『解读』TEASER | 快速且可证明的点云配准算法和代码解读

来源深蓝学院:深蓝前沿教育
本文是对文章《TEASER:Fast and Certifiable Point Cloud Registration》的解读。
摘要
主要贡献
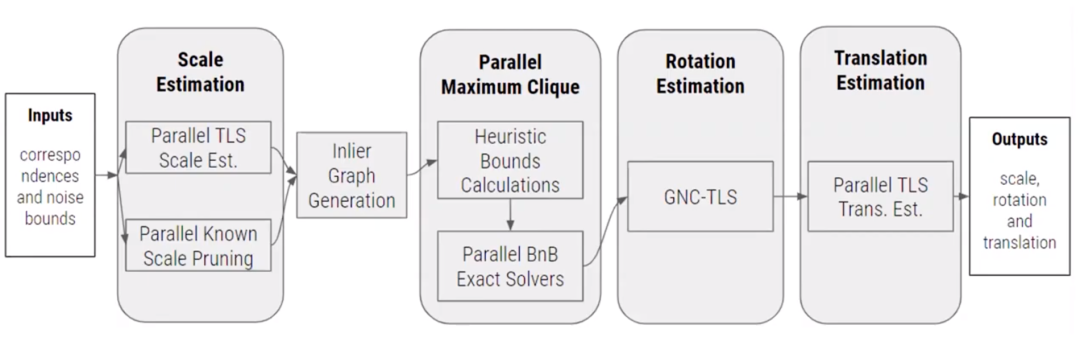
算法流程
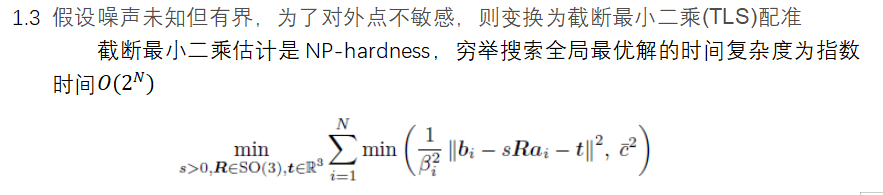
1.使用截断最小二乘代价函数的鲁棒配准


