基于Simpack与Simulink联合仿真的轨道车辆半主动控制

本文摘要(由AI生成):
本文介绍了高速列车二系横向减振器的半主动控制方法,基于天棚阻尼控制原理,旨在提高列车运行的平稳性和舒适度。在Simulink和Simpack软件中进行了设置与仿真,通过设置传感器、输入输出量、力元及端口,实现联合仿真。结果表明,相比被动减振,采用半主动控制后,车体的横向加速度显著降低,有效提升了列车的平稳性和乘客的舒适度。
半主动控制方法很多,其中天棚阻尼控制是应用最广泛的一种,它是由美国加州大学戴维斯分校的D.Karnoop教授首先提出的一种控制方法,下图为其原理图。
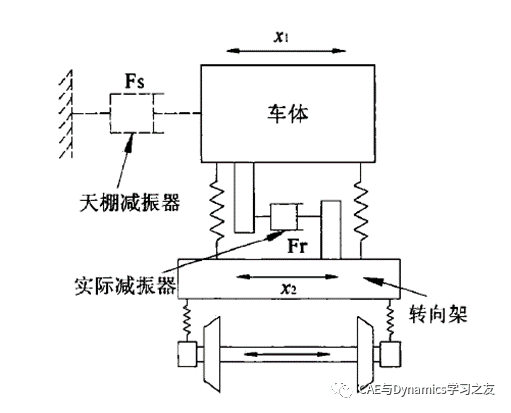
由图可知,车辆运行过程中,天棚减振器的一端连接车体,另一端固定在虚拟墙体(即天棚)上,无论车体的振动方向如何,天棚减振器产生的阻尼力始终对车体振动起抑制作用。其输出阻尼力可表示为:

可在实际生活中,车体是随时运动着的,无法固定连接在虚拟墙上,所以实际减振器可通过车体和转向架之间的连接来实现。被动悬挂的阻尼力可以衰减车体振动,但阻尼力的方向有时和车体振动的方向一致,从而导致车体的振动进一步恶化,这时就需要将阻尼力反向,但现实中不存在负的阻尼系数,因此在天棚阻尼控制中,选择将此时的阻尼力输出为零,以防止其增加车体振动。其输出阻尼力可表示为:
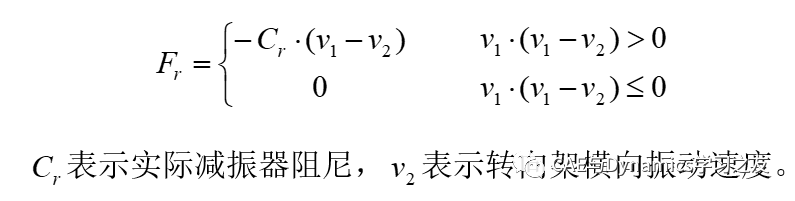
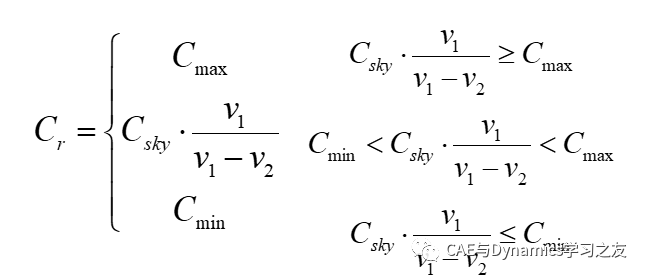
根据天棚阻尼控制原理,要使实际减振器输出的阻尼力尽可能地接近理想天棚减振器的阻尼力,即Fs=Fr,所以实际减振器的阻尼和天棚减振器的阻尼的关系为:

对上式分析:v1-v2有可能为零或极小值,此时Cr接近无穷大,超出实际可调阻尼的最大值,而且最小阻尼也不可能做到零。所以,实际横向减振器的阻尼系数是有范围的,为此我们设置了Cmax和Cmin,以使减振器阻尼系数在一个合理的范围之内。综上,实际天棚阻尼控制方法的表达式为
以上为原理部分。本文是针对高速列车二系横向减振器的阻尼进行半主动控制,以提高列车运行平稳性。
以下是在软件Simulink和Simpack中的设置步骤:
首先在Matlab-Simulink中设置:
(1) 运行Matlab,选择以下路径(基于Simpack默认安装路径):
C:\ProgramFiles\Simpack-2018\partners\mathworks\simat,在命令窗口输入:simat,弹出界面:

特别需要注意:新建一个Model,把以上方框图copy到新建的Model中(因为刚才打开的是唯一的simat文件,如果直接在simat文件中建联合仿真,以后输入simat就只能打开这个文件了)。

显示没有与Simpack连接上(Connected to SIMPACK:no),暂时不用管。

其次在Simpack中设置:
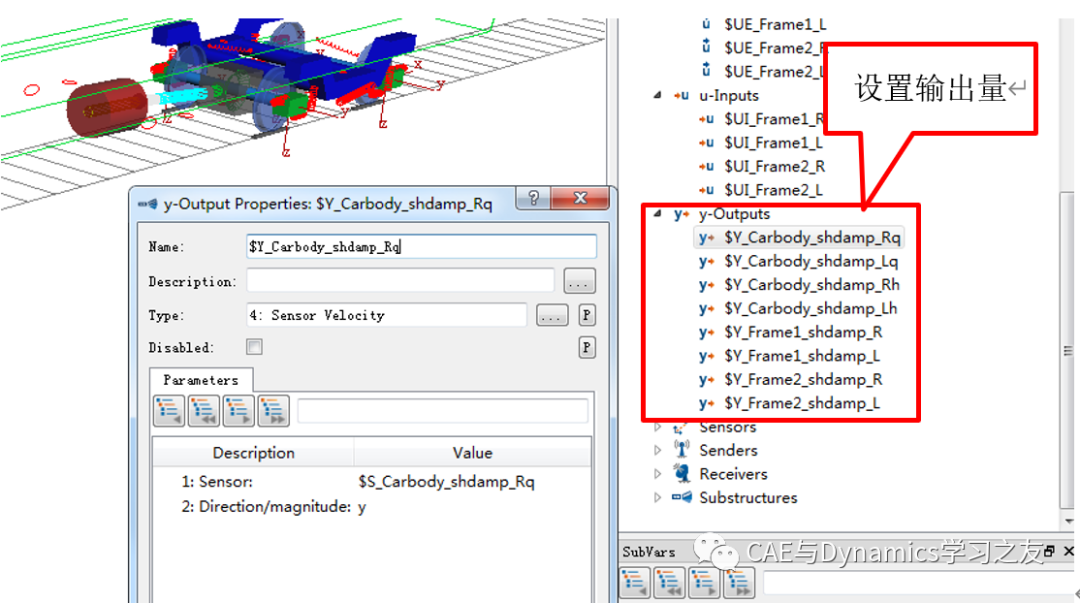
(2) 打开Simpack,设置传感器,把需要设置的输出量(8个)用传感器识别出来:在车体、构架的横向减振器位置设置输出量(y方向的速度)。
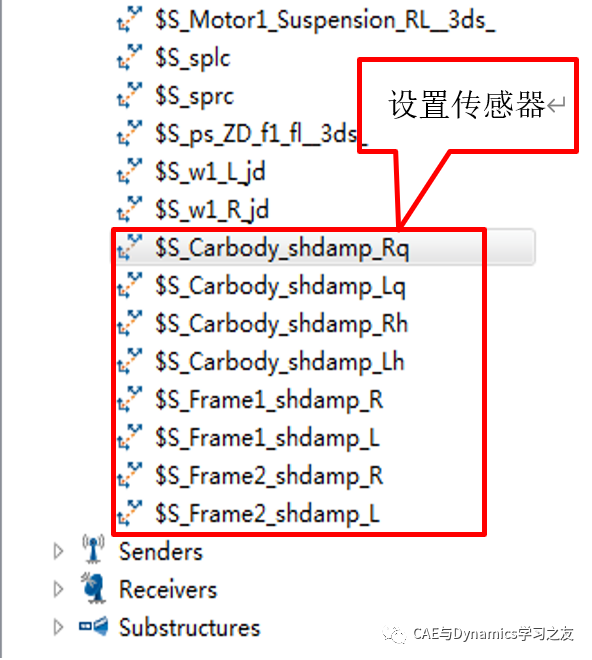
(3) 设置8个输出量y-Outputs。把步骤(2)中的8个传感器设置输出量。
(4)设置4个输入量u-Inputs。

