MeshFree|擦窗机仿真分析
基于SolidWorks 及MeshFree 环境下的
新型擦窗机吊船伸展机构有限元分析
3 北京建铂瑞机电设备工程技术有限公司 北京 100080
摘 要:针对新型擦窗机吊船伸展机构的展开状态进行静力学分析,通过SolidWorks 对伸展机构进行三维建模,然后将三维模型导入Midas MeshFree 中进行有限元分析,得到不同载荷、不同工况下伸展机构结构的变形和应力情况,从而确定结构危险点并计算得出结构安全系数。Abstract: Static analysis is carried out on the extension state of the extension mechanism of the new window-cleaning machine crane. SolidWorks is used to carry out three-dimensional modeling of the extension mechanism, and finite element analysis is carried out by introducing the three-dimensional model into Midas MeshFree so as to obtain the deformation and stress situation of the extension mechanism under different loads and different working conditions and determine the danger point in structure and obtain the structural safety factor.Keywords: window-cleaning machine; extension mechanism; 3-D modeling; finite element analysis文章编号:1001-0785(2018)04-099-05 擦窗机的灵活性主要表现在主体设计与接近形式两方面。擦窗机的主体设计应在高层建筑设计时就予以考虑,国内擦窗机主体主要有轨道式、轮载式、悬挂式、插杆式、滑梯式等5 个系列[1]。常用的接近形式主要有新机型接近、在主机与吊船间增加伸展机构接近、改变吊船结构形式接近、悬挂轨道及幕墙销系统接近等。对于擦窗机的选用,已有专家学者进行了对比分析及介绍,如李维维对苏州建屋大厦的擦窗机进行分析选型[2];谢建琳对上海中心大厦擦窗机系统方案的介绍[3]等。擦窗机接近形式选用的主要依据是建筑物幕墙的主要形态,如普通建筑物可直接选用直上直下型的普通擦窗机。对于内凹深,且凹进部位与立面最高处距离不超过6m的建筑物可选用折臂式擦窗机[4]。 文中所述新型擦窗机吊船伸展机构通过在主机与吊船之间增加机械连杆机构,并用液压缸控制连杆机构展开,从而达到对不同凹进距离的幕墙清洁及维护的目的。虽然已有学者对该种伸展机构有所提及,但仅停留在对其工作参数的分析上,并未对机构的安全性进行静力学及有限元分析。 本文首先对该机构伸展状态进行静力学计算,后运用SolidWorks 三维软件对吊船伸展机构进行三维建模,并利用迈达斯公司的Midas MeshFree 软件进行有限元分析,计算得出结构的安全系数。 该吊船伸展机构模型主要包括伸展臂架、平衡臂、液压缸、配重等4 部分,机构伸展长度为3.5 m,完全展开时伸展臂架与平衡臂最大夹角为150°,液压缸行程为1.6m,配重由6个直径0.4m 重60kg 的圆盘对称分布于平衡臂末端。伸展机构结构如图1所示。根据以上数据,在SolidWorks 中对该伸展机构进行三维建模,其三维模型如图2 所示。
对伸展机构展开状态做静力学计算。将伸展机构简化为刚性结构,忽略重力影响,进行受力分析,受力简图如图3所示。其中伸展臂架OA长3.5 m,平衡臂BF长5 m,臂杆与平衡臂最大工作夹角150°,液压缸CE与平衡臂夹角18°,F1为篮体重量及施加的载荷,F2为配重360kg。由此,可依据整体受力情况列出平衡方程。 在该机构的静态分析中,应考虑不同工况对结果的影响。主要分析了额定载荷(Q)、动力试验载荷(1.25Q)、静力试验载荷(1.5Q)、偏载等4 种工况下的机构受力问题,其中额定载荷为250 kg。
以在额定载荷状态下正常工作的情况为例进行分析,其中F1 =4 kN,F=11.7kN。平衡臂受力如图4 所示,根据平衡臂受力列出力的平衡方程,即
平衡臂D处截面形式如图5所示,经查GB706-2008《热轧型钢》得D 点处截面为10 号槽钢,其截面系数W=39.7×10^6 m^3,故有 伸展臂架受力如图6所示,M 处截面形式如图7,其中,B=60mm,H=160mm,b=54 mm,h=154 mm。由此可以得出由于伸展臂架为2 根杆件组合而成,故每根杆在M处的弯矩为4.1kN∙m。由上述计算可以得到表1所示在额定载荷下工作时的机构危险截面处应力及安全系数。 由表1 可知,该伸展机构在额定载荷下工作时,安全系数n ≥ 1.5,故在该工况下伸展机构符合安全要求。依照上述分析,分别对在1.25 倍动力实验载(1.25Q)、静力试验载荷(1.5Q)及偏载等3 种工况下伸展机构的危险截面应力进行分析。由于配重及平衡臂尺寸不变,机构完全展开时平衡臂危险截面D 处应力变化不大,故不再对平衡不进行分析,对伸展臂杆的分析结果如表2 所示。由表2可知,最危险的工况为1.5 倍额定试验载荷(1.5Q),在该工况下工作的伸展机构最危险截面M处安全系数最小n=3.02 ≥ 1.5,由此判断,该吊船伸展机构满足GBT19154-2017《擦窗机》中对结构件安全系数的要求。Midas MeshFree 是MIDAS公司为机械行业推出的有限元分析软件。该软件可以模拟实际环境对模型施加约束和载荷,计算模型的应力、应变、位移等参数,实现静态、模态、疲劳、传热、热应力等。Midas MeshFree 是基于IBM(Implicit Boundary Method)方法开发的免网格划分新技术的分析软件,其采用固定网格,在不考虑CAD模型复杂性的情况下,将自动形成结构表面上的边界,并可在不需要网格划分的情况下快速获得分析结果。3.2 运用MeshFree 对吊船伸展机构进行分析 伸展机构主要材料为Q235和Q345,由于伸展臂架的臂杆为主要受力构件,故将其材料设定为Q345,屈服强度为345MPa,综合考虑经济等因素,将其余构件材料设定为Q235,屈服强度为235MPa。吊船伸展机构在空中完全展开时,主要受到额定载荷及篮体自重产生的力F1,伸展结构自重G,配重重量产生的力F2,以及吊点出钢丝绳给机构的力F,各工况下荷载大小见表3。 在进行结构分析时,首先分配和定义材料;其次添加约束条件,该伸展机构在工作时处于悬空状态,只有钢丝绳对其有约束作用,故在钢丝绳吊点出对机构进行约束;然后添加载荷,根据表3 分别在臂架前端及平衡臂末端施加相应荷载,并添加自重,加载后结果如图8。最后进行运行分析,分析的第一步是基于IBM方法完成有限元网格的计算,划分出固定网格,网格划分结果,如图9。软件完成自动运行分析后,自动显示云图,根据分析需要选择位移、应力、应变云图。图10为该伸展机构变形情况,图11为该机构应力分布情况。

由应力分布云图可以看出,该伸展机构危险截面出现在臂杆或平衡臂。在运行结果中选中臂杆,选择“只显示”,对臂杆的应力分布结果进行查看,结果见图12。同理,对平衡臂的应力分布情况进行查看,结果见图13。

假设在理想状态下工作,不考虑风载的影响,对该吊船伸展机构在额定载荷(Q)、动力试验载荷(1.25Q)、静力试验载荷(1.5Q),以及偏载等4种工况下伸展吊架进行有限元分析,分析结果如表4表5所示。 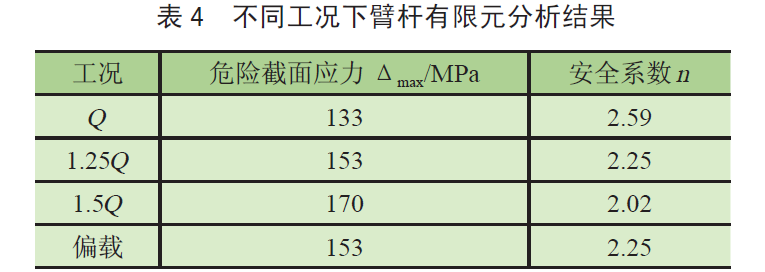
 由表4中数据可以看出,除偏载情况外,伸展臂架臂杆的应力随载荷的增大而增大,分别为133MPa、153MPa、170MPa,安全系数依次为2.59、2.25、2.02。由表5中数据可以看出,平衡臂虽为伸展机构主要杆件,但其应力随载荷变化较小,最大为119MPa,最小为103.7MPa,安全系数平均为2.2。伸展臂杆和平衡臂危险截面处的安全系数均满足GB/T19154-2017《擦窗机》中对结构件安全系数的要求,故该伸展机构的安全性满足需要。
由表4中数据可以看出,除偏载情况外,伸展臂架臂杆的应力随载荷的增大而增大,分别为133MPa、153MPa、170MPa,安全系数依次为2.59、2.25、2.02。由表5中数据可以看出,平衡臂虽为伸展机构主要杆件,但其应力随载荷变化较小,最大为119MPa,最小为103.7MPa,安全系数平均为2.2。伸展臂杆和平衡臂危险截面处的安全系数均满足GB/T19154-2017《擦窗机》中对结构件安全系数的要求,故该伸展机构的安全性满足需要。1)在额定载荷、动力试验载荷、静力试验载荷及偏载等4 种工况下对吊船伸展机构进行计算及有限元分析,伸展臂杆的应力随载荷的增大而增大,平衡臂应力随载荷变化较小,两种计算方法得出的危险截面处的安全系数均符合标准GB/T 19154—2017《擦窗机》中n ≥ 1.5 的规定。
2)不同工况下,伸展臂杆的计算结果,两者存在一定差异,原因可能与伸展机构模型简化及约束设置等相关。
3)平衡臂在额载工况下安全系数分别为1.87 和1.97,两种计算方法得出结论基本接近。
4)在不同工况下,两种计算方法得出的伸展结构安全系数均较大,故可对该伸展机构进行轻量化设计,减轻伸展机构重量,或增大伸展距离。
[1] 兰阳春,薛抱新. 擦窗机设计概述[J]. 建筑机械化,[2] 李维维,刘运辉. 凹立面外墙擦窗机方案比较[J]. 建筑机械化,[3] 谢建琳,蒯文龙. 上海中心大厦擦窗机系统[J]. 建筑机械化,[4] 宋丹,刘玉建. 擦窗机系统中几种接近形式及应用分析[J].建筑机械,2013(15):40,41.
来源:midas机械部落