SIMULIA 2023 新功能直通车|Abaqus R2023x Explicit 新功能介绍

● 充分利用共享内存,在每个域上的计算都作为一个独立的任务被分离出来,采用第一个节点的核心作为线程参与来完成这些任务。通过多线程进行并行计算可能会增加内存得消耗。
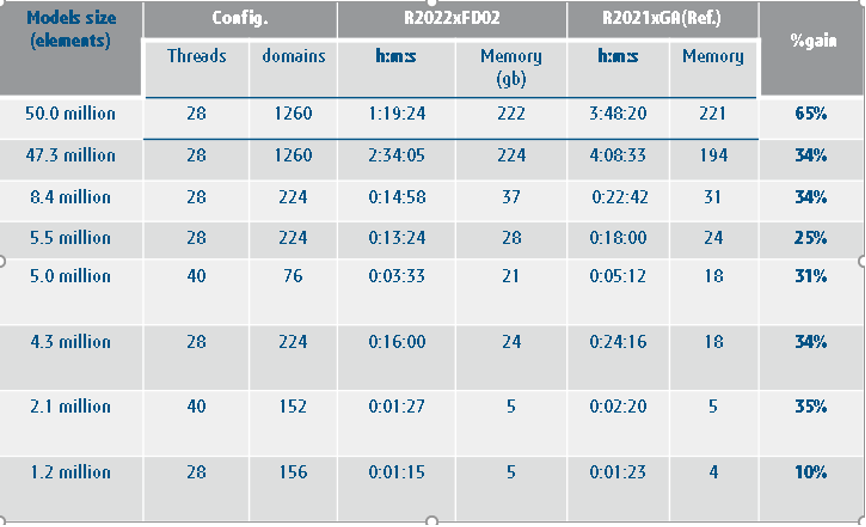
● 并行计算增强,提高计算效率,显著缩短计算时间。
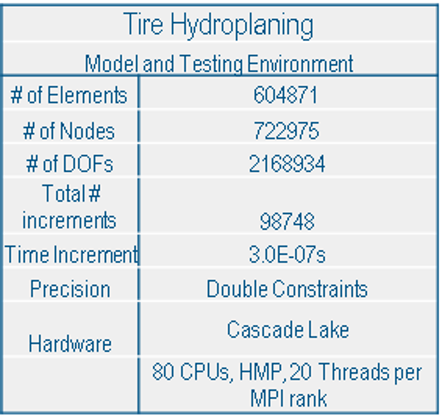
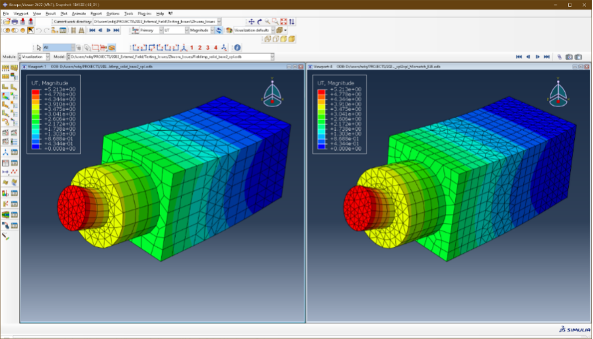
采用新的轮胎滑水模型来验证explicit的性能。速度70km/h,10mm水深。

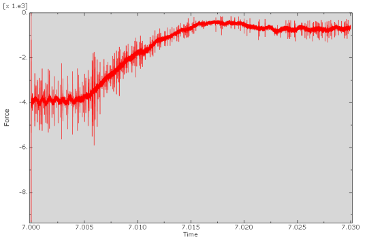
模型及测试环境如下图:
进程的CEL接触成本由其所有线程(HMP)共享,改善负载平衡。计算速度提升了44%。

● 新加入*STEP CONTROL关键字,可以控制由一系列前期未知触发标准的事件(步骤)例如,当达到指定的电压时,我如何停止电池充电模拟,如果设计被证明是不行,我如何结束这个模拟。格式如下:
*STEP CONTROL, NAME=name, ACTION=END STEP/ END ANALYSIS
Sensor name, MAX/MIN/ABSMAX/ABSMIN, cutoff
● 当传感器的值达到标准时,就会采取动作,结束分析步是默认为动作参数,一个* STEP CONTROL可以定义多个控制标准。一个分析步中也可以定义多个*STEP CONTROL关键字。
以下*Step Control定义与其他历史记录选项结合使用,可以在电池模拟中停止放电步骤和充电步骤。
● STEP CONTROL 案例:控制电池模拟是否充放电,当放电期间电势(EPOT)达到3.6时,第一步在3150秒(总3600秒)停止,第二步是充电步骤,当电势(EPOT)达到4.0时,在1800秒(3总600秒)停止:
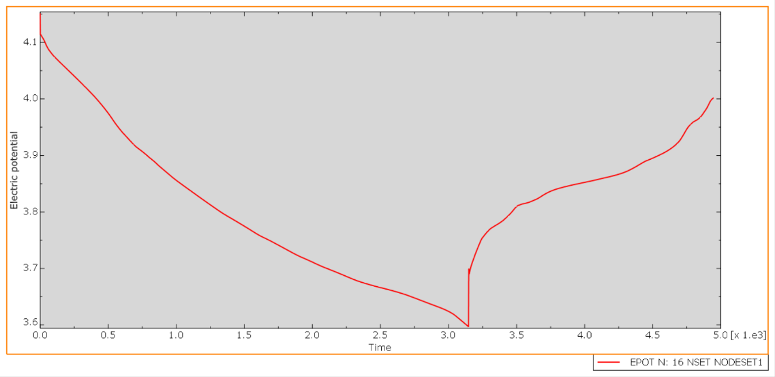
● 消息文件中打印一个注释,指示这些步骤已结束:
***NOTE: THE STEP HAS ENDED DUE TO THE TERMINATION CONDITION ON *STEP CONTROL
FOR SENSOR Monitor.1
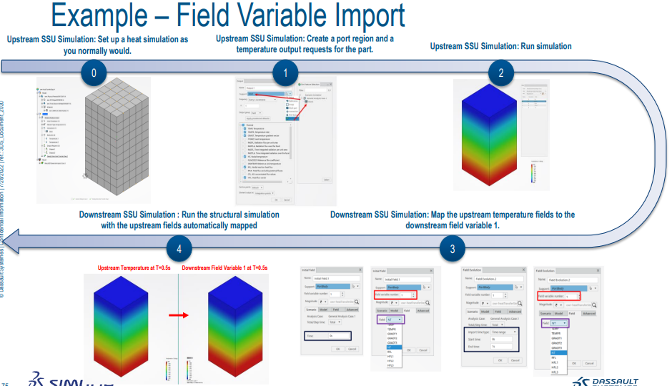
● Abaqus/Exclicit现在可以使用*FIELD IMPORT导入随时间变化的场变量在以前的版本中,是以场分布或者初始条件导入。采用了新的顺序耦合算法,当后面分析步求解器使用比上道分析步保存的数据明显更小的时间增量时,它减少了数据传输和场映射的数量,以获得更好的性能。而且现在还可以导入以下与历史记录相关的场变量:
Mechanical Fields: displacements (UT), velocity (VT), acceleration (AT), rotation (UR), rotational velocity (VR), rotational acceleration (AR), force (CF), and moments (CM)
Thermal Fields: nodal temperature (NT) and concentrated heat flux (CFL)
General Field: field variables (FV)
● 使用案例:从质量扩散分析中导入归一化浓度(NNC),并将其作为场变量1(FV1)导入:
*Field Import
*External Field, File=upstream.sim, TStart=0, TEnd=0.01
Elements, TargetElsetName, FV1, Elements,SourceElsetName, NNC
● 3DX系统支持以下按顺序排列的顺序耦合:
1. 连续热应力:可以将温度从热分析导入到热应力分析中,可以将共轭传热过程中的温度导入到热应力分析中。
2. 可以在连续的流体结构耦合间导入结构体。
3. 可以将塑料应用程序中的厚度导入到结构中。
4. 将字段变量导入到结构分析中。
● 新增和CST-STUDIO做顺序耦合分析功能,在电磁时域分析时,可以从CST Studio导入在离散点上的洛伦兹力和转矩结果。在时域和频域电磁分析时候,可以导入-低频电磁模拟产生的体积热损失及高频模拟中的表面热损失。
● 支持场映射控制和场操作。
从稳定性的角度考虑强耦合物理,增强的隐式迭代耦合算法(称为加速器)扩大了强耦合物理的收敛半径,提高了收敛速度。解决我们以前无法解决的强耦合物理问题;以降低解决方案成本解决问题;更少的耦合交换(减少50%);
收敛标准现在由协同仿真服务来控制,可以支持各种收敛标准,收敛标准可以指定。
没有用户界面,我们正在进行平台上协同模拟的应用内创作。目前,需要手动编辑CSS配置文件:
◆ see SWYM post FSI Batch Run Script + User Guide from Matthew Knight

● 以下方法和加速器可用于隐式迭代耦合:
1. Extrapolation/外推法
a) 使用先前的增量解决方案来提供对当前增量的初始猜测。
b) 支持零阶、一阶和二阶外推法。
c) 外推法通常与下面描述的所有方法一起使用。
2. 恒定松弛
a) 使用具有恒定用户指定的松弛因子的松弛技术。
b) 通常,一个较小的松弛因子会增大收敛半径,但也会降低收敛速度。
c) 常数松弛通常用于以下方法的初始交换;为了保证完整性,最好使用Aitkens 或者Quasi-Newton方法代替。
3. Aitkens’ 松弛
a) 使用一种松弛因子基于先前的残差连续调整的松弛技术。
b) 以前由FMK-to-标准和Abaqus-to-StarCCM使用,现在通常可以作为协同仿真服务的一部分使用。
4. 高斯-牛顿方法
a) 这些方法近似于界面上的一个逆雅可比矩阵。
b) 增大收敛半径,提高收敛速度;因此,我们可以在减少耦合交换次数的情况下解决高强耦合物理问题。
