电流采样及坐标变换--第一部分

文章转自电控艺林
前言
永磁同步电机(PMSM)应用范围广泛,经常用于新能源汽车、机床、工业等领域。在实际使用中,我们经常采用矢量控制算法(FOC)完成PMSM的高性能控制。
矢量控制中通常采用双闭环结构,其中外环为速度环,内环为电流环。为了实现PMSM高性能控制,我们会采用各种复杂的算法来实现目标,这其中电流环相关算法又是重中之重。但是需要指出,电流环性能好坏除了与采用的算法有关之外,还与最基本的电流采样问题以及坐标变换问题紧密相关。只有当这些细节问题研究到位之后,高性能的控制算法才会更好发挥作用。
这里主要探讨电流环的电流采样问题、故障保护以及坐标变换问题。
1 单相电流采样模型及补偿
图1为实际系统中电流采样系统示意图,主要电源(含参考源)、HALL电流传感器、放大及滤波电路、AD转换器。对于实际采样系统而言,各个器件均不是理想的,综合起来会产生明显的赋值衰减和相位滞后,这势必会降低控制性能。

HALL电流传感器:
(1) 增益非线性:即使采样的电流为直流时,也会在电流较大时产生增益下降,即增益非线性(饱和效应)。进行建模时,认为增益非线性只是改变了输出HALL输出电压幅值,并不产生相位滞后。记为 。
。
(2) 低通特性:此特性会随着电流频率的变化而产生不同程度的相位滞后和幅值衰减。记为 。
。
为了后续分析方便,这里假设 。实际可通过测试或者查询HALL传感器的数据手册得到。图2为增益非线性的示意图。由此图可见在-400A~400A是线性区域,增益为1pu;而电流处于-700A~-400A以及400A~700A范围内时增益下降到了0.98pu;当电流处于-900A~-700A以及700A~900A范围内时增益下降到了0.952pu。
。实际可通过测试或者查询HALL传感器的数据手册得到。图2为增益非线性的示意图。由此图可见在-400A~400A是线性区域,增益为1pu;而电流处于-700A~-400A以及400A~700A范围内时增益下降到了0.98pu;当电流处于-900A~-700A以及700A~900A范围内时增益下降到了0.952pu。

由上述可知,HALL传感器的传递函数为 。
。
放大及滤波电路:
低通特性:此特性会随着输入信号频率的变化而产生不同程度的相位滞后和幅值衰减,记为 。为了后续分析方便,这里假设
。为了后续分析方便,这里假设 ;实际系统的可由硬件放大和滤波电路RC参数计算得到。
;实际系统的可由硬件放大和滤波电路RC参数计算得到。
由上述可知,真实电流到AD采样端口的传递函数为如下式所示。传递函数中会出现增益变化,甚至出现了相位滞后。对于电流闭环控制而言,控制性能好的前提是电流采样必须准确,如果采样出了其他时刻的电流值或者采集的值不准确,那么控制性能必然下降。 
这里通过计算可得 。而理想的传递函数为
。而理想的传递函数为 ,这就需要在系统中构建补偿传递函数
,这就需要在系统中构建补偿传递函数 。其中
。其中 可根据图2进行查表补偿,这里主要分析
可根据图2进行查表补偿,这里主要分析 。
。
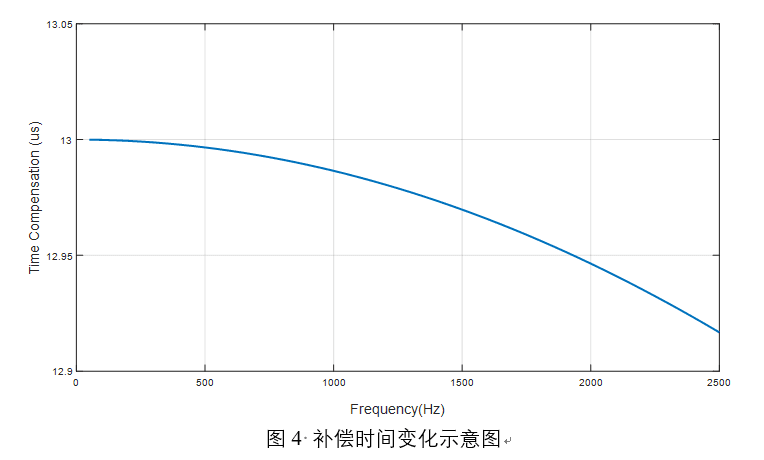
下图3为在电流频率为0Hz到2500Hz的幅值和相位示意图。
对于幅值补偿,可以根据图3计算结果构建查找表,查找表的输入为电流频率。那么对于相位该如何补偿呢?这里先把相位补偿量转换为时间,方法是某个频率的实际补偿相位除以对应的角速度,结果如图4所示。可见时间补偿值变化相对缓慢,因此这里计算出平均时间补偿值为Td=12.97us。它的使用将AD转换中采样点设置中介绍。
AD转换:
(1) AD采样速率和电流环PWM更新策略有关系。如果用单采样单更新方式,则AD采样速率和PWM频率一致;如果用的是双采样双更新,则AD采样速率为PWM频率两倍。
(2) AD采样点的设置要结合电流纹波特点以及时间补偿值为选取。
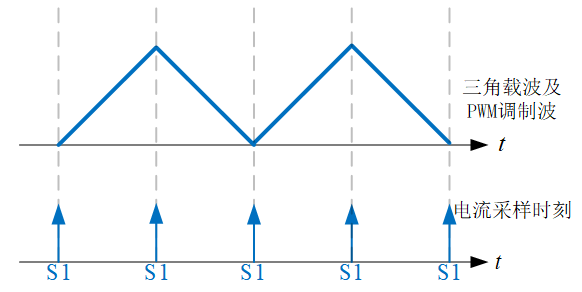
在不考虑采样系统时间滞后(相位滞后量除以角速度)时,在PWM载波的起始点和中间点时,采样出的电流纹波最小,最接近真实电流。图5为双采样双更新时理想采样点的示意图。
而在实际电流采样系统中,时间滞后不可避免,详见图6。图中蓝色为真实电流,红色为受到采样系统时间滞后的电流。S1采样点为PWM上下溢时刻,此时本来想采样蓝色的真实电流Ia0,但受到了时间滞后的影响却采集到了红色滞后电流的Ia1。