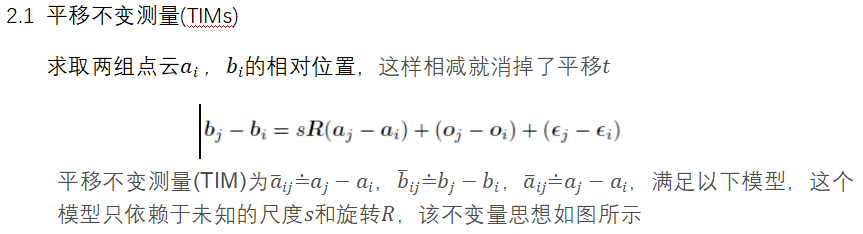
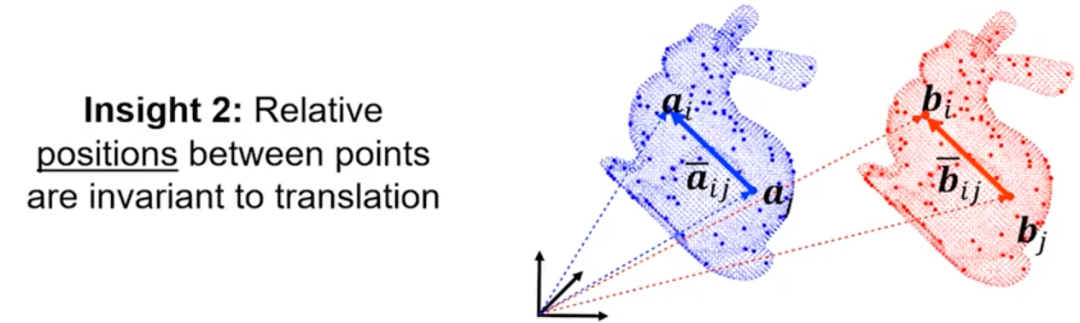
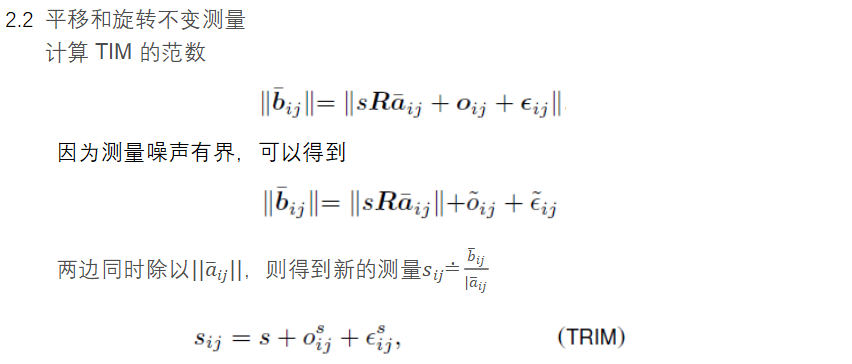
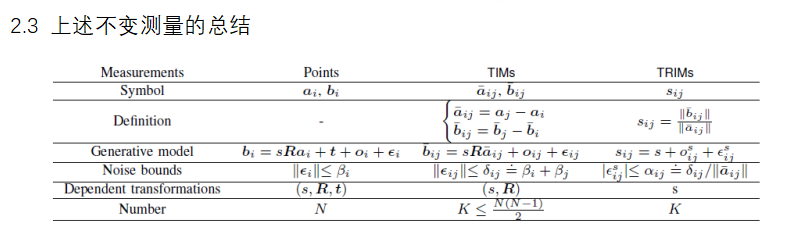
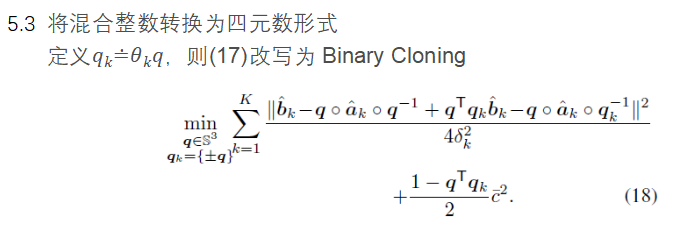
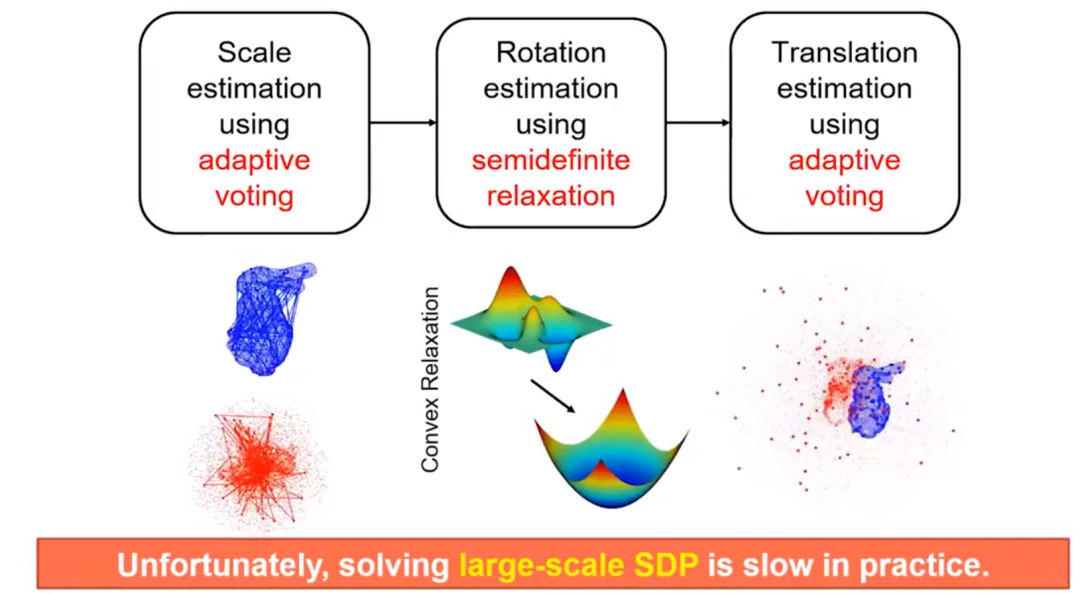
2.解耦尺度,旋转和平移估计