c) 支持各种过滤技术来决定从之前的交换中获取哪些信息来构造逆雅可比矩阵。
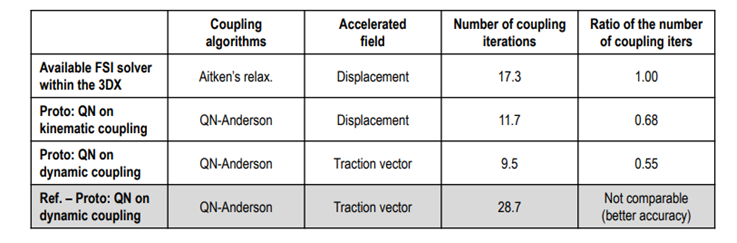
案例1:TUREK S. and HRON J., Proposal for numerical benchmarking of fluid-structure interaction between an elastic object and laminar incompressible flow, Lecture Notes in Computational Science and Engineering, 2006.
Average Number of Coupling Iterations for Turek & Hron FSI 3 (early development data provide by Eric Veron):
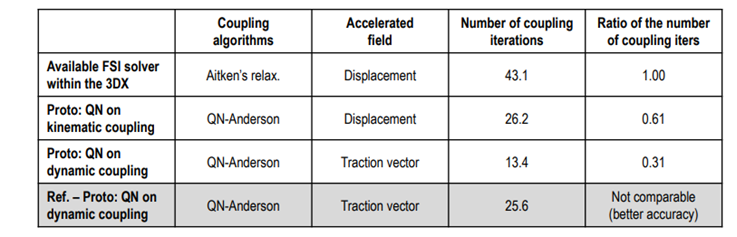
案例2:FERNANDEZ M., MOUBACHIR M., A Newton method using exact Jacobians for solving fluid–structure coupling, Computers and Structures, 2005.
Average Number of Coupling Iterations for Artery Pulse (early development data provide by Eric Veron):
场映射控制允许从密集场映射到粗糙场的映射算法的规范,修改邻域搜索所使用的搜索公差,缺失构件处理的规范,其他映射参数。
用户帮助文档中新关于Field Mapper章节。
● 协同仿真服务(CSS)现在允许客户端在即将到来的目标时间同步写入重新启动信息,其解决方案在求解器之间处于平衡,这是由Abaqus求解器支持的,当第三方求解器采用此功能时将可用。
● 场以下输出标识符已被修改,以与Abaqus的输出约定相一致。
1. NT-节点温度(热程序为11,非热程序现场温度)。
2. TEMP是单元温度,由3DSFlow使用;Abaqus结构求解器不再支持它。
3. P为表面压力。
● Abaqus/Standard 可以导入和可视化的牵引力矢量。
➨ Use TRVEC➡TRVEC
1. 当需要在原网格和目标网格中显示和比较牵引力的时候
2. 当源网格和目标网格具有相似的网格密度时,可以提供准确的结果
3. 在载荷刚度对大型变形分析很重要的时候有好处
➨ Use TRVEC➡CF (concentrated forces)
1. 当目标网格比源网格更粗时,可以提供更准确的结果。
2. 你不需要显示或比较原始和新的场输
3. 不能轻易地进行比较,集中力大小取决于目标网格尺寸
● 在映射元素数量时,您可以得到整个元素的常量值:
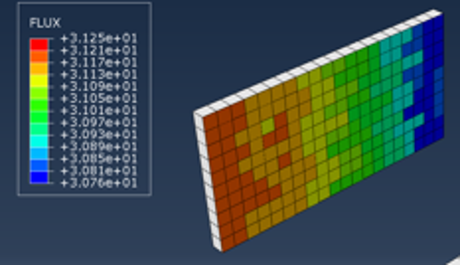
-END-


