构建自动驾驶的“精准时空”


高精度地图
高精度地图(HD Map,High Definition Map),是一种专门为自动驾驶服务的地图,具有更加丰富细致的道路信息,可以更加精准地反映道路的真实情况。与传统地图相比,高精度地图的图层数量更多,图层内容更加精细,具有格式化存储的数据结构。


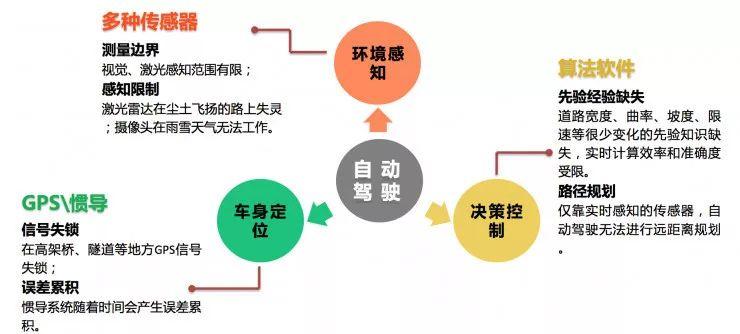
自动驾驶存在问题
自动驾驶主要包括三个部分:感知–>决策–>执行,其中,决策是自动驾驶的大脑,而感知是信息输入,包括GPS、雷达、摄像头等信息输入。人工智能和传感器技术为自动驾驶的发展提供核心驱动力,并深度应用于感知、定位、决策等环节,显著提高了汽车智能化水平。自动驾驶技术中安全问题是重中之重,当前自动驾驶存在很多不稳定因素,具有鲁棒性缺陷问题。

自动驾驶与高精度地图
在无死角、无限性、全天候、全天时情况下仍能保持正常工作,高精度地图凭借自身得天独厚的优势完成对自动驾驶系统中传感器的增强与补充,主要体现在地图视觉,消解传感器误差,更丰富的细节、更全面的感知三方面。不同等级的自动驾驶对地图的需求各不相同,高精度地图是L3级及以上级别自动驾驶不可或缺的重要支撑。

高精度地图的结构
高精度地图提供详细的地图数据,真实地反映道路的实际样式,包含更多的图层数量和道路数据,图层描绘也更加细致。高精度地图由道路、车道、安全辅助和道路交通设施四部分数据构成,其内容根据精度的不同,显示的内容也不尽相同。


高精度地图的应用
高精度地图是自动驾驶发展的重要支撑,也是自动驾驶的核心技术之一。与高精度地图一并而来的是高精度定位,并且在自动驾驶系统中发挥着重要作用。高精定位一方面帮助自动驾驶系统更好地使用高精地图提供的信息,为自动驾驶系统的路径规划和车辆控制提供准确的车辆位置和姿态;同时可以辅助感知系统,得到更加准确的检测和跟踪结果。

作为自动驾驶的记忆中枢,高精度地图不仅能够确定车辆的绝对位置还能提供超视距的感知,进而将先验知识加入到自动驾驶汽车中,进而才能进行决策和判断。高精度地图定位过程中,定位方法通常可分为:点云定位和视觉定位。

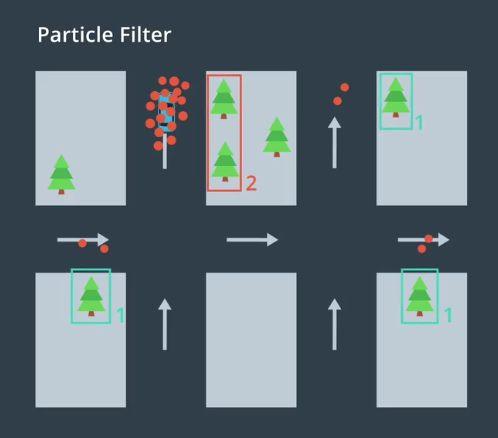
点云定位

对传感器输出的点云信息进行识别得到车辆与识别物的相对位置,进而与高精度地图中相应识别物进行匹配获得高精度的定位信息。
视觉定位
1. 通过识别道路上的特征(标识牌、箭头等)与高精度地图中的信息进行匹配获得高精度的定位信息。
2. 通过识别道路的车道线与高精度地图中的车道信息进行匹配可以精确的确定车辆行驶的车道。
高精度地图直接影响着自动驾驶系统的安全性、可靠性,以及效率。拥有高精度地图信息后,自动驾驶系统就可以比对车载GPS、IMU、LiDAR或摄像头数据来实现当前位置的精确定位,并进行实时导航。自动驾驶的道路任重而道远,作为自主品牌研发的成员,我们需要齐心协力为自动驾驶的发展贡献智慧与力量。