Ansys Lumerical | 光子晶体布拉格光纤仿真应用

01 说明
FDE求解器可用于精确计算任意复杂结构的模式,包括光子晶体布拉格光纤。在此示例中,我们计算并分析了Vienne和Uranus描述的光子晶体布拉格光纤的模式。
02 综述
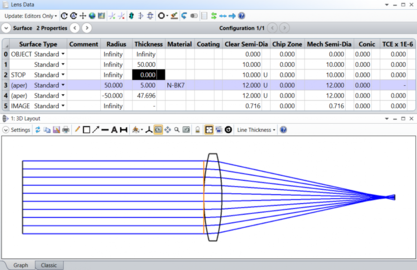
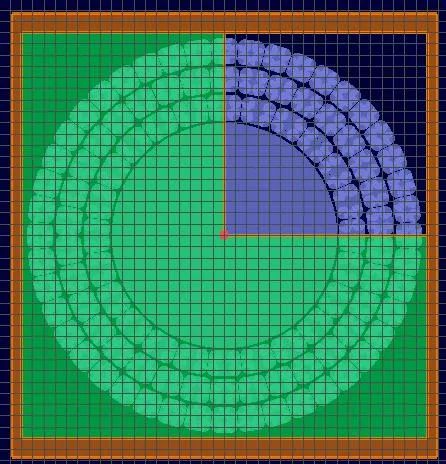
模拟文件bragg_PCfiber.lms包含一个参数化组对象,可以进行结构建模。最初,在x-min和y-min处使用反对称边界条件以及在x-max和y-max处使用金属边界条件设置模拟。反对称边界条件允许我们仅模拟1/4的结构,从而节省时间。但是,我们必须注意不要漏掉可能需要对称条件或对称和反对称条件的组合的重要模式。
03 运行和结果
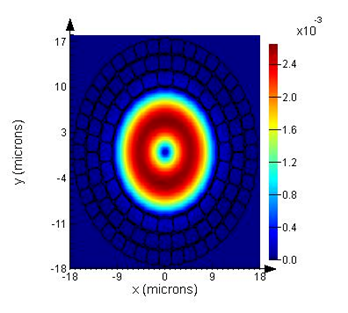
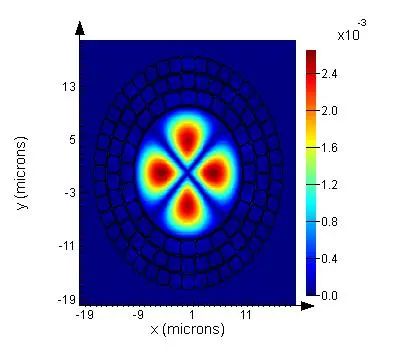
首先,我们运行仿真并切换到分析模式。我们看到其中一种导模的有效折射率约为0.998。下面是圆柱坐标系中的Hr图。
要研究此类结构的损耗,需要在x-max和y-max处的边界条件设置为PML,如下所示。我们最初没有这样做,因为它会增加计算时间,并且会更难找到导模的有效折射率。当我们重新计算模式时,我们可以查看折射率0.998附近并发现不同的模式。
模式

Hr
Hphi
模式
Hr
Hphi
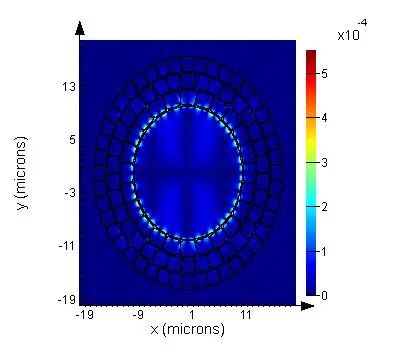
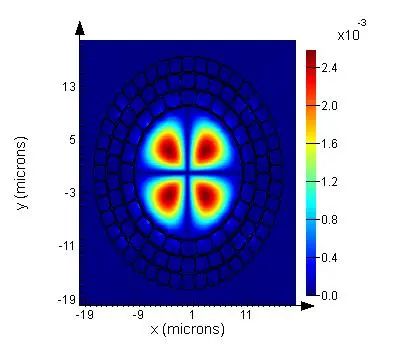
软件会计算出将近20种模式。模式7是 。模式8是
。模式8是 。上图显示了磁场的径向和角分量,可以与Uranus等人的结果进行比较,我们将有效折射率和损耗与Uranus等人的结果进行比较。
。上图显示了磁场的径向和角分量,可以与Uranus等人的结果进行比较,我们将有效折射率和损耗与Uranus等人的结果进行比较。

MODE有效折射率结果与Uranus等人的结果非常接近。对于这种对数值网格的微小变化(以及实际制造缺陷)非常敏感的结构,计算损耗则更加困难,并且需要进行一些收敛测试才能找到更准确的结果。
收敛测试
我们首先将感兴趣的两种模式复 制到全局DECK中,并将它们重命名为TE和HE,如下所示。
现在可以通过运行优化和扫描来测试收敛性。扫描通过增加网格数目来多次计算模态。在每一步,它都会计算一遍模式,然后将与我们已经存储在DECK中的模式具有最佳重叠的模式识别为和模。然后,记录这些模式的有效折射率和损耗,作为所使用的网格数目的函数。
最终结果如下所示,可以在Visualizer中绘制。
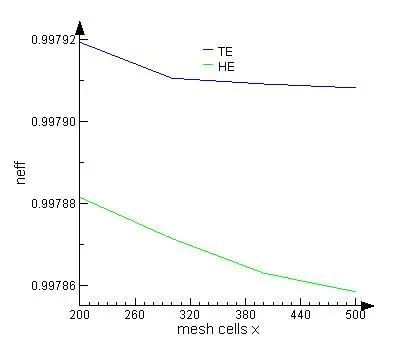
有效折射率 vs 网格数目
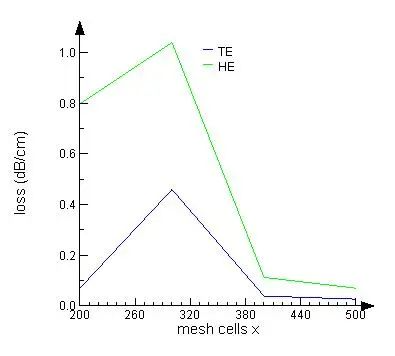
损耗 vs 网格数目
我们看到,当我们达到500x500网格数目时,有效折射率开始收敛,但需要更多的网格数目才能获得更高的精度。根据计算机上的内存量,可以将测试的最大单元数增加到 600x600或更多。损耗随着网格单元数增加而变化,但也开始在500x500网格数目下收敛。同样,可能需要进一步增加网格单元的最大数量以获得更准确的最终结果。500x500网格单元的结果是:

有效折射率的一致性非常好,损失正在向Uranus等人的结果收敛。