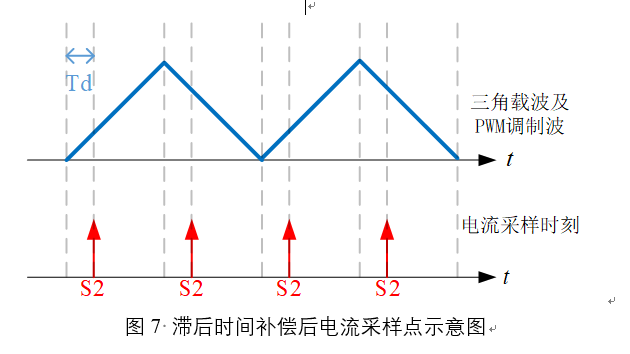
为了补偿时间滞后的影响,则需要把采样点S1平移Td=12.97us到S2点,这样就可以采集到电流值Ia0了。修正后的双采样双更新电流采样点在图7中以红色箭头标出。
在从AD中获取电流采样结果之后,则可以按照下面图8框图进行处理。

2 三相电流采样及故障诊断
2.1三相电流采样
单相电流采样处理好还远远不够,而是需要将三相电流放在一起考虑:
(1) 任意一相电流采样零漂没有补偿:转矩会产生和定子电流频率同频率的波动量。
(2) 任意两相电流增益不平衡(通过同样大小和频率的电流时,到达AD端口时的电压幅值却不一样):转矩会产生定子电流频率两倍频率的波动量。这主要由元器件的分散性导致,可以控制器出厂的时候进行校准。
(3) 任意两相电流相位延迟不一致(通过同样大小和频率的电流时,到达AD端口时的电压相位却不一样):主要是采样一致性较好的元器件来解决。若是通过软件补偿,则比较麻烦。
2.2电流采样故障诊断
为了提高系统的可靠性与安全性,电机三相电流采样需要设置如下故障诊断。
电流采样故障诊断:
(1) 零漂故障:零漂数值超过限制。这主要由传感器和信号处理电路老化或者热稳定性变差导致,甚至有可能出现了劣质元件。
(2) 采样值超上限和采样值超下限:AD采样回来的数值超过软件中设置的上下限。此上下限是采样电路处于正常状态下不应出现的,如果出现经常对应HALL传感器或者信号处理电路出现电源或者信号丢失。
(3) 电流三相之和超限:去除零漂后的三相电流之和的绝对值超过限制。这一机制是对三相电流采样系统是否正常的综合判断。
(4) 过流故障以及开路故障等:出现此类故障则代表电机系统失控以及机械结构出现破损等。
参考文献:
[1] 'Chapter: 7.2 measurement of phase current' of 'Control of Electric Machine Drive' ,Seung-Ki Sul
未完待续。。。。
说明:本文来源电控艺林;文中观点仅供分享交流,不代表本公 众 号立场,转载请注明出处,如涉及版权等问题,请您告知,我们将及时处理。


