SpaceClaim参数化建模的三种方法 | 小技巧

本文摘要(由AI生成):
本文介绍了SpaceClaim的三种参数化建模方法,包括基于拉动与移动工具的几何参数化、基于标注平面的尺寸参数化和基于SpaceClaim脚本的参数化建模。这些方法可以帮助仿真工程师在不改变直接建模大前提的情况下,实现参数化的技术和应用。
张杨
从2015年ANSYS 收购SpaceClaim开始,这一款颠覆性的直接建模工具就逐渐成为了仿真界前处理的宠儿,不管是流体、结构、电磁,热或多物理场,还是ANSYS、西门子、达索、澳汰尔,都已经越来越多的在各自的仿真过程中出现SpaceClaim的身影。
然而,SpaceClaim作为一款无特征直接建模工具,在参数化模型构建的过程中,实际上是存在较大劣势的。尤其是对比传统的CAD设计工具,基于模型树的建模方法显然更适合构建参数化三维实体。不过,随着SpaceClaim软件的不断发展和完善,在不改变直接建模大前提的情况下,参数化的技术和应用也已经逐渐的开始走进仿真工程师的视野。

图1 某平台的热销课程,SpaceClaim与西门子仿真工具紧密配合
本文就抛砖引玉,简要介绍一下常见的三种SpaceClaim参数化方法。
基于拉动与移动工具的几何参数化
SpaceClaim软件中的拉动与移动工具,通常在三维模型的处理过程中扮演着修改模型的角色。立足于已有的三维CAD模型进行尺寸和位置的变更,也常用于圆弧、孔、倒角等尺寸修改的情况。第一种参数化建模的方法就由此而来,在给定的运动边界和基准共同约束下,修改的尺寸即可作为参数作用到最后模型的更改过程之中。

图2 SpaceClaim的群组面板包含参数化和边界命名两种功能
然而,对于大部分着眼于多工况仿真计算的参数化模型而言,很多时候其中的几何参数化要求较低,普遍不需要更改拓扑结构,也不存在装配问题,因此,SpaceClaim的参数化功能在这些情况下,还是有较多的应用场景。

图3 直接修改驱动尺寸即可改变几何模型
当然,基于拉动与移动工具进行参数化模型构建的方法还是相对简单的,只需要在群组中构建对应的驱动尺寸即可完成参数化设置。同时,构建完毕的几何参数还可以被Workbench平台进行读取,从而用于后续的网格划分、求解计算、后处理等环节,也支持进一步的仿真优化技术。
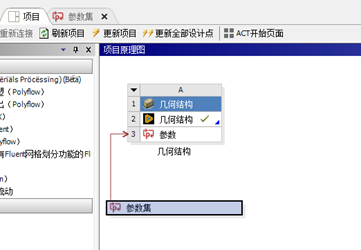

图4 SpaceClaim的参数化可以直接与Workbench平台连接
基于标注平面的尺寸参数化
SpaceClaim软件支持快速标注功能,能够对已有的模型在给定的平面上进行快速的尺寸标记,包括长度、角度、半径、距离等。

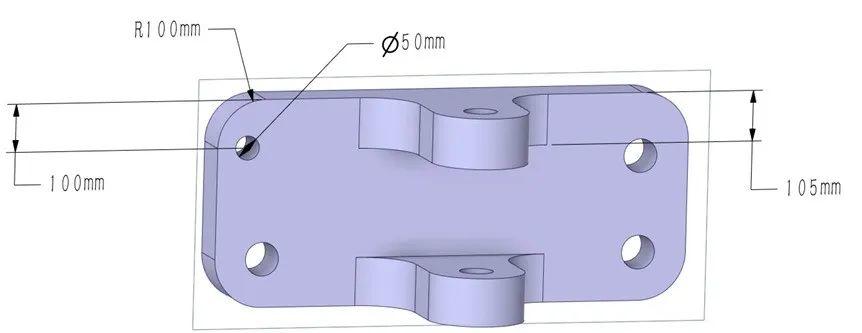
图5 基于标注平面的尺寸标定
当采用该方法进行参数化建模时,只需要对相应的尺寸进行更改即可完成模型参数的修改,在标注平面内,尺寸前面的爆炸图标决定了该尺寸能否被修改。

图6 包含爆炸符号的尺寸支持参数化
该方法适合于小规模的参数化仿真工作,尤其适合于包含转角的参数化定义,值得一提的是,由于该方法不需要创建组来表征对应的参数,因此也无法和后续的其他工具进行连接。

图7 参数修改于几何实时更新
基于SpaceClaim脚本的参数化建模
这一项技术被认为是建模界具有划时代意义的革新,让很多参数化建模和CFD二次开发无法完成的工作都能够得以有效实现。大家应该了解到,流体仿真的二次开发在传统工作流程中并不被看好,其主要的原因就是三维CAD模型的前处理过于个性化,不同的模型需要进行的前处理工作都不尽相同,这也导致了二次开发模板无法有效形成统一的自动化流程。

图8 SpaceClaim脚本的录制技术
然而,SpaceClaim脚本技术的出现颠覆了这一观念,对于大部分的模型我们都可以通过“导入+重建”的方式来规避那些需要前处理阶段完成的个性化工作,从而有效的统一了不同模型的可能存在的问题,从而保证了二次开发模板的高度自动化。

图9 基于脚本的SpaceClaim自动建模技术
几何模型参数化作为仿真二次开发工作的基础,是首先能够被SpaceClaim脚本技术所支持。对于任何的SpaceClaim模型构建及修改,软件都支持过程的录制技术,所有的软件操作会以Python的代码来进行记录,随后我们只需要对代码的默写数值进行修改,即可轻松完成参数化建模过程。该方法实际上保留了模型建立的过程,与传统结构树建模相比有类似的特点,但更加的灵活、稳定;同时,修改脚本代码的方法不需要基于已有的模型进行更改,也不受拓扑形状和装配关系的限制。适用的范围几乎可以包括所有的场景。
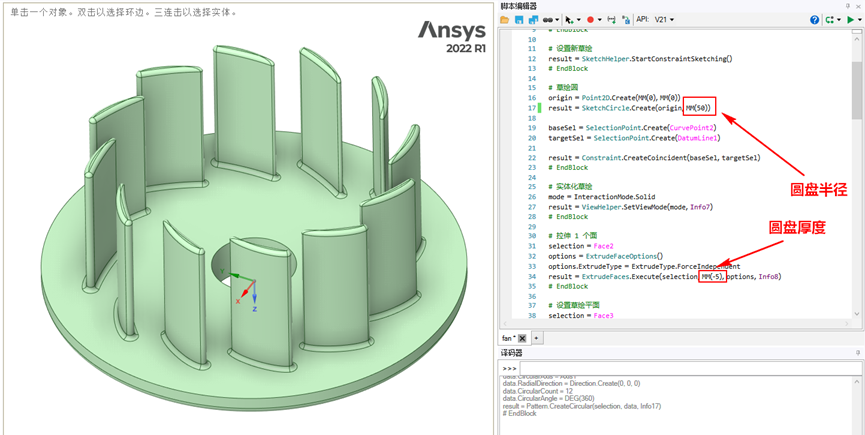
图10 修改对应位置的参数即可完成参数化建模
以上三种几何模型的参数化建模方法,你掌握了么?如果还想了解更多的参数化仿真内容,请关注大咖慧仿真课堂。