需要注意的是:每创建一个输入量u-Inputs,都需要单击“create”一下,会自动创建一个u-Vector(力元能识别,下一步要设置),这个u-Vector与u-Inputs相关联。
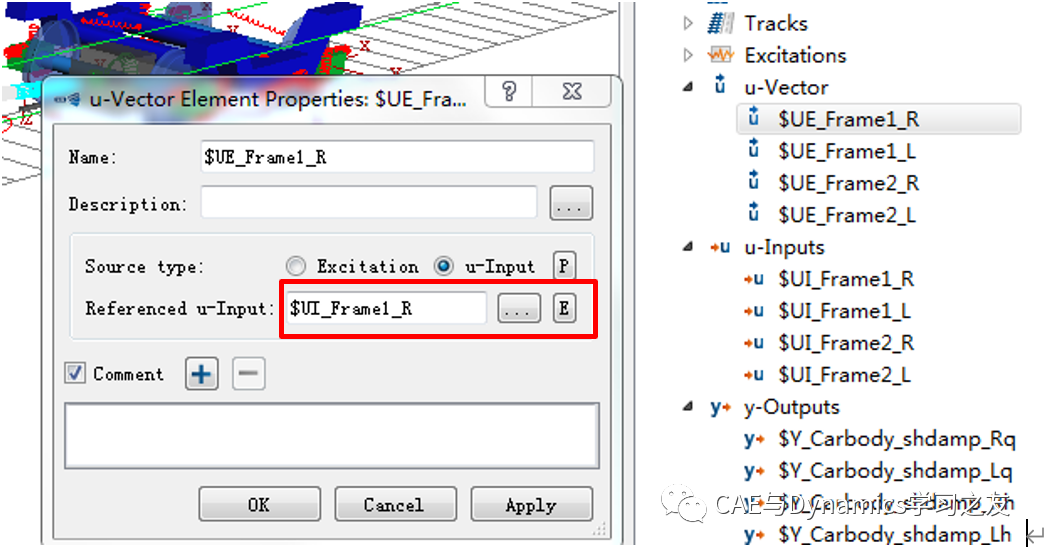
(5) 创建4个力元。选择94号力元,在“u-Vector Element force”栏选择上一步创建的u-Vector。

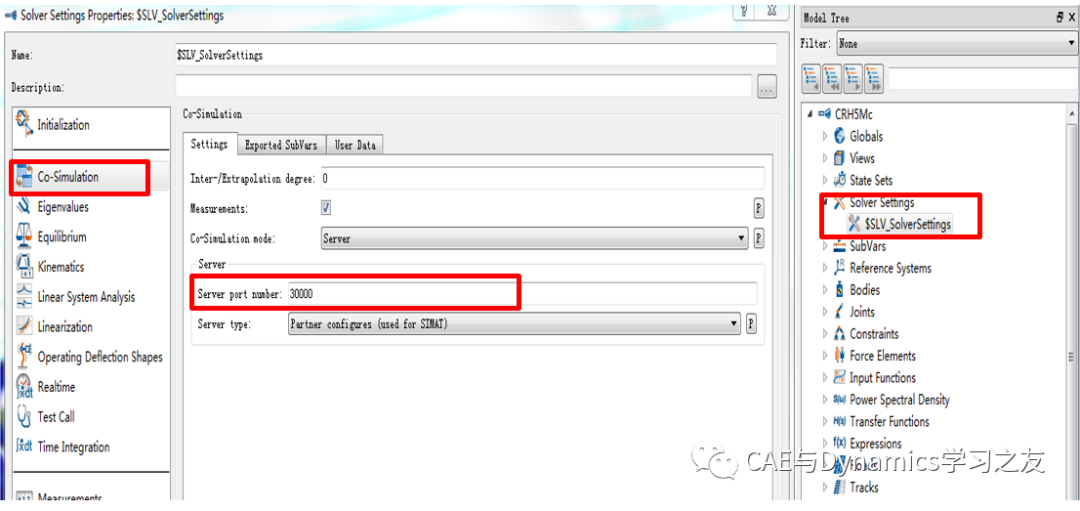
(6) 设置Simpack端口。在Solver Settings中选择Co-Simulation设置端口号:30000(这个值随便设置,只要与步骤(8) 中设置的一样即可)。
(7) 在Simpack建模窗口菜单栏:Solver>Co-Simulation>Start Co-Simulation

弹出计算界面:

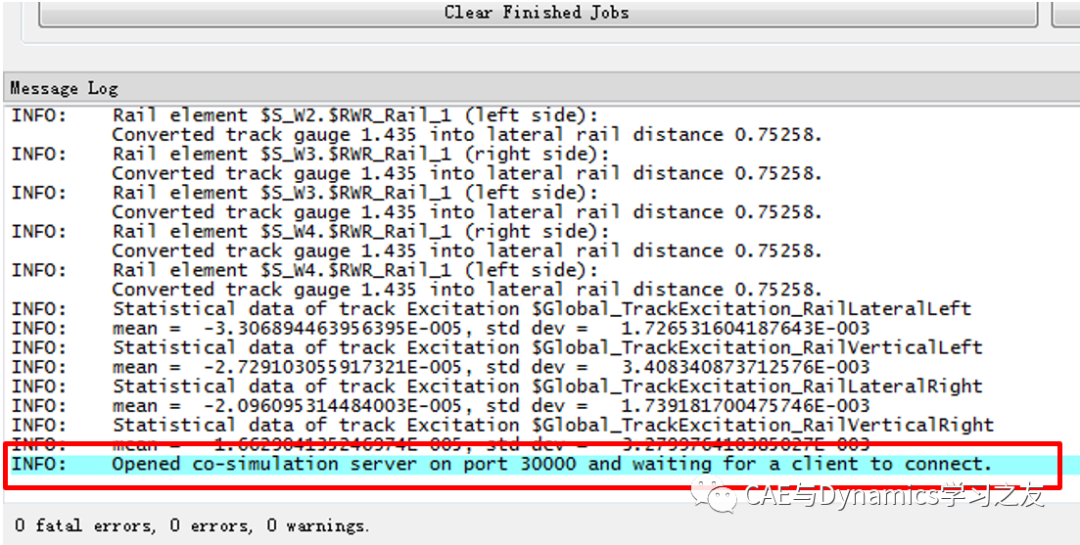
计算完成后,显示:打开联合仿真端口,等待连接。
最后回到Simulink中来设置:
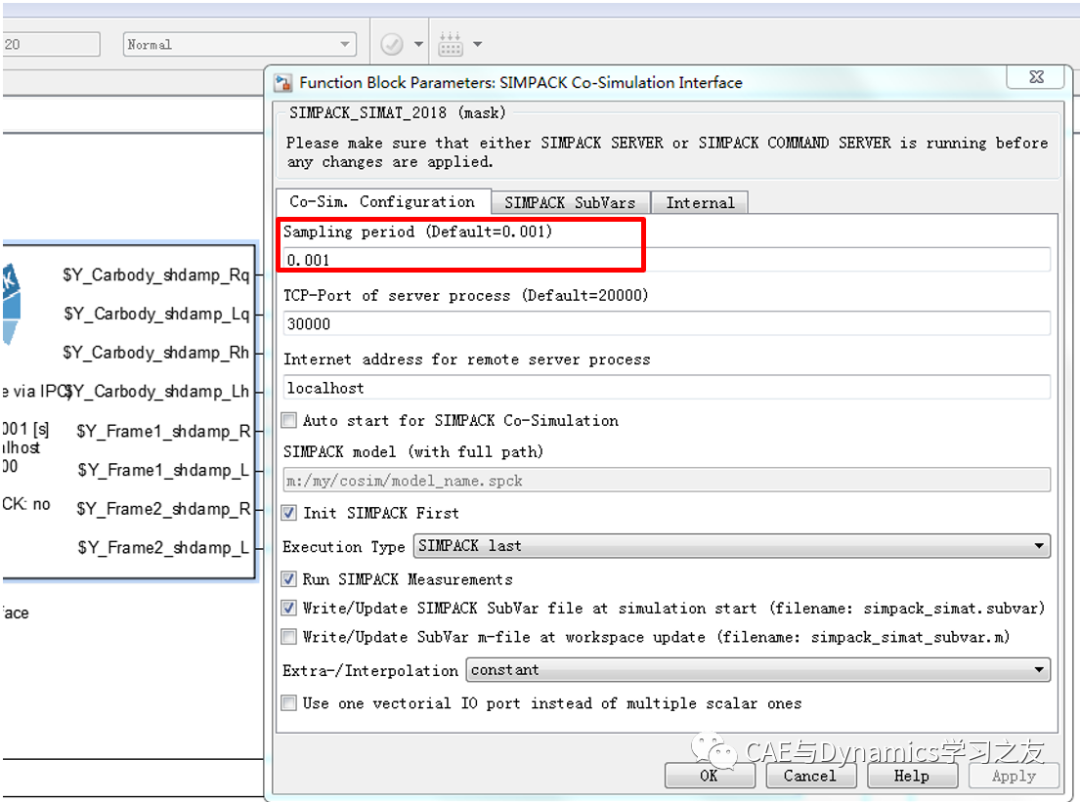
(8) 在simat界面(步骤(1)创建的)双击方框图(一开始显示没有连接上),输入端口号:30000(与步骤(6)在simpack设置要一样),依次选择Apply, OK。
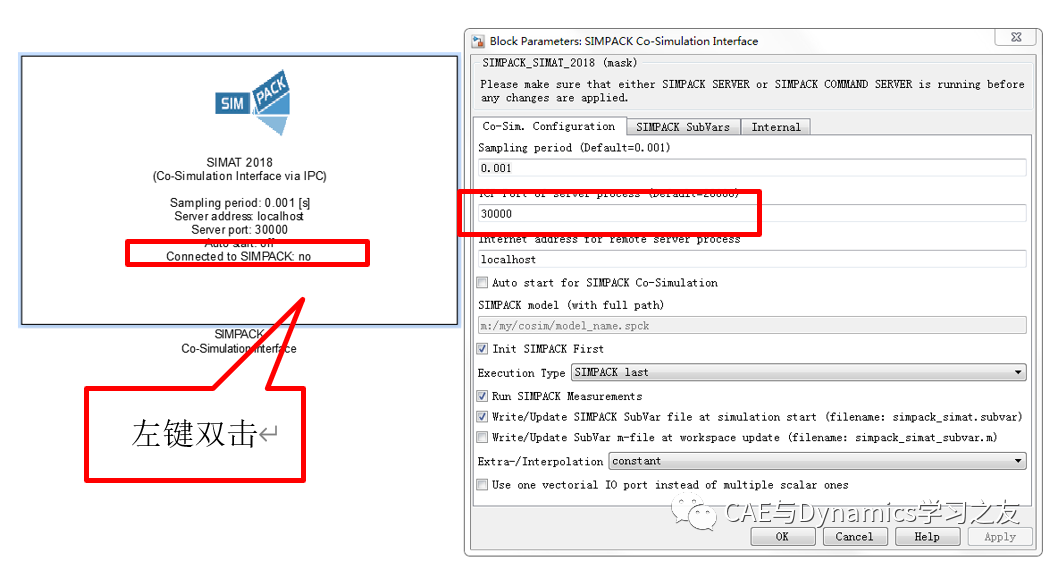
显示已经连上,自动把输出量、输入量加到了系统方框图上。

