几个与摄影测量(photogrammetry)相关的软件

摄影测量法是一种通过使用摄像头从不同角度和位置拍摄照片,然后从这些照片中提取三维信息的技术。摄影测量法可以用于创建地图、建筑物模型以及在电影、游戏和虚拟现实中创建现实世界的三维模型。摄影测量法依赖于复杂的算法,如特征提取和匹配、三维重建等,来处理照片并生成三维数据。
点云是一种用于表示三维空间中点的数据结构。一个点云包含许多空间上的点,每个点都有一个或多个属性,如位置、颜色和法线等。点云可以从各种来源获取,如激光扫描仪、立体摄像头或摄影测量法等。点云数据可以用于创建三维模型、测量距离、计算体积等。
简而言之,摄影测量法是一种从照片中生成三维数据的技术,而点云是一种表示三维数据的数据结构。摄影测量法可以用于生成点云数据,但它们本身是两个不同的概念。
下面是进行photogrammetry分析的一般步骤:
(1) 采集图像:使用相机采集尽可能多的图像,从不同的角度和位置拍摄被测物体。为了获得更好的结果,建议使用高分辨率的相机和三脚架。
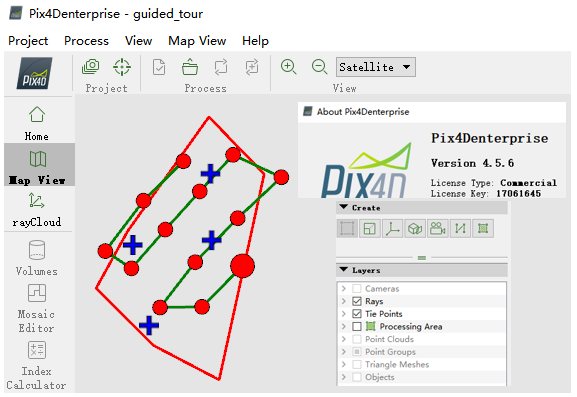
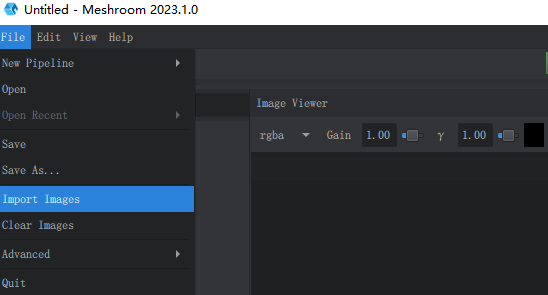
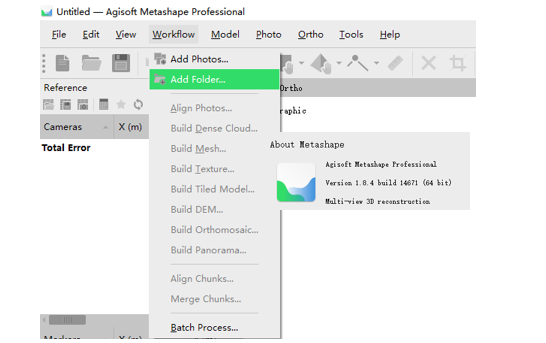
(2) 图像预处理:将采集的图像导入photogrammetry软件(例如Agisoft Metashape或Pix4Dmapper),进行图像预处理。这包括图像对齐、去除图像失真、校准相机参数等操作,以确保所有图像都处于相同的坐标系统中。
(3) 特征提取:使用photogrammetry软件自动提取图像中的特征点,并将它们匹配起来。这些特征点是用于计算三维点云和表面模型的基础。
(4) 三维重建:利用匹配的特征点,photogrammetry软件可以计算出三维点云。该点云表示物体表面上的一系列三维点。可以使用点云编辑工具删除不需要的点,平滑表面等等。然后,基于点云,可以生成网格模型和纹理映射。
(5) 分析和输出:使用photogrammetry软件进行量化分析,例如体积测量,高度测量,倾斜等。可以根据需要输出模型以进行进一步分析。