专栏 l 流体仿真在开放式无人机3D打印领域的应用

微软的现任CEO萨提亚在他的《刷新》一书中提到,人工智能对人类的意义在于,我们不应将人工智能视为“人工的”东西,而是应该把它看成是用来增强人类能力的智能。
其实这个逻辑用在很多场景中有着异曲同工的呼应感,不仅仅是人工智能是用来增强人类能力的,在设计中,仿真软件也在发挥着增强人类驾驭复杂情景的能力,帮助人类实现一些令人“脑洞大开”的创新。
要论3D打印技术中的“脑洞大开”,开放式3D打印(OAM)让人过目不忘,其核心思想是打印系统的体积不受构建物体体积大小的限制,执行构建的“打印头”不受空间位置限制,同时保持极高的打印精度,实现大尺寸构建的3D打印直接成型。德迪创造性地将无人机作为打印喷头的载体,配备持续性的供料系统,适用于大型建筑、太空设备、海底建筑等场景。
开放式3D打印可以将民用无人机与3D打印技术进行完美融合,采用全新设计的3D打印专用无人机作为喷头载体,完美解决常规3D打印设备尺寸的限制。开放式 3D打印理论上不受打印地点、高度、成型尺寸等限制,具有高度的尺寸自由和设计自由性能。
开放式3D打印技术带来了打印尺寸和空间维度上的自由度,也具有相当高的设计难度和实现难度,其中不但涉及3D打印技术的难点,也涉及了一般飞行器涉及的全部技术难点,例如气动性性能、结构力学性能、稳定性性能等等。其中,气动性能在设计过程中主要依靠仿真流体力学来实现,本期谷.专栏通过安世亚太的《流体仿真在开放式无人机3D打印领域的应用》针对某一型号的3D打印无人机机型的流体仿真部分进行简要的说明。
虽然我们还并不清楚无人机3D打印的商业前景与潜力,但是通过开放式3D打印中流体仿真的学问,我们可以感受到仿真是如何来增强设计能力的。

在一般的开放式打印中,流体仿真能够解决的问题很多,主要与打印工作时使用的原料及工作环境相关。
本文中我们关注的无人机3D打印主要以混凝土等半流质的材料为原料,在3D打印工作中, 充满了各种挑战,譬如说材料从打印头挤出后质地比较软,不能马上凝固,且外形容易受到外界强气流的影响而发生变形。而由于在螺旋桨正下方区域,高流速区域的覆盖范围很高,需要考虑较高的风速对已经打印好的模型部分产生较大作用力的问题。
这些复杂的挑战依靠人的试错经验来解决是昂贵且很难以实现的,这时候流体仿真就发挥了重要的作用。
![]()
![]()
本文作者通过某一型号的涵道无人机模型,仿真分析其在开放空间中飞行时的流场,分析打印喷头附近的风速分布情况。针对当前选用的螺旋桨在不同转速下的升力范围,研究有无起落架对螺旋桨升力及打印喷头附近风速分布的影响。
针对本3D打印无人机机型,流体仿真主要关心以下几个问题:
- 原旋翼加上现有涵道设计后不同转速时侧向力的变化;
- 研究规定螺旋桨尺寸,不同转速时无人机的升力范围;
- 现有的两个旋翼在一个涵道中的设计,在同一涵道中的两个旋翼在工作时是否会相互干涉。
现有的无人机模型如图1所示,包含六个旋翼、保护罩、机臂,以及起落架、支架、平台、打印喷头等装置。

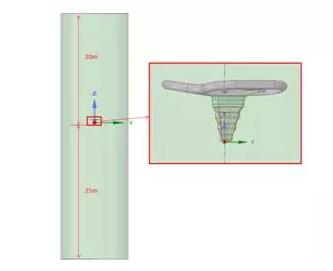
仿真分析无人机在开放空间飞行时的流场,需要选取足够大的空间作为流体计算域(如图2所示),以消除计算域边界的存在对无人机流场的影响。考虑到无人机在飞行时,旋翼驱动产生的流动方向主要是上下方向的,因此选用圆柱形的计算域空间,其半径为10m,高度方向为45m。

