某车型高速行驶方向盘摆振分析
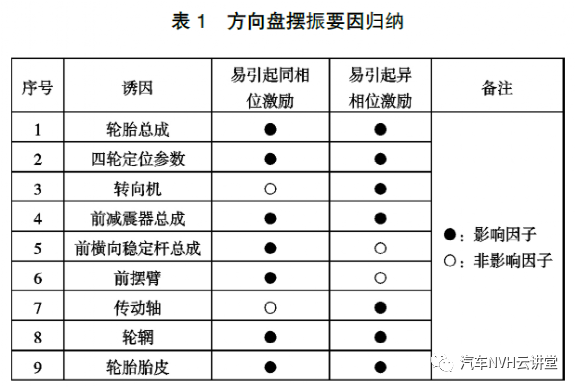
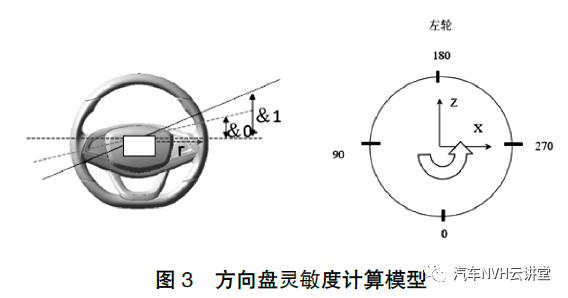
摘 要:研究高速行驶方向盘摆振影响因素与测试方法。针对某款乘用车方向盘摆振的现象进行原因分析,通过对其进行道路再现试验,测试分析轮胎至方向盘的灵敏度,可知该车对轮胎异相位的激励非常灵敏;以副车架为参考点,建立模型,通过ODS 分析进一步验证摆振产生原因。该研究为高速行驶方向盘摆振问题的解决提供依据。方向盘在特定的车速下发生的回转摆动或振动现象称为方向盘摆振。摆振是一种十分有害而又经常遇到的振动现象,不仅严重影响整车的NVH 性能,引起消费者抱怨,对汽车的安全性、操纵稳定性等也有一定的负面影响,严重时甚至会引发安全事故[1]。在车辆直线行驶时,易发生方向盘摆振现象,且直线稳速行驶距离越长,越容易出现摆振现象。市场上某款乘用车以车速110km/h 行驶时,方向盘摆振现象非常严重。道路情况愈复杂,方向盘的摆动愈剧烈,直接影响驾驶员的正常驾驶[2]。当前对摆振的研究基本从激励源及影响因素展开,文章针对该问题进行研究,为设计工程师提供参考。但如何在设计初期实现对摆振的预测及控制,仍需进一步的研究。方向盘产生摆振的原因较为复杂,主要原因为行驶系统、转向系统和驱动系统中的一个或多个部件存在着问题。根据项目开发经验积累,方向盘摆振现象的影响因素总结见表1。行驶系统中旋转部件,如轮胎、制动盘的动不平衡是方向盘摆振的较大影响因素,且对转向轮的跳动和摇摆都有影响。如果存在动不平衡的问题,那么轮胎每转动一周就会产生一次激励,当激励频率与转向轮绕主销振动的固有频率相近时,就会发生强烈的前轮摆振,进而导致方向盘产生摆振现象[2]。前轮定位参数包括前轮前束、前轮外倾角、主销内倾角和主销后倾角四个要素,且不同型号的车辆参数值各不相同。如果前轮定位参数失常,破坏了转向轮的稳定效应,那么前轮会发生摆振,从而导致方向盘产生摆振现象[2]。分别在方向盘3 点、9 点布置三向加速度传感器,在左右前轮轮辋垂直方向0 点各布置15g配重块,左右前轮胎侧布置光电传感器。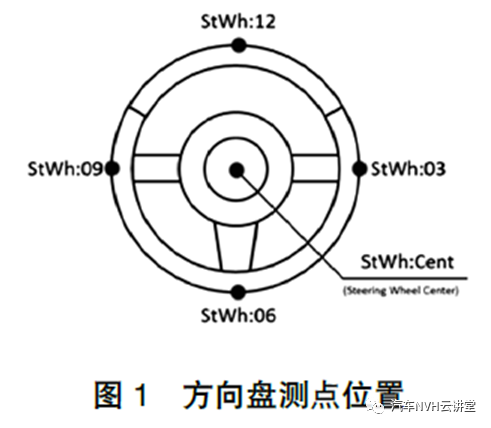

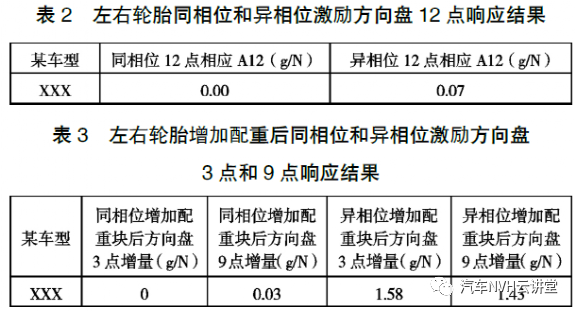
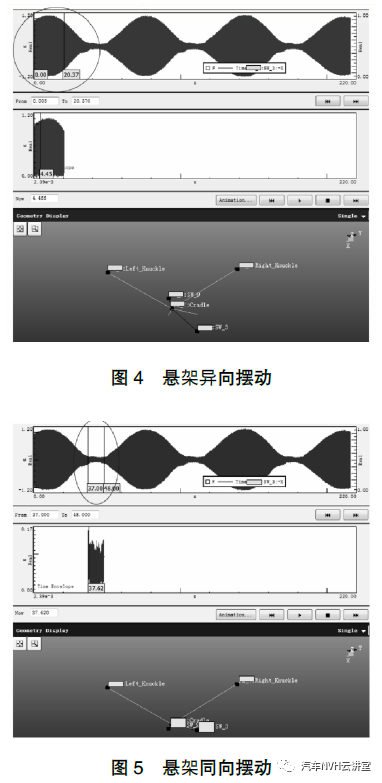
工况1:用光电传感器跟踪轮辋,保证两个轮胎所配配重块同向运动,测试方向盘的振幅;
