⽬标⾏动及稠密环境未知情况下,⽆⼈机跟踪的系统解决⽅案

来源:深蓝学院-深蓝前沿教育
本文是对《Fast-Tracker:A Robust Aerial System for Tracking Agile Target in Cluttered Environments》的⽂献解读。(文末附原文章链接)
Author: Zhichao Han*, Ruibin Zhang*, Neng Pan*, Chao Xu, and Fei Gao
Editer: 柯⻄
摘要
摘要
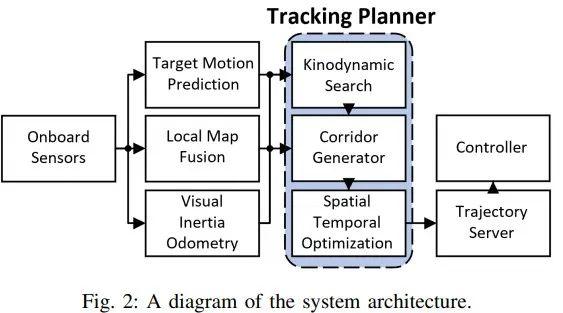
⽬标轨迹预测:利⽤观测到的⽬标历史信息,在考虑⽬标动态约束的情况下预测未来轨迹; 跟踪轨迹规划:传统规划结构,前端采⽤考虑运动学的搜索⽅法,后端采⽤时空优化和⽆碰撞的轨迹优化⽅法。
内容及贡献
内容及贡献
在⽆⼈机跟踪领域,⾸先要在有限传感器条件下识别⽬标和周围障碍物,然后规划出可⾏的安全轨迹。此外,为了处理意外情况,需要⾼频率的重规划过程。我们提出⼀个⽬标意图未知,周围环境未知的⽆⼈机跟踪系统框架。
目标轨迹预测及重定位
将⽬标近似为刚体,假设⽬标运动速度和加速度有界且连续,对于观测过的历史轨迹使⽤polynomial regression,然后⽤Bernstein basis polynomial进⾏动态约束,⽣成的轨迹作为⽬标未来运动预测。此外,针对障碍物遮挡,传感器范围限制,⽬标运动未知时,⽆⼈机难以定位⽬标的情况,我们设计了⽬标重定位策略。
跟踪轨迹生成
论文贡献
将上述⽅法集成到⽆⼈机系统上,采⽤多个相机提升传感器性能,在真实环境中实验,并与其他⽅法相⽐,更有优势,该⽂贡献如下:
轻量级且⽬标运动未知的基于⻉塞尔多⾯体约束的运动预测⽅法; 前端:⼀个考虑⽬标的运动学搜索⽅法;后端:时空轨迹优化⽅法; 结合传感器,形成系统解决⽅案,并进⾏评估。
目标运动检测
带约束的贝塞尔预测轨迹
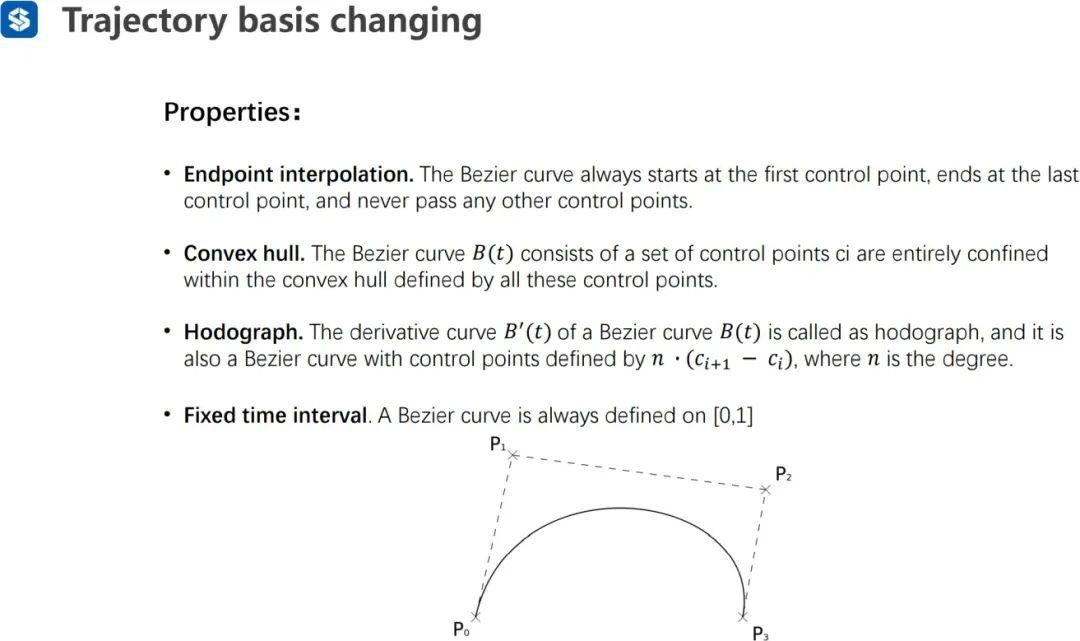
采⽤⻉赛尔曲线描述⽬标预测轨迹,n阶⻉塞尔曲线性质如下:
该⽅法将观测到的世界坐标系下的⽬标位置及时间戳存⼊⻓度为L的FIFO队列中。其中,历史时间范围是
 ,等于当前时刻。当获取到新的⽬标观测,调整历史观测⽣成新的⽬标预测轨迹
,等于当前时刻。当获取到新的⽬标观测,调整历史观测⽣成新的⽬标预测轨迹  。预测的时间范围是
。预测的时间范围是
 ,如图3。
,如图3。
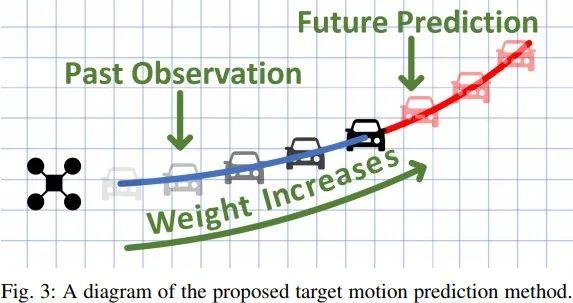
历史观测的可信度随时间递减,因此,观测到的时间越靠前,在损失函数中权重越低。添加权重 判断不同时间戳观测的置信度。采⽤双曲切线tanh(x)计算权重:

函数值随  值的增加快速衰减,可以有效判断不同观测的有效性。整体损失函数包括两部分:
值的增加快速衰减,可以有效判断不同观测的有效性。整体损失函数包括两部分:

1.使⽬标轨迹和观测距离差最小;
为了保证⽬标预测轨迹的动态可⾏性,预测速度和加速度约束为 ],
], ]。根据⻉塞尔曲线的凸包属性和hodograph属性(详⻅运动规划课程第六节),运动学约束如下:
]。根据⻉塞尔曲线的凸包属性和hodograph属性(详⻅运动规划课程第六节),运动学约束如下:

n是⻉塞尔曲线阶次, st是时间尺度。⻉塞尔曲线的⼆范数正定,所以该问题是带约束的QP问题。
目标重定位
 ,然后离散最后预测轨迹。如果预测轨迹上有障碍,采⽤路径搜索算法⽣成⽆障碍路径
,然后离散最后预测轨迹。如果预测轨迹上有障碍,采⽤路径搜索算法⽣成⽆障碍路径  ·
· .和
.和  构成重定位路径Pr;
构成重定位路径Pr;4. 在重定位步骤中,如果在重定位轨迹上有新的障碍,则重新⽣成新的轨迹。

安全轨迹生成
安全轨迹生成
目标导向的运动学跟踪路径搜索
运动学搜索⽅法基于hybrid A*算法,主要包括邻节点拓展和启发式函数设计两部分:
邻节点拓展:


·拓展邻节点的时间序列为

 是上⼀帧状态向量,给出
是上⼀帧状态向量,给出  可以得到基于运动学的拓展节点。每次拓展步骤可以⽣成
可以得到基于运动学的拓展节点。每次拓展步骤可以⽣成  个拓展节点。
个拓展节点。启发式损失函数:

1. 距离损失函数
· :⽆⼈机当前状态Xc到⽬标状态Xg的距离。
:⽆⼈机当前状态Xc到⽬标状态Xg的距离。
·⽬标状态Xg :由跟踪⽬标的当前状态Xtc和预测 时刻后状态
时刻后状态 的中间量得到。
的中间量得到。
 :由预测轨迹
:由预测轨迹  得到,速度量是
得到,速度量是  的⼀阶导数,
的⼀阶导数,  其中
其中  采⽤Xc到Xg的OBVP距离,转化为两点边界值问题(OBVP),⽤于求解最⼩化动态损失函数的最优路径。
采⽤Xc到Xg的OBVP距离,转化为两点边界值问题(OBVP),⽤于求解最⼩化动态损失函数的最优路径。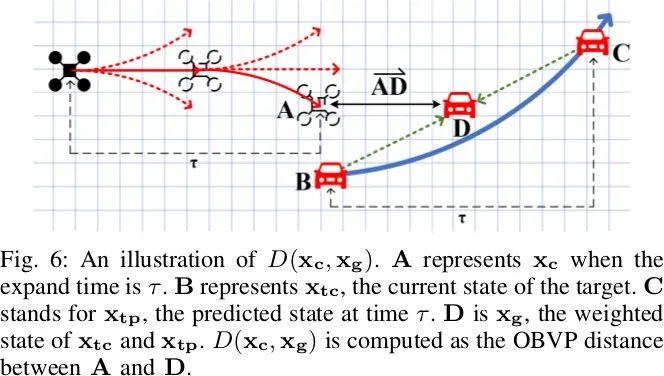

 是时间惩罚函数,
是时间惩罚函数,  是期望拓展时间的和,是权重,该项能够加速搜索,因为它倾于选择当前节点的相邻区域,⽽⾮整个状态空间。
是期望拓展时间的和,是权重,该项能够加速搜索,因为它倾于选择当前节点的相邻区域,⽽⾮整个状态空间。时空优化轨迹生成
 。
。
Results/实验结果
Results/实验结果
应用详情
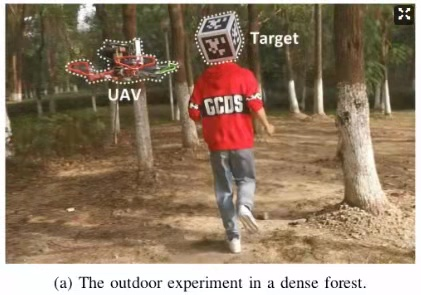
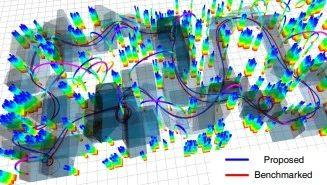
四旋翼硬件平台同论⽂"Teach-repeat-replan",⽬标是头戴⼆维码移动的⼈.⽤三个有限视场⻆的相机检测⽬标.因为视场⻆较宽,⽆需使四旋翼⾯向⽬标,⽽是朝向轨迹切线⽅向,以保证能够观测到轨迹⽅向的障碍。
系统总运⾏时间接近20ms,设置整个系统重规划频率为15HZ。
实验详情