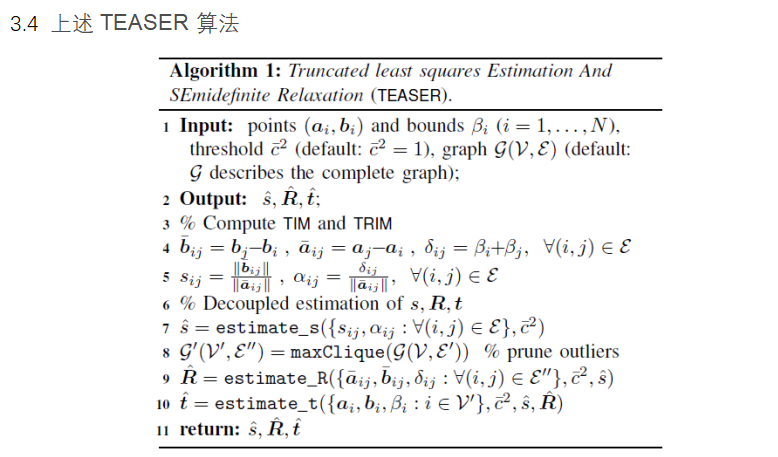
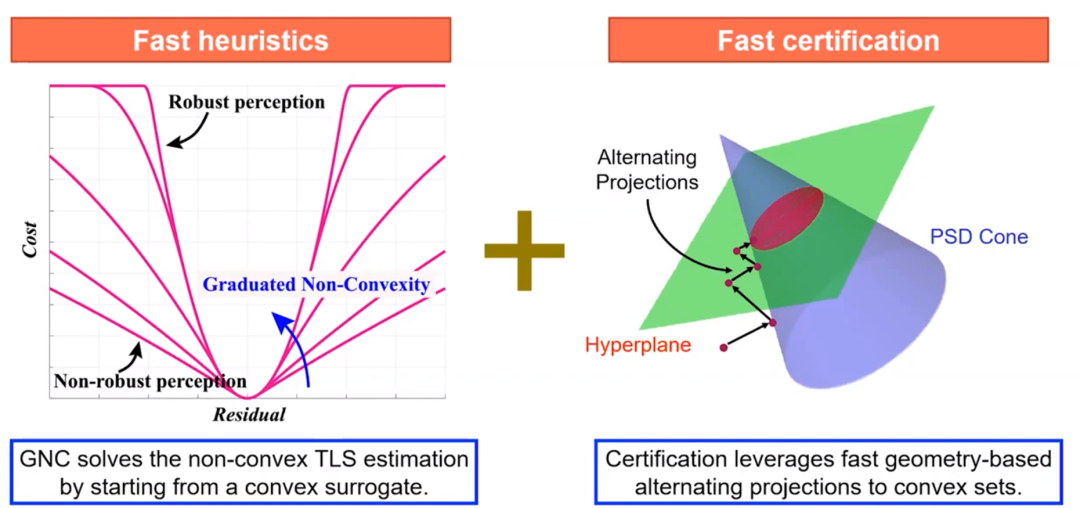
3.截断最小二乘估计和半定松弛(TEASER)
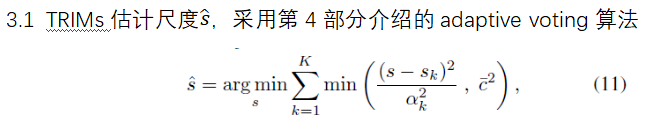