工况2:用光电传感器跟踪轮辋,保证两个轮胎所配配重块反向运动,测试方向盘的振幅;在0 点位置布置配重块,A0 点的响应为(&1-&0)/mR。其中&1=arctan((X1(配重)-X0(配重))/2r);&0=arctan((X1-X0)/2r);X1(配重)为3 点加速度计测得的x向1 阶振动幅值(轮胎上布置配重块后);X2(配重)为9 点加速度计测得的x向1 阶振动幅值(轮胎上布置配重块后);同理,可以计算出A90(3 点位置)、 A180(6 点位置)、A270(9 点位置)处响应。某车型对左右轮胎同相位和异相位激励方向盘12 点响应结果见表2,对增加配重块后方向盘3 点和9 点增量见表3。从上述结算结果可知,该车型对左右轮胎同相位的“插入参量”不敏感,对异相位的“插入参量”敏感,即该车型对轮胎异相位的激励非常灵敏。为进一步验证轮胎异相位激励是引起方向盘摆振的主要原因,进行实车ODS 测试分析:分别在问题车方向盘3 点、9 点、左右轮心位置位置布置三向加速度传感器,以副车架为参考点,建立模型,对测试数据做ODS 分析。ODS 测试分析结果见图4 和图5。图4,通过ODS 振型可知,0~20.37s是方向盘摆振的最大值段,此时悬架呈异向位置摆动;图5,通过ODS 振型可知,37~48s是方向盘摆振的最小值段,此时悬架呈同向位置摆动。从振动的传递路径可进一步确定,该车型方向盘摆振现象的第一要因是轮胎异相位的激励。通过对某款乘用车高速行驶方向盘摆振问题产生的原因进行研究,得出轮胎异相位激励是产生该问题的第一要因,故需要对轮胎侧向力(LFV)、轮辋动不平衡残余量、轮胎总成动不平衡残余量以及轮辋与轮毂轴承配合间隙进行控制。由于引起方向盘摆振的因素是多种多样的,因此为避免摆振问题发生,还应按表1 所列的内容对其他因子进行严格把控。作者单位:(1.湖南智点智能新能源汽车有限公司,湖南 株洲 412007;2.乌 鲁 木 齐三禾恒信工程技术有限公司,新疆 乌 鲁 木 齐 830026)免责申明:本公 众 号所载文章为本公 众 号原创或根据网络搜索编辑整理,文章版权归原作者所有。因转载众多,无法找到真正来源,如标错来源,或对于文中所使用的图片,资料,下载链接中所包含的软件,资料等,如有侵权,请跟我们联系协商或删除,谢谢! 著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2023-04-15
最近编辑:2年前
作者推荐