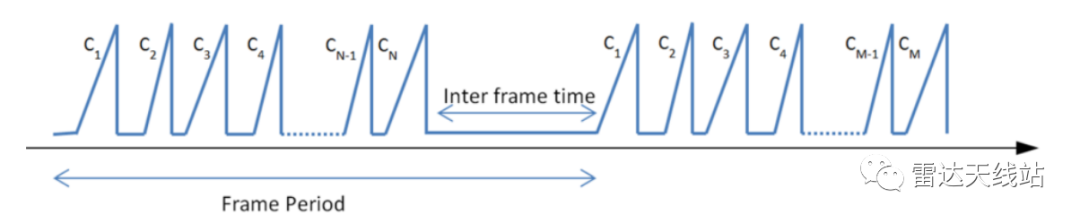
图4:典型帧结构

表3:AWR2944的射频性能指标
RF指标中,接收关键参数包括Noise Figure=13dB,IF bandwidth=15MHz,发射参数如芯片发射功率Txpower=12dBm;

图4:天线布阵

图5:MIMO
天线的布局:4T4R天线布局包含方位和俯仰感知,Tx2和TX1,3,4俯仰面间距0.8倍波长,TX间距均为半波长,因此不存在角度模糊的问题;

表4:系统参数
对上表的系统参数进行解析:
f=79GHz,c=3x10^8m/s,λ=c/f
雷达最大探测距离:

2.距离分辨率(以4GHz带宽计算理论值):

3.最大测速:

4.速度分辨率

5.角度分辨率

上述计算过程,如有错误,请指正;