4.鲁棒的尺度和平移估计:Adaptive voting




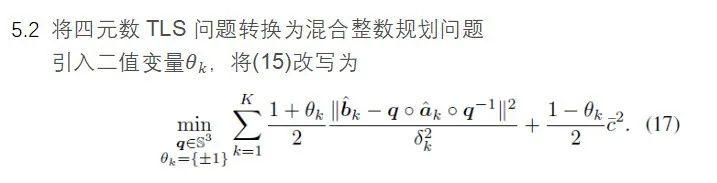
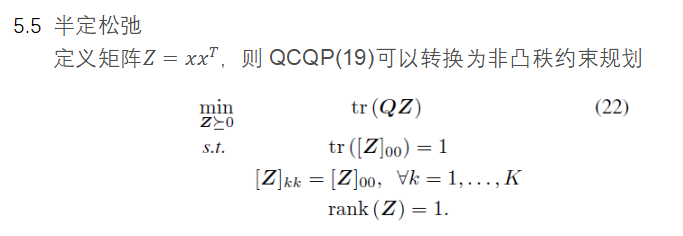
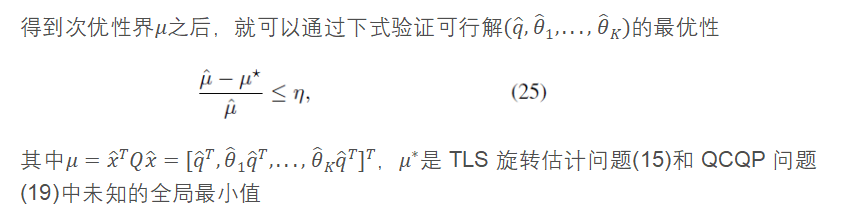
5.鲁棒的旋转估计:半定松弛和快速证实




