LS-Dyna运动副---转动副与移动副及其驱动

本文摘要(由AI生成):
本文介绍了在LS-Dyna中如何建立刚体、转动副、移动副以及进行转动驱动,并讨论了运动副的失效形式。首先,通过选择节点并定义节点刚体组合方式,可以建立刚体。对于柔性体间的转动副和移动副,需在转动副目标位置建立刚体,并遵循一定规则定义转动副和移动副的节点。此外,还介绍了如何使用*CONSTRAINED_JOINT_ROTATIONAL_MOTOR卡片进行转动驱动,并探讨了运动副的两种失效形式:时间失效和受力与扭矩失效。这些步骤和设置对于在LS-Dyna中模拟机械系统的运动和力学行为至关重要。
“ LS-Dyna中的运动副仅仅可以建立在刚性体之间,也就是说,定义运动副的所有节点必须分别属于两个被该运动副所连接的刚性体。本文将联合使用HyperMesh与LS-prepost进行运动副定义。(其实他俩任意一款都可以独立完成该工作)”
如何建立刚性体?
如何建立转动副?
如何建立移动副?
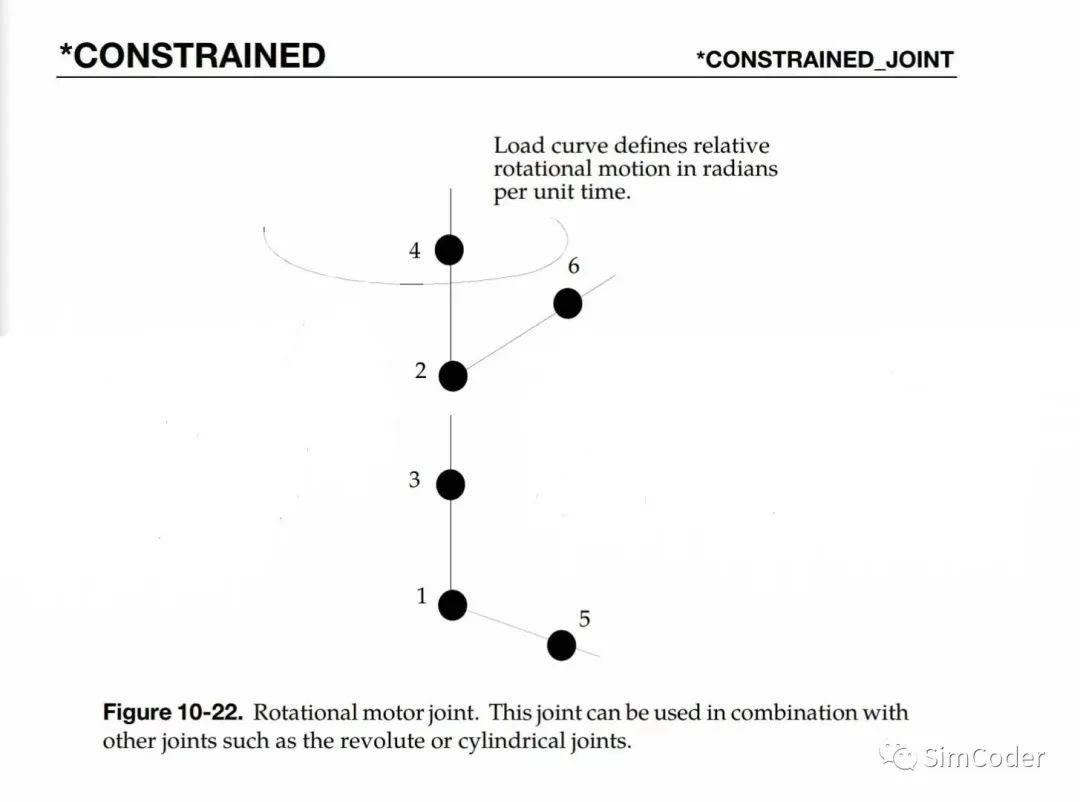
如何进行转动驱动?
运动副的失效形式
本文使用的简易模型如下:

01
—
如何建立刚体?
