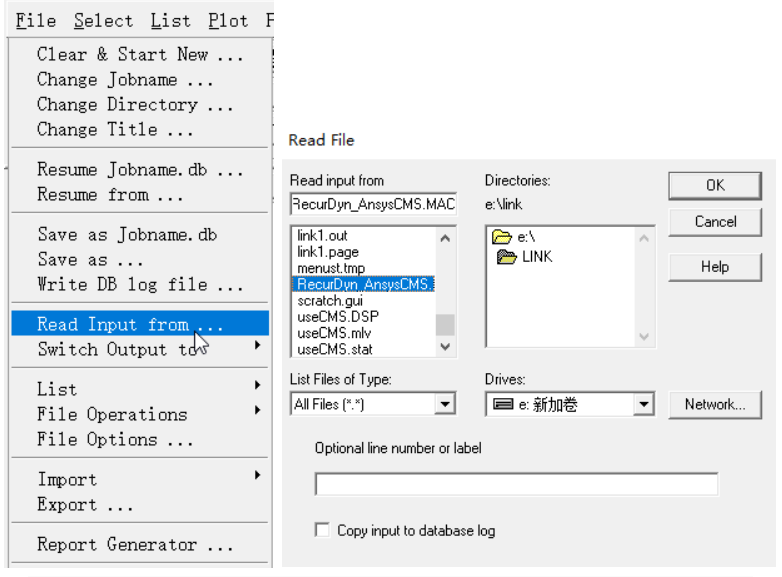
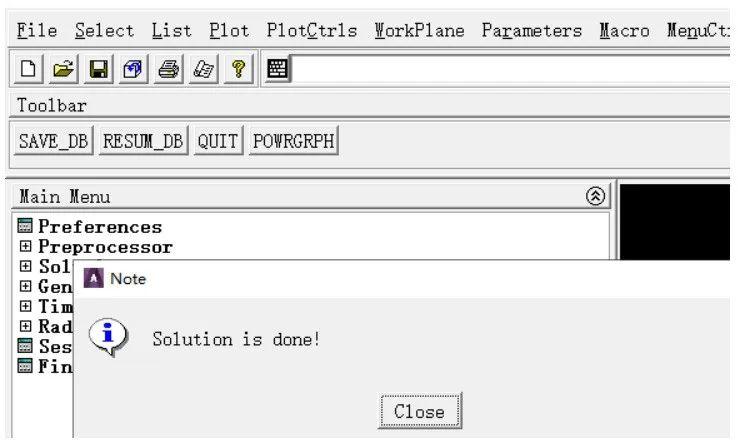
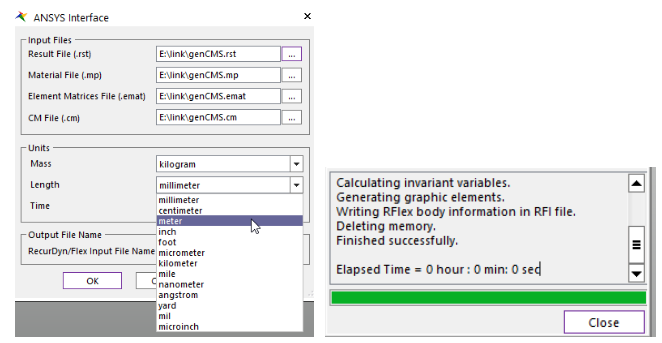
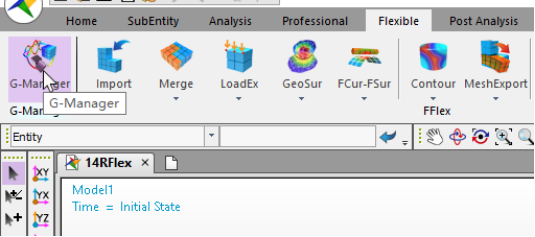
基于RecurDyn机器人简易参数化模型及刚柔耦合案例分析





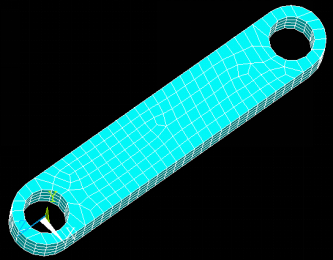



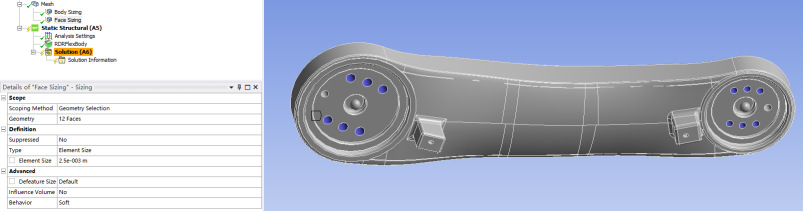
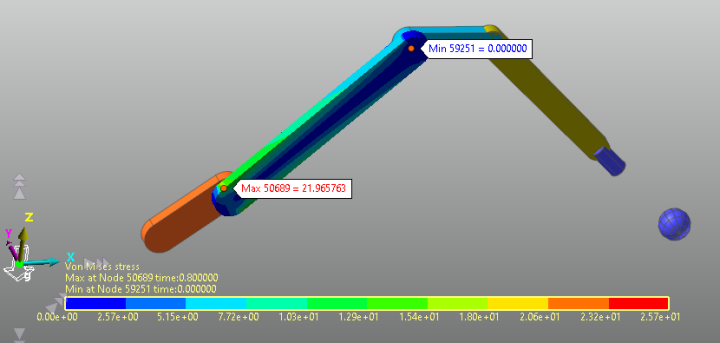 机器人运动过程中某个时刻大臂连杆的应力
机器人运动过程中某个时刻大臂连杆的应力以下是讲座安排
工业品机器人仿真(四):机器人轨迹规划及机械仿真案例-仿真秀直播

登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-02-24
最近编辑:2年前

技术圈粉 知识付费 学习强国

2条评论

签名征集中
大佬级别 请问一下RDRFlex插件能提供一下吗 466330117@163.com。最近搞这个rfi,ansys经典方法搞定了。workbench及ug生成rfi都没搞定,RDRFlex插件也找不到下载地方。恳请大佬支持,万分感谢

签名征集中
请问有模型吗
相关推荐
最新文章
热门文章