(9) 在Simulink中建立单个位置的控制系统流程图,再封装,copy3份,按照下图搭建完整的控制流程。

(10) 设置完成,开始运行。
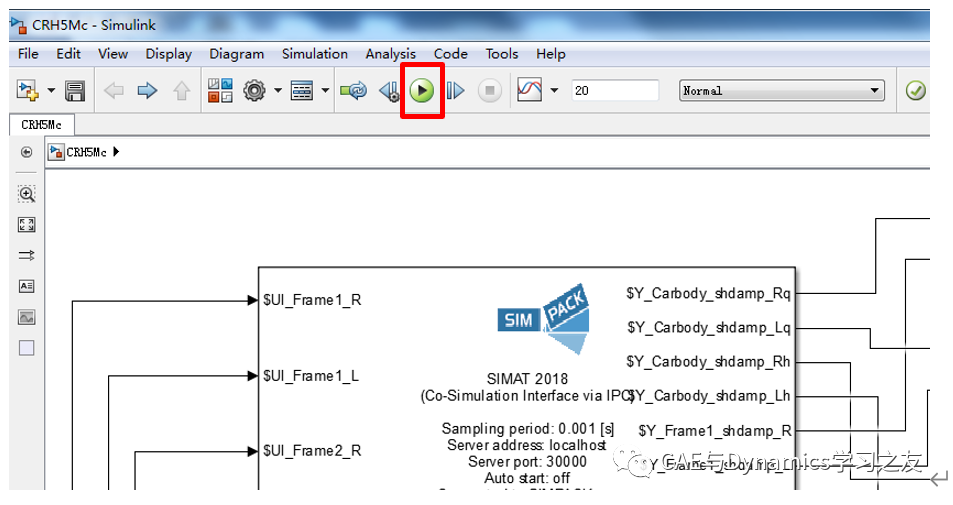
(11) 在Simpack中打开sbr结果文件,查看结果。

需要注意的是:计算过程采样频率(时间间隔)以Simpack中的设置为准,

不按照Simulink设置输出结果。
(12) 对比使用被动减振与联合仿真(半主动控制)这两种方法对车体加速度的影响。

从结果可以看出,使用半主动控制后,车体横向加速度大大降低了,有助于提高列车运行的平稳性与舒适度。