由有限元单元组成,定义方式为:为单元赋予刚性材料(20号材料)
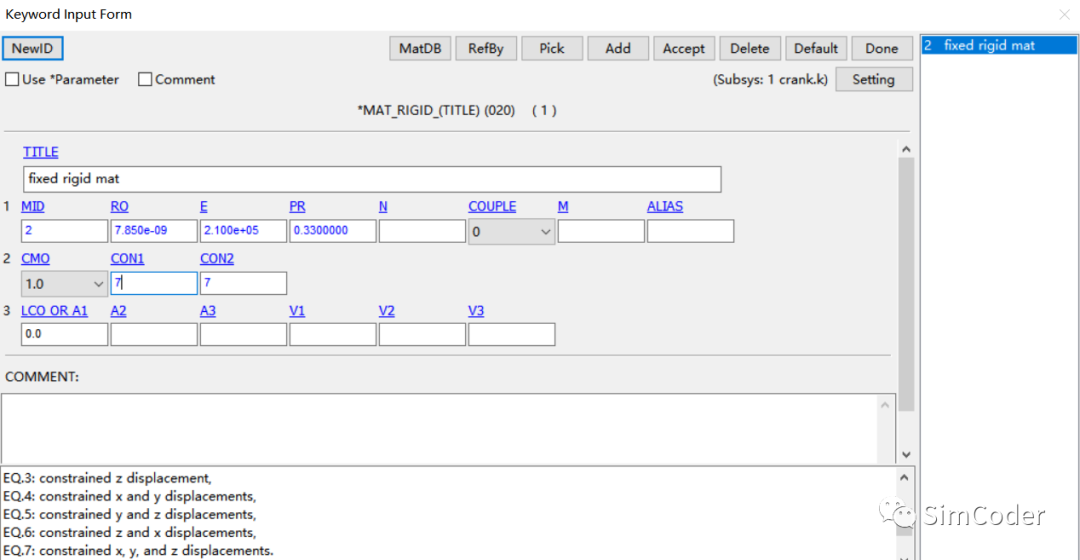
凡是被赋予该材料的所有部件(part)均被视为刚性体。
并可以通过定义材料属性来定义刚体移动/转动自由度:CMO,CON1,CNO2,如上图设置,可以实现被赋予该材料的所有刚体均被约束XYZ三方向移动及转动自由度。
由节点组成,即nodal rigid body,需要在CONSTRAINED中定义,由所定义的所有节点组成刚性体。由于HyperMesh操作节点及选择都特别方便,所以一般选择在建模阶段(即使用HyperMesh)就建立所需的nodal rigid body:CONSTRAINED-NODAL_RIGID_BODY
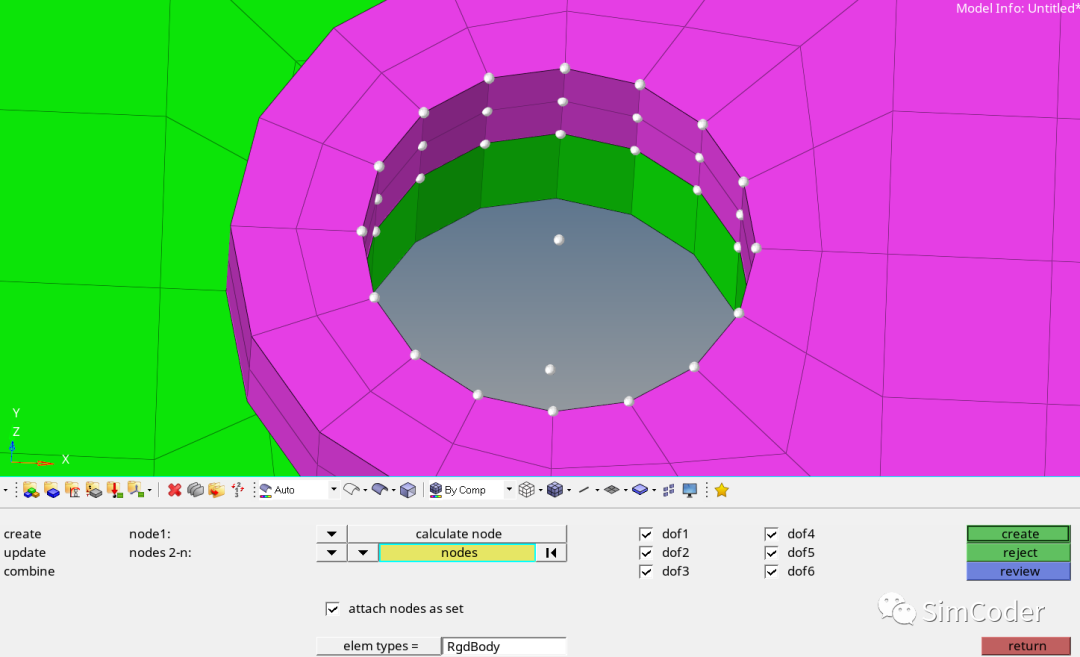
然后选择所有组成该刚体的所有节点,建立节点刚体
组合方式,可以通过在CONSTRAINED中定义EXTRA_NODE_SET,为已有的刚体拓展从属节点。

PID:选择需要拓展的刚体
NSID:选择想要被赋予刚体的节点set
02
—
如何建立转动副?