6.TEASER和TEASER++求解尺度、旋转和平移三个子问题的对比

主要实验结果
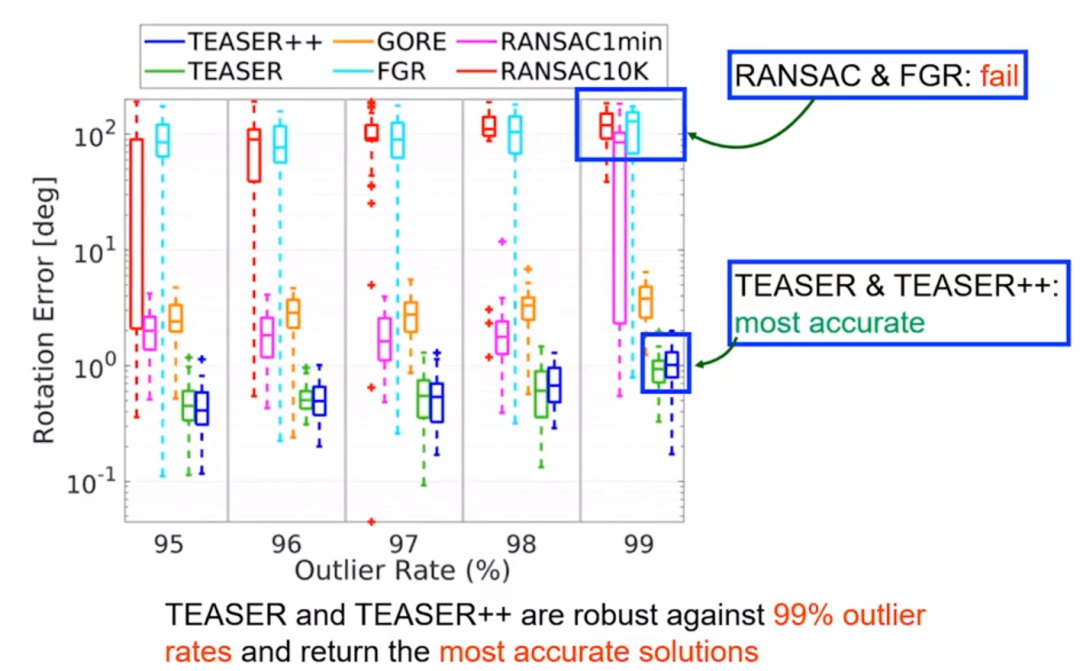
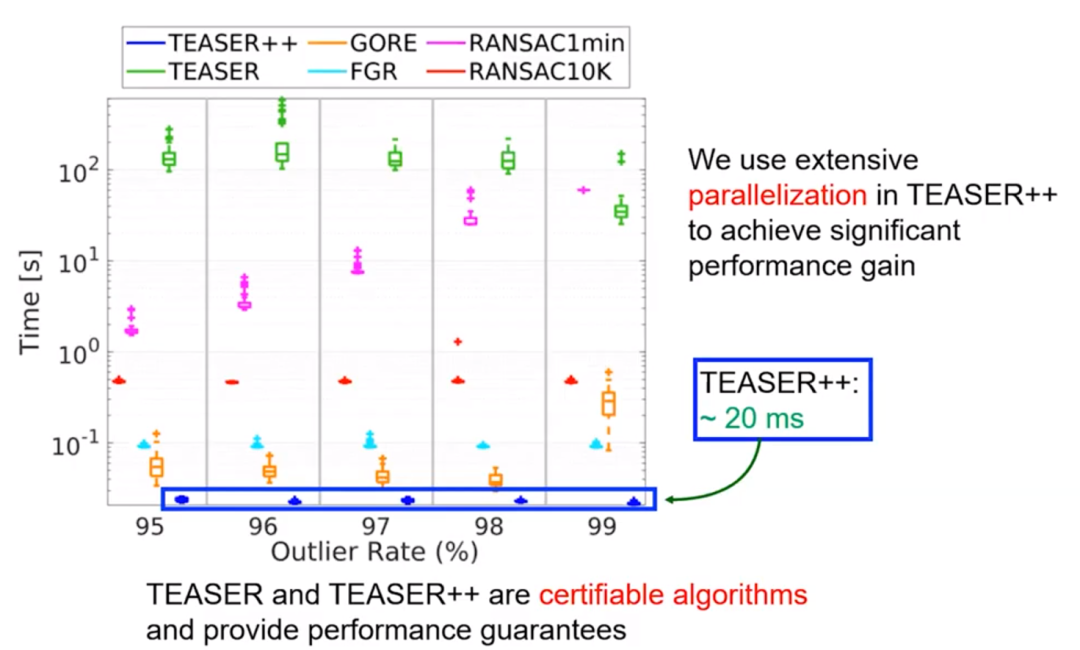
1.标准benchmarks测试
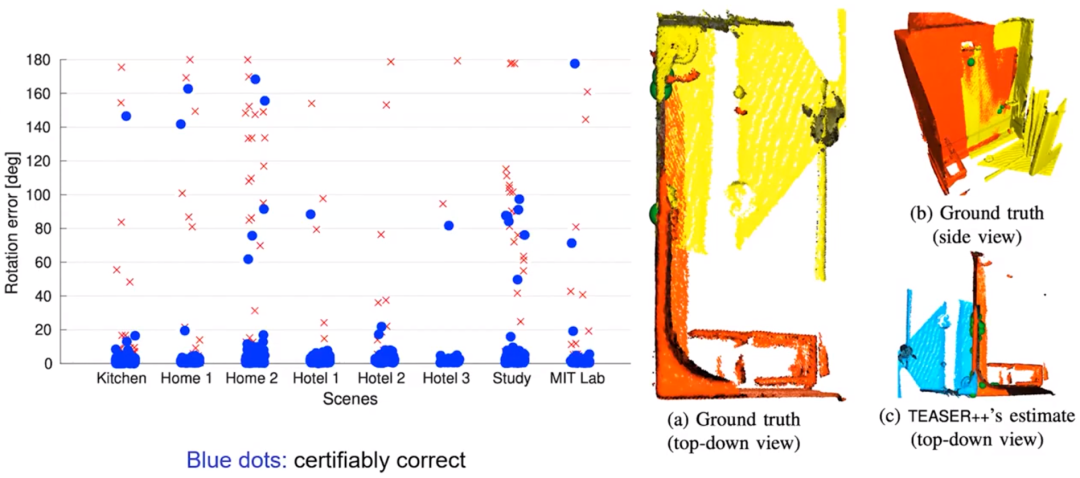
2.应用1:目标位姿估计和定位

