PiFlow新功能 - 参考坐标系法计算动导数

参考坐标系法
背景介绍
动导数介绍
动导数是飞行器动力系数和气动力矩系数对飞行器无因次旋转角和姿态角变化率的导数,是飞行器研制控制系统设计和动态品质分析不可缺少的原始启动参数,它关系到飞行器的飞行品质、自动驾驶控制系统控制率设计以及安全飞行的一个重要方面。
参考坐标系法介绍
旋转参考坐标系法通常用于模拟区域的刚体旋转和平移,而不移动网格节点,该功能类似于ANSYS Fluent中的MRF(Moving reference Frame)。此建模方法在旋转参考坐标系中将瞬态问题转化为稳态问题,从而提供时间平均求解。
★
后掠翼
案例介绍
1.几何外形
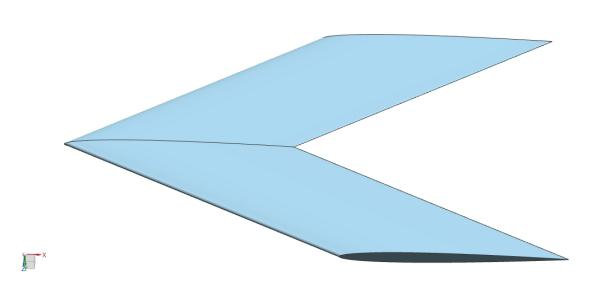
图1 三维模型几何外形
模型信息 | 后掠角:60deg |
翼展:1.34m | |
弦长:1m | |
转矩中心:1.000187899m,0,0 (质心) | |
参考面积:1.34㎡ |
2.网格自动生成
PiFlow基于笛卡尔网格的全自动流场仿真软件,自动生成网格时间为32秒,生成网格量为50.8万(普通笔记本)。
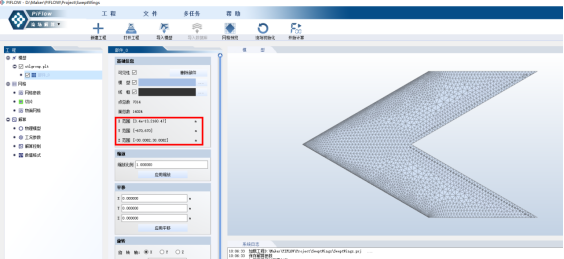
图2 模型导入
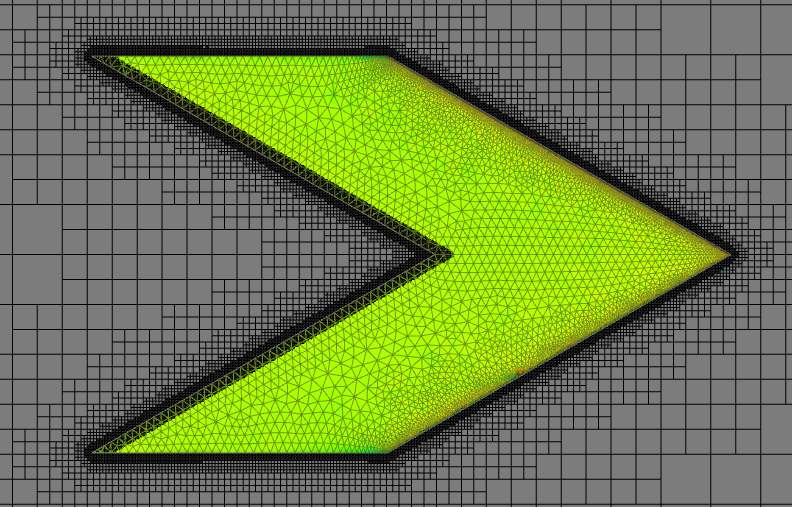
图3 PiFlow网格效果展示
3.计算状态及求解设置
俯仰力矩系数动导数可以对应飞机的拉升运动,如图3,该运动看起来像是非定常运动,但是如果选择一个坐标系固连在飞行器上,则该坐标系随着飞行器的运动而运动,相对于这个坐标系来讲,流动就是定常的,因此可以使用这种定常的方法来模拟非定常拉升运动过程。

图4 定常拉伸运动示意图
基于旋转参考坐标系法,选择不同的俯仰角速度ω1、ω2和旋转半径R1、R2,分别求解定常的俯仰力矩系数,按照下式即可得到俯仰力矩系数动导数的值Cmq,公式如下:
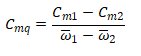
其余气动力系数动导数可使用类似方法进行计算。
表一 工况参数表

计算旋转坐标系参数设置:
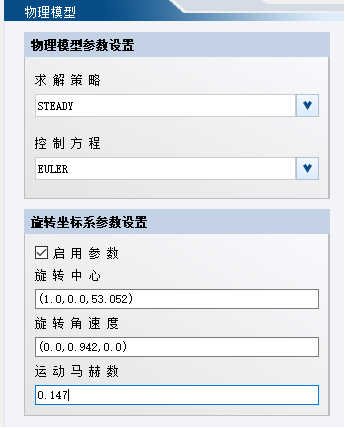
图5 PiFlow计算设置
4.计算结果
表二 实验气动力结果

表三 PiFlow、Star CCM+ 模拟值
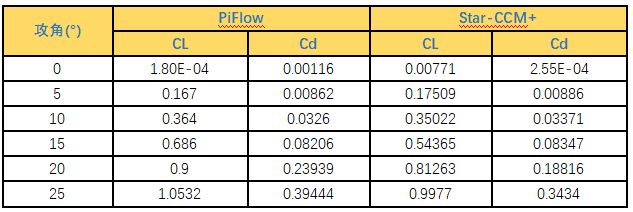
数据对比

图6 升力系数
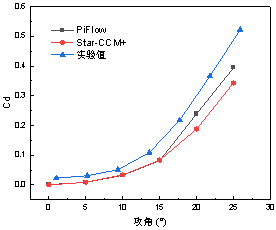
图7 阻力系数
表四 俯仰力矩系数动导数对比
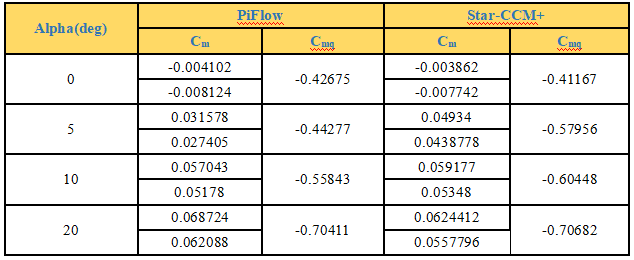

图8 俯仰力矩系数动导数
参考文献
[1]基于CFD的动导数计算及非线性气动力建模技术.2018.米百刚
[2]Approximate relations and charts for low-speed stability derivatives of swept wings. Thomas A.Toll.