可以看出它的定义主要需要四个节点N1234,但是其具体的使用方法在卡片介绍中并未列明,我们需要查阅其相关的使用手册,得到如下解释:
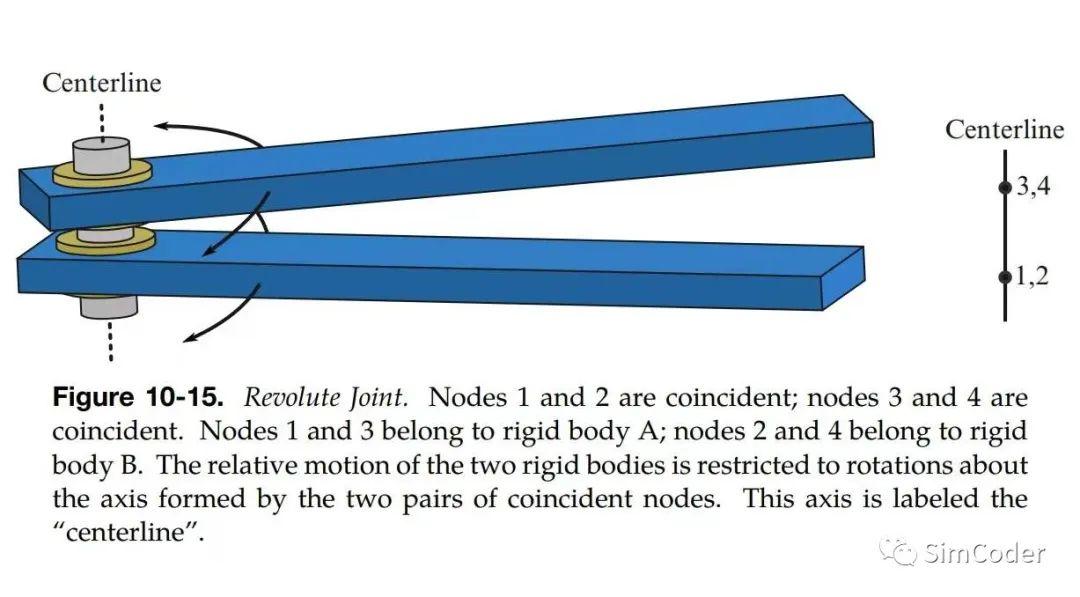
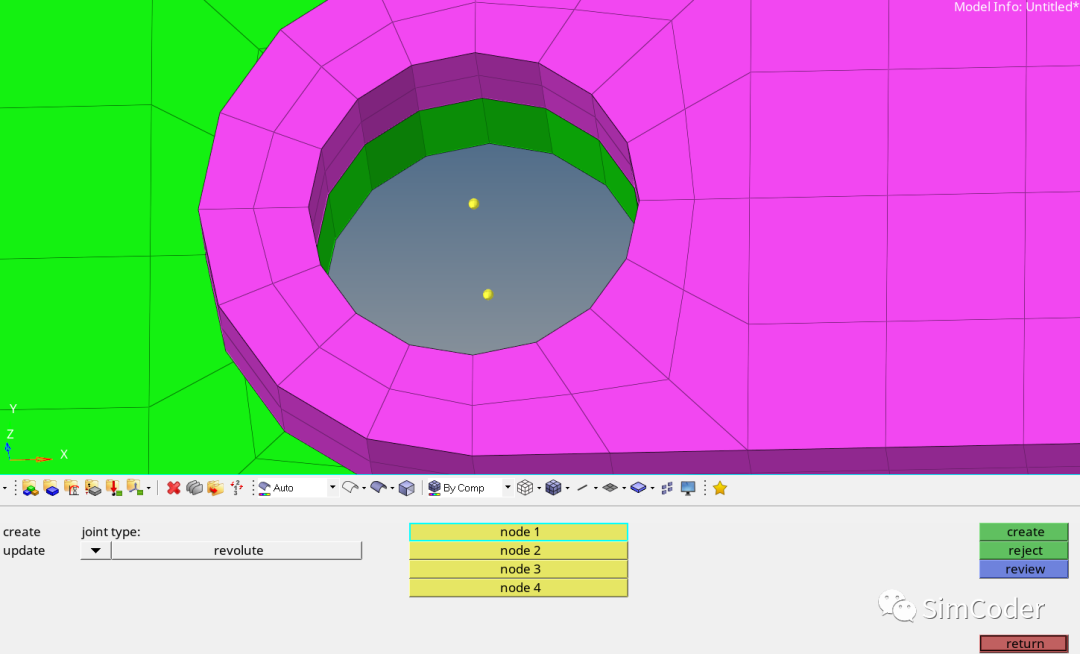
建立确定转动副轴线的四个点,要求符合转动副定义中的要求(即两两重回要求)。

建立nodal rigid body。