案例 | 沃尔沃汽车公司使用Adams进行耐久性道路载荷仿真的新方法
耐久性测试是汽车产品开发中关键的一个方面。拥有回答“是否耐久”这个问题的能力不仅会影响零部件的设计,还会影响整个系统。在设计周期后期发现的耐久性问题需要花费大量时间和金钱来解决。如果在产品发布前未解决这些问题,则会产生保修成本并降低客户满意度。良好的耐久性通常会与其他属性(如,平顺性、操纵性或NVH)发生冲突,因此找到一种方法来平衡这些需求是必要的,也是困难的。
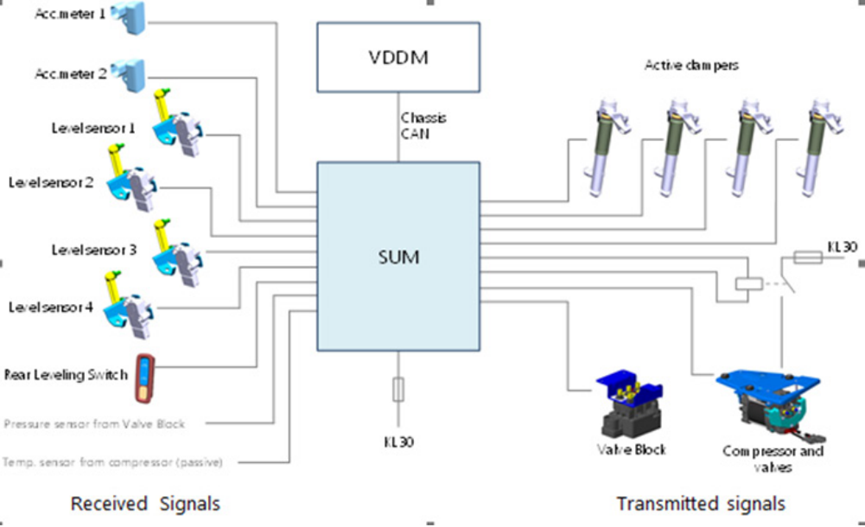
自1927年以来,沃尔沃汽车一直致力于为客户提供驾驶性能、舒适性和耐久性方面世界一流的车辆。车辆的耐久和强度是耐久性的关键方面。强度是承受高载荷时保持正常功能的能力,而耐久是指在长时间使用后保持正常使用的能力。沃尔沃汽车公司的耐久性部门负责确保车辆的强度和耐久。沃尔沃使用计算机辅助工程(CAE)进行产品开发,并使用仿真方法来验证车辆性能从而减少物理测试。Adams是沃尔沃耐久性部门选择的多体动力学仿真软件,由七名仿真工程师组成的小组来使用。模拟车辆强度包括计算车辆的峰值载荷。沃尔沃使用14个车辆工况计算底盘零部件上的负载。这些工况可分为垂向、侧向和纵向工况,比如“Drive Over Curb”(垂向)、“Braking into a pothole”(纵向)和“skid against curb”(侧向)。模拟车辆耐久性包括计算车辆的疲劳载荷。像强度工况一样,耐久工况可以分为垂向、纵向和侧向工况。一些工况可能会结合两个方向。对于SUV和越野汽车,还需要计算越野路况。60个模拟耐久性工况中包括Cobblestone、Washboard、Potholes、Stop and Go、Off-road Track、Slalom。准确模拟车辆运行过程中的道路载荷对于计算车辆的耐久性至关重要。通过使用Adams中的通道从仿真中采集道路载荷。这个通道就像仿真的端口一样,可以测量系统响应并直接在频域中输出结果。为了评估强度,提取峰值载荷,而对于耐久评估,损伤和等效力是关键因素。将收集到的仿真数据与参考值进行比较,参考值可以是其他车辆或是不同底盘设计的同一车辆。不同的小组使用计算出的道路载荷。输出文件与大量的文档一起发送给沃尔沃内部从事零部件级有限元分析工作的团队,并与外部的供应商共享。道路载荷用作有限元模型的输入,用于分析不同的车辆零部件。此外,在设计阶段前期没有测试数据的情况下,使用仿真载荷,进行系统级和零部件级的台架试验。为了实现满足各种道路条件下车辆动力学性能要求的车辆设计,现代的底盘系统具有越来越多的主动/半主动控制元件。在主动底盘系统中,悬架使用车载控制系统控制车轮相对于车身的垂向运动,这与被动悬架不同,后者的运动完全由路面和固定的悬架参数决定。半主动悬架系统是折中的情况,可以通过实时控制从系统中去除能量。(半)主动控制车辆系统的CAE方法必须包含控制器和物理系统的联合仿真。由于计算出的道路载荷受控制系统的影响,因此联合仿真对于准确获取载荷十分重要。本研究中模拟的车辆系统包含半主动减振器。相关的控制方案如图1所示。在模拟控制系统中,输入的是车辆参数,例如加速度、悬架高度、速度等,输出为电流。然后将此电流反馈到Adams的减振器UDE,与阻尼器速度一起计算阻尼力。沃尔沃利用高度自动化的流程来进行仿真作业。基于Excel的设置用于准备仿真作业、在远程集群上执行并对结果进行后处理。过程涉及一个基于Excel的界面,用于Adams的批量处理。这个脚本化的批量处理过程用于运行多个不同事件和联合仿真。在Adams中,存在几种连接软件的方法,Adams支持FMI标准,能够导入导出FMU并进行联合仿真。此外,Adams支持使用植入文件在FMI框架之外进行联合仿真。Adans与Matlab联合仿真过程中,可以将Adams作为植入模型,这种方法需要Adams Control模块,生成.m文件和.acf文件。求解器通过存储通道或TCP/IP接收并执行命令,来运行仿真并传达车辆状态。此工作流程存在一些限制,即使是开放标准(例如FMI)也无法解决。无法指定导出模型的目标机器,因为文件生成时不知道计算节点。此外,由于知识产权问题,控制系统的开发并不能完全提供给沃尔沃,因此无法将其编译为FMU。而且,为32位车辆操作系统开发的软件,在64位系统上进行仿真时,会产生平台兼容性问题。即使所有这些问题在联合仿真的过程中都可以解决,但对于文件传输和设置是人工的。Simulink的并行运行及保持端口的追踪是很困难的。同样,每个分析都必须从Simulink内部手动启动,并将Adams作为联合仿真的过程中的从软件。为了解决这些问题,由MSC Software Services开发了一种新型的无缝方法并在沃尔沃汽车公司安装使用(图2),这种方法与先前描述的执行框架一致。用户可以自动生成Adams Car模型文件并自定义输出。脚本化的工作流程将与Simulink服务器建立TCP / IP连接,并启动Adams Car 控制求解器。通过TCP / IP连接,Adams / Car求解器与运行Simulink模型的计算机通信。整个过程是,启动Simulink服务器,像往常一样生成Adams求解器文件,在本地或集群上提交联合仿真作业命令。图2 : 改进的Adams-Simulink联合仿真过程
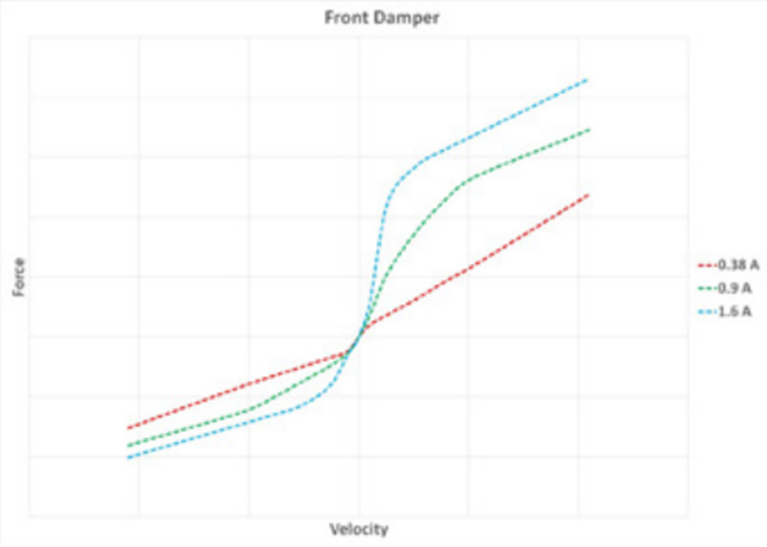
这个命令启动Adams守护进程,并与Simulink服务器进行通信来交换信息和文件,从而依次启动仿真,在此期间,Adams Controls将与守护进程联系并开始实际的联合仿真。对比联合仿真方法与最简单的无控制集成的方法。被动仿真在三种不同的阻尼/电流水平下进行(图3)。试图通过使用代表每个电流水平的阻尼器来研究半主动阻尼器对道路载荷的影响。阻尼器曲线代表最软到最硬的设置(最低到最高电流)。对于每种驾驶模式(舒适、动态、越野),每个电流水平各执行60个事件集。这会导致额外的后期处理,并在解释结果时增加复杂性。评估通道及其指标的峰值、损伤或等效力。对于不同的通道,不同的阻尼器设置是“最坏的情况”。根据结果,必须进行工程判断,确定将哪个阻尼器设置用作官方数据。如果选择错了,则存在零部件设计过度的风险。通过联合仿真的主动控制与采用静态电流/阻尼的被动控制的对比结果如下面所示。对于potholes仿真,与半主动仿真(图4)相比,低电流被动阻尼器(图6)在topmount force的最大载荷有显着差异。除此之外,在被动仿真中还可以看到缺乏回弹阻尼且缓冲块介入较大(图5和图6)。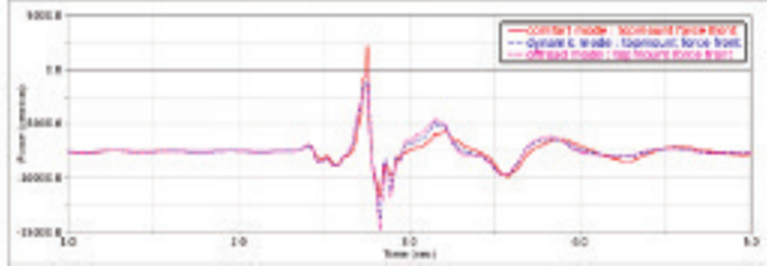
图4 : Pothole simulation, Front topmount force for each drivemode
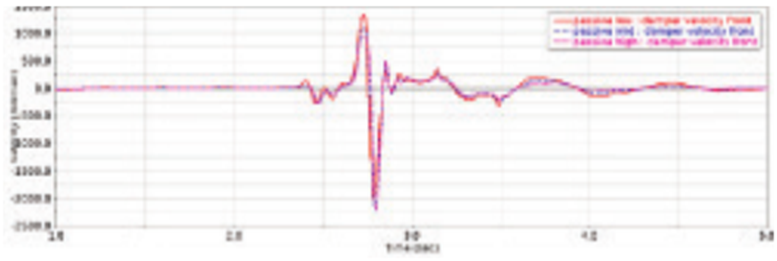
图5 : Pothole simulation, damper velocity.Passive equivalents with low, mid and high current representation
图6 : Pothole simulation, topmount force.Passive equivalents with low, mid and high current representation对于drop and rebound仿真,注意三种模式的最大电流(图7)。将半主动仿真的被动仿真的topmount force作比较。由于控制器提供的最大电流与驱动模式无关,因此在某些驱动情况下采用被动低电流和中电流的替代方案是不现实的。图7 : Drop off rebound simulation,Front damper current signal for each drivemode.
总而言之,沃尔沃汽车公司选择使用开发流程减少了人工操作、比较和工程判断的量。与MSC Software的服务组织合作,正在开发支持更复杂联合仿真场景的流程,其中也涉及仿真链中的其他工具。
深圳市优飞迪科技有限公司成立于2010年,是一家专注于产品开发平台解决方案与物联网技术开发的国家级高新技术企业。
十多年来,优飞迪科技在数字孪生、工业软件尤其仿真技术、物联网技术开发等领域积累了丰富的经验,并在这些领域拥有数十项独立自主的知识产权。同时,优飞迪科技也与国际和国内的主要头部工业软件厂商建立了战略合作关系,能够为客户提供完整的产品开发平台解决方案。
优飞迪科技技术团队实力雄厚,主要成员均来自于国内外顶尖学府、并在相关领域有丰富的工作经验,能为客户提供“全心U+端到端服务”。