非线性 | 弧长法(Arc-Length Methods)


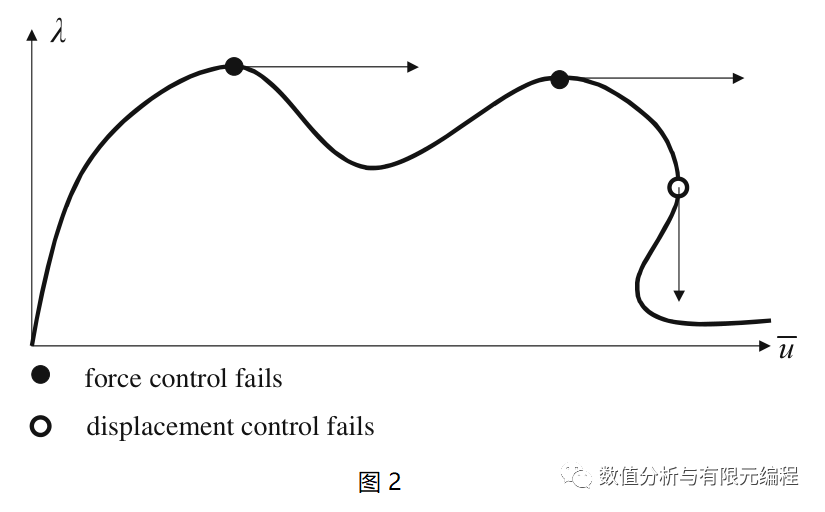
图1所示为弧长法求解过程,若以下标 表示第 个荷载步,上标 表示第 个荷载步下的第 次迭代,显然,当荷载增量 ,则迭代路径为一条水平直线,即为著名的牛顿-拉夫逊方法。对于图2所示的求解问题,牛顿-拉夫逊方法不能跨过极值点得到完整的荷载-位移曲线。因此,弧长法最重要的就是求荷载增量。
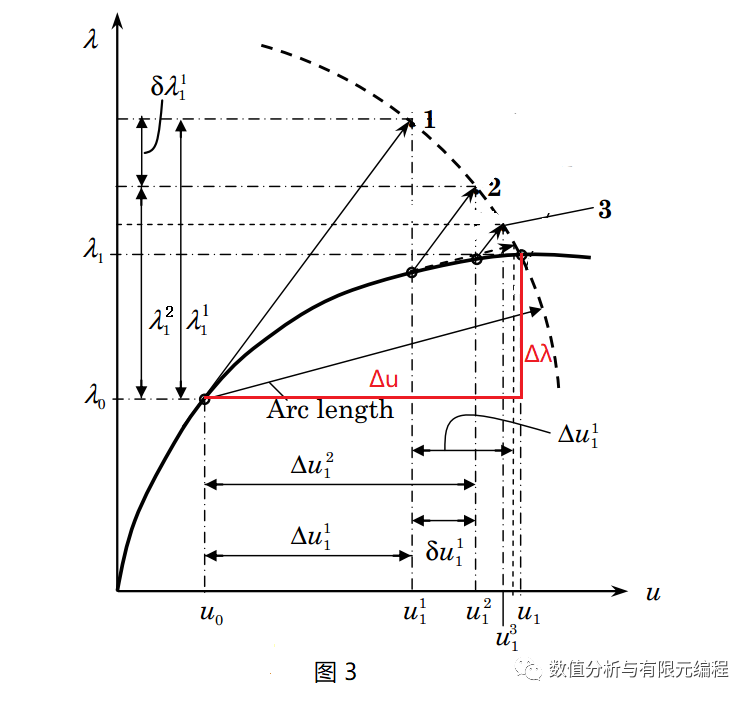
而弧长法的荷载增量 是变化的,可自动控制荷载,这样在原方程组的基础之上又增加了一个未知数,因此需要额外补充一个方程。如图3所示,某一荷载步迭代至收敛时总有
考虑系统方程组
在迭代过程中, 逐渐趋于0,如果这两个值都为0,则说明该荷载步的迭代已收敛。在上一个迭代收敛点(如图1中的 )将 作一阶泰勒展开
即
令 , 则
弧长法通过自动建立适当的荷载增量进一步优化了牛顿-拉夫逊方法,使用弧长法,可以跟踪复杂的荷载-变形路径。
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-06-02
最近编辑:1年前

硕士
有限元爱好者

相关推荐