此时应注意上图中两两重回的节点分别归属于哪个nodal rigid body,并且这个定义的顺序要用于转动副定义。
建立转动副。按照node1、2、3、4的顺序定义转动副,原则在于node1、2位置相同,node3、4位置相同,node1、3属于同一刚体,node2、4属于另一刚体。
03
—
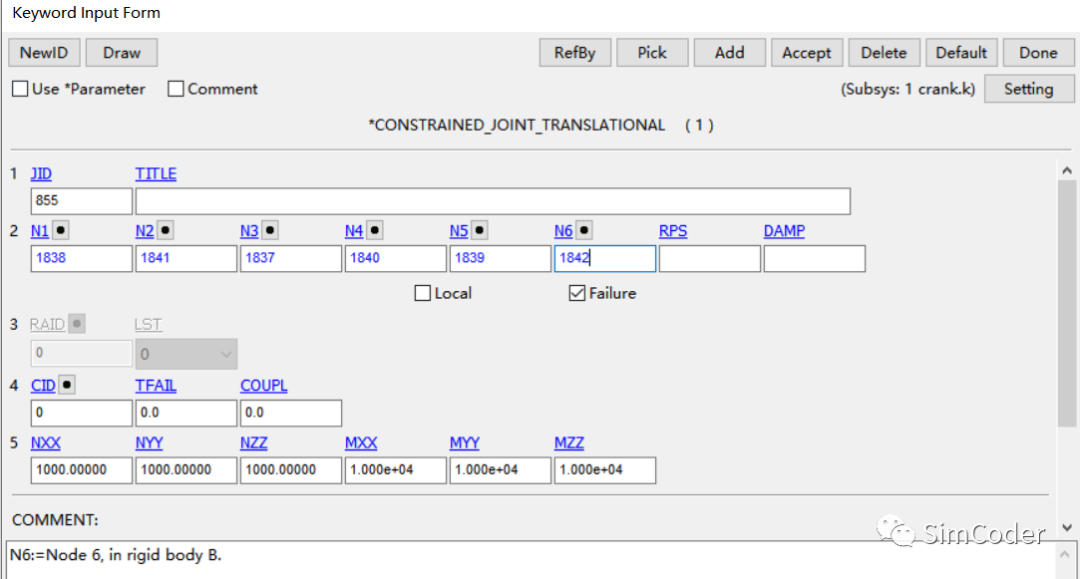
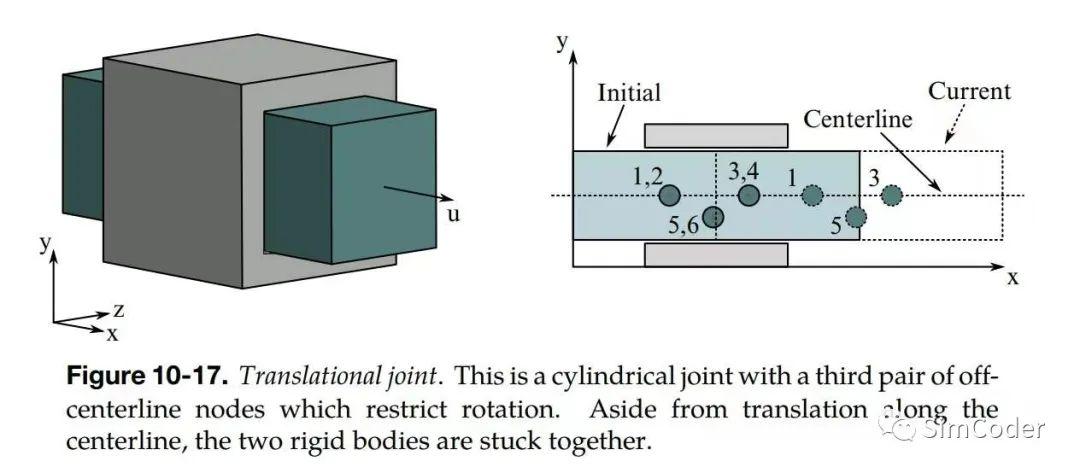
如何建立移动副?