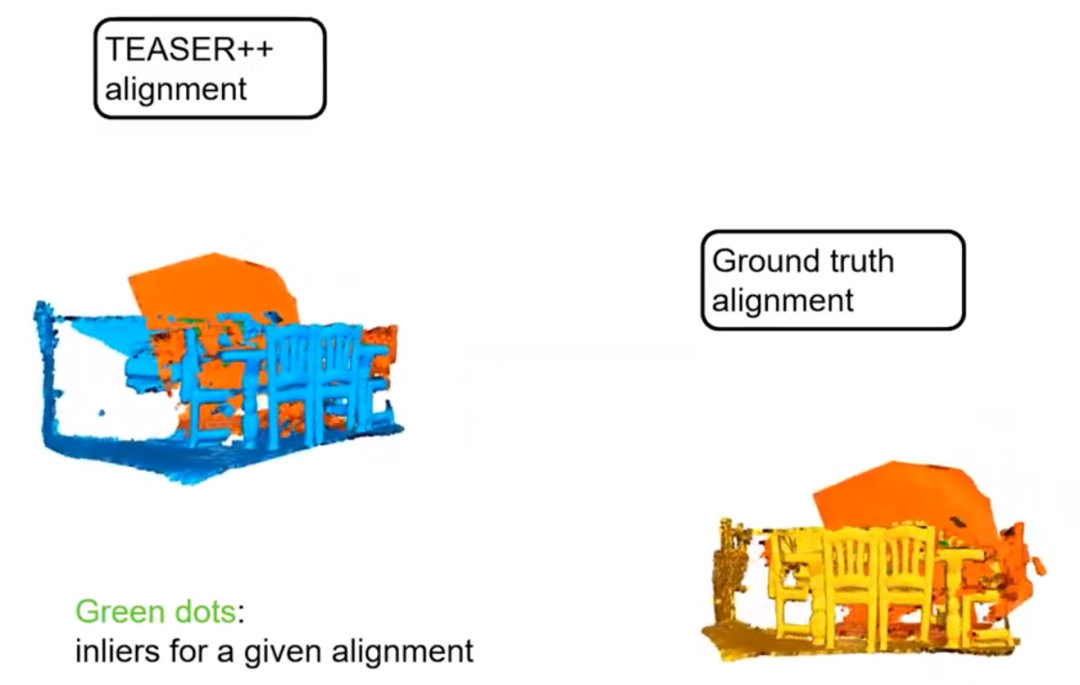
3.应用2:扫描匹配
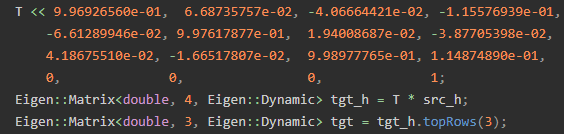
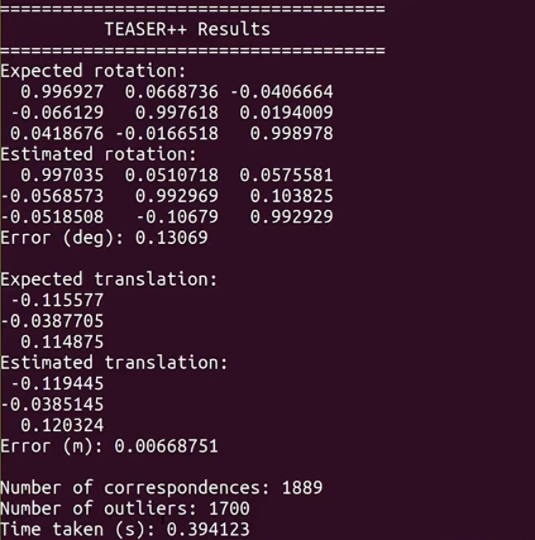
TEASER++代码解读与运行




 为1,是否估计尺度参数(estimate_scaling)默认为不估计false(如需要估计则设为true);
为1,是否估计尺度参数(estimate_scaling)默认为不估计false(如需要估计则设为true); ,相关内容可以参考作者RAL2020 “Graduated Non-Convexity for Robust Spatial Perception: From Non-Minimal Solvers to Global Outlier Rejection”的 Remark 5)
,相关内容可以参考作者RAL2020 “Graduated Non-Convexity for Robust Spatial Perception: From Non-Minimal Solvers to Global Outlier Rejection”的 Remark 5)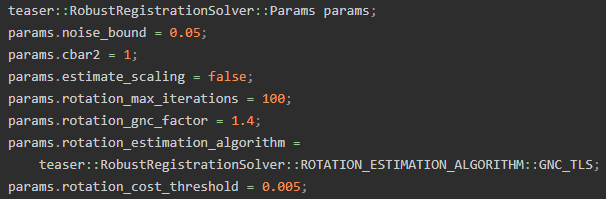

总结
登录后免费查看全文
附件
免费附件.txt
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2022-12-09
最近编辑:1年前

签名征集中

相关推荐
最新文章
热门文章