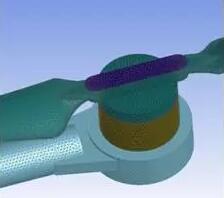
本次计算使用四面体加棱柱层划分网格,在螺旋桨叶片等细小结构附近采用0.1到1mm的小尺寸捕捉曲率变化和接近率, 在螺旋桨叶片附近使用5层棱柱层网格以保证高速旋转时的流场计算精度。
![]()
![]()
螺旋桨叶片使用MRF方法模拟其旋转,计算转速为4000RPM时的工况。
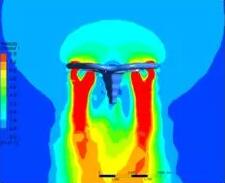
图5:4000RPM XZ截面速度云图,来源安世亚太

图6:4000RPM YZ截面速度云图,来源安世亚太
图5和图6分别为,该转速下XZ和YZ截面的速度云图,从图中可以看出,相同飞行状态下的无人机不同截面的气流场分布有较大的不同,这是由于无人机框架为轴对称而非中心对称所引起的现象。
在无人机的框架作用下,旋翼上方的气流较为集中,为旋翼上方的气流被卷吸进入桨盘区域,并不像其他无人机机型没有框架束缚,气流来自周围和上方。且在桨盘下方区域,此形式无人机的气流没有其他非涵道式无人机形式的发散现象。
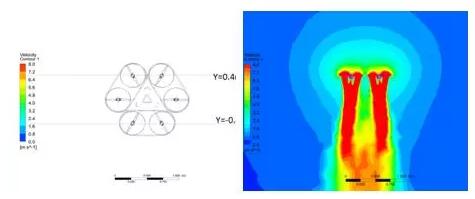
图7:无人机涵道与旋翼干涉性分析截图位置,来源安世亚太
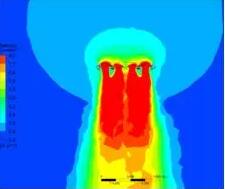
图8:工况1 Y=-0.4m处XZ截面速度云图,来源安世亚太

图9:工况1 Y=0.4m处XZ截面速度云图,来源安世亚太
图8中Y=-0.4m处为两个旋翼在同一涵道中的状态,图9中Y=0.4m处为两个旋翼分别在一涵道中的状态。从以上两图对比可知,桨盘之间的干涉主要位于桨盘之下的区域。右图中两桨盘之间下部有一明显的低速区,而左图中两桨盘之间下部没有低速区的存在。这是由于桨盘之间若没有涵道壁面的阻碍,也会有气流被卷吸进涵道中,两边桨叶下的气流随着流动融合在一起,说明两个旋翼在一个涵道中气流会有相互扰动的现象。
由于此无人机框架为轴对称而非中心对称,所以会产生力的不均衡分布,这种效应在飞行时会产生侧向力,可能会导致偏航,影响飞行时的稳定性。根据仿真的统计结果,对于此型无人机来说,不同转速下X和Y向的侧向力各有不同,这说明当转速发生变化时侧向力也在变化。虽然数值较小,但对于飞行状态的无人机来说,这会导致机体的不稳定,对控制和操纵都造成困难。
综上所述,流体仿真的应用可以避免在开放式打印的设计中出现不必要的资源浪费问题,起到到简化设计思路、缩短设计周期、提高设计效率的作用。
![]()
李菁
安世亚太流体咨询专家,航天工程专业,硕士学位,4年数值仿真经验,涉及高超声速、多相流、颗粒物、燃烧、传热分析等多个领域,目前主要参与多个增材设备流体仿真分析项目,积累了大量3D打印设备流体优化经验。