04
—
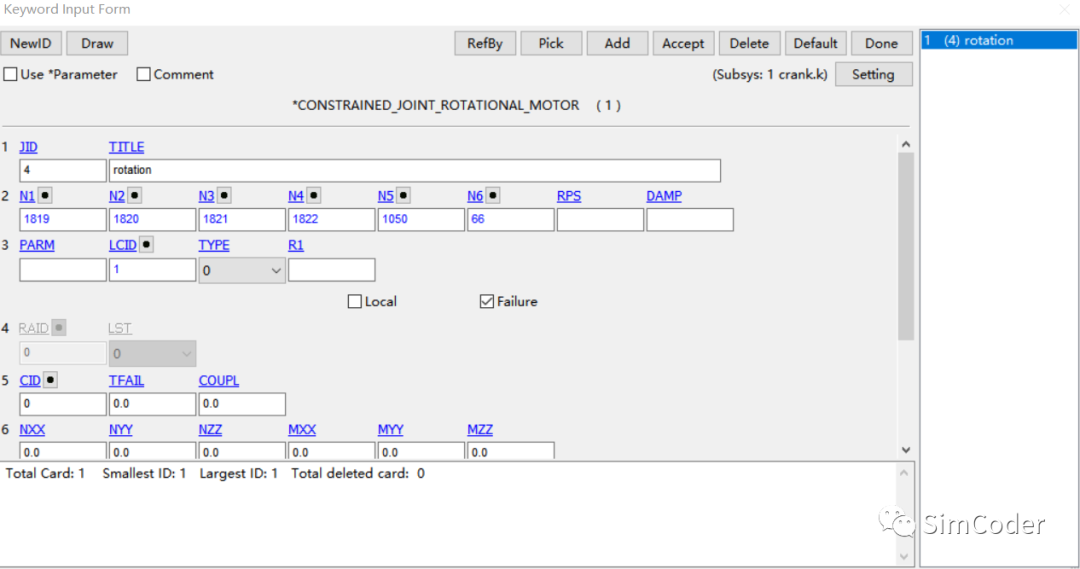
如何进行转动驱动?

05
—
运动副的失效形式

时间失效
为使得视觉效果明显,我将设置移动副在计算0.01s后失效,即TFAIL=0.01
受力与扭矩失效,COUPLE参数是决定力与扭矩算法的耦合方式
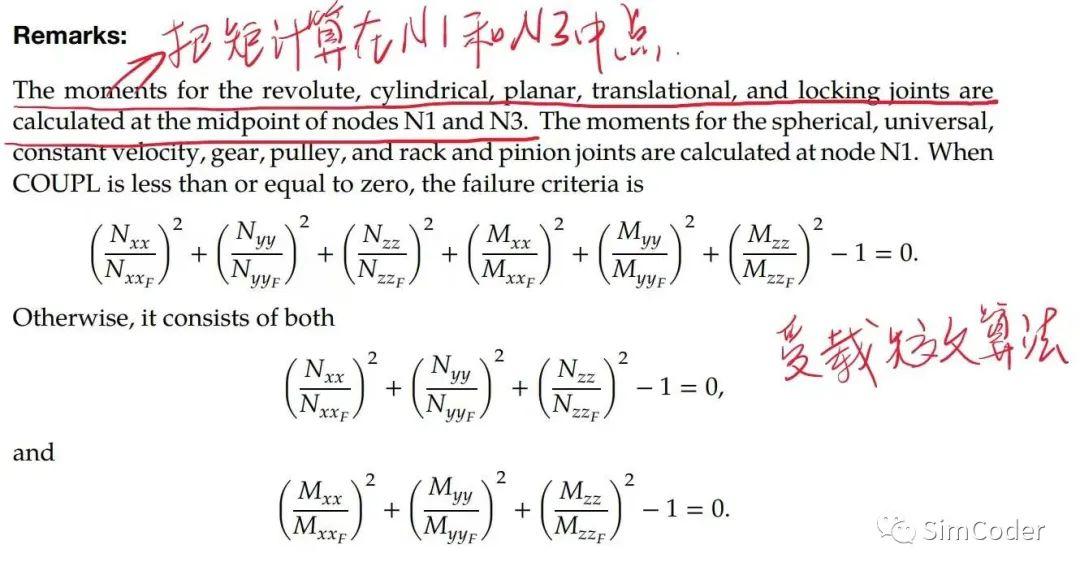
为演示,设置NXX,NYY,NZZ,MXX,MYY,MZZ均为1000,并设置TFAIL=0.,取消时间失效。

tips:
JOINT_ROTATIONAL_MOTOR也可以和普通运动副一样设置失效;
JOINT_ROTATIONAL_MOTOR必须和转动副或圆柱副配合使用,因为它只提供了加载,并未提供约束,如果单独使用(即取消ground2crank转动副),运动结果如下:



