
数据科学赋能电池安全

01 电池安全的本质:电芯热失控
随着动力电池安全法规的不断加码、电池安全性能成为主机厂和电池厂研发的重大技术课题之一。
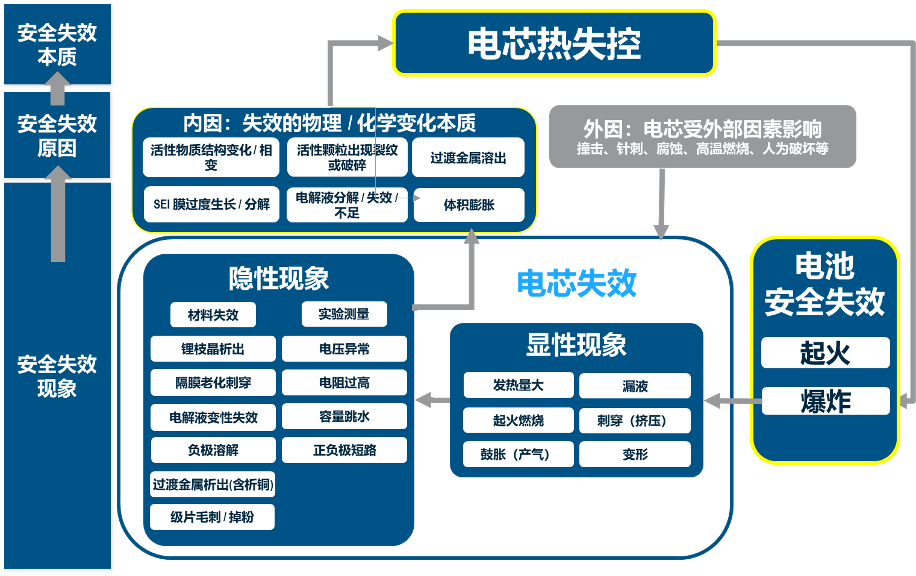
造成电池安全隐患的事故可分为外部破坏与内部物理化学反应,其中外部破坏指的是电池被撞击、挤压造成起火和爆炸。然而不管是外部破坏、还是内部物理化学反应,其本质都是电芯突破安全临界点后使电芯发生不可逆的热失控所致。
所以,造成电池安全的根本原因是电芯热失控
02 技术研究热点与难点:如何准确预测电芯热失控
企业对电池安全的热失控研究总体来说可归纳为以下5种:
热管理系统:电池热管理方案包括电池热电技术、电池风冷技术、电池连接系统;
热失控检测系统:通过系统监控电池组与电池状态,若达到预定热水平则预警;
热失控防止方法:热失控安全防控策略,喷淋灭火系统,防止热失控蔓延;
防止热失控新材料研发:新型隔热包覆材料,新型高闪点电解液,新型吸热材料;
热失控预测方法:利用数学模型预测电池处在滥用情况下的安全性能,及时预警可能发生的热失控。
其中,热失控预测是企业研究的热点和难点,也是最能提升产品质量与安全性的技术。
03 达索系统基于分子模拟和数据科学的电芯热失控预测方案
传统的电芯热失控预测方法,是通过建立热失控数学预测模型,预测热失控电芯化学反应,但局限性在于预测模型参数获取依赖于大量的实验数据,无法深入考虑微观反应机理的影响,模型欠缺全面性等问题。
达索系统解决方案基于分子建模,表达并模拟微观反应机理,联合热失控模型进行仿真,通过大量的数据进行学习和训练,更加全面的提高预测模型的准确度。
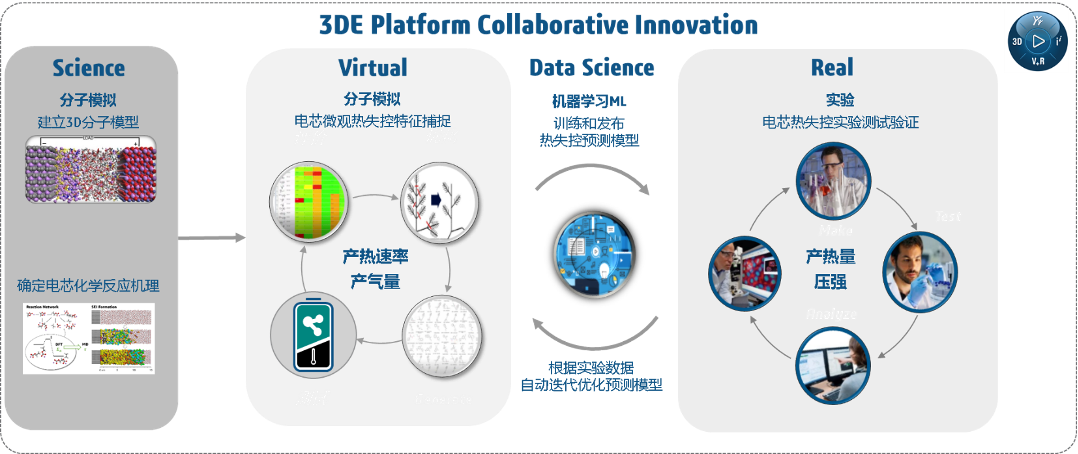
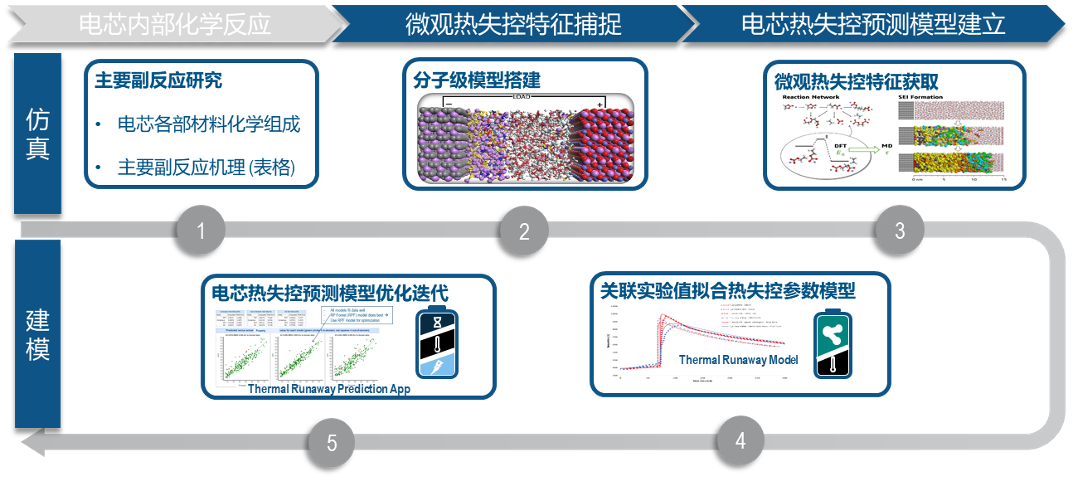
1.基于微观虚拟仿真理解热失控机理
分子级精度定义材料并搭建实验难以表征的微观电化学模型(如SEI,电极与电解液表界面所发生的反应)。
通过微观仿真确认电芯内部所发生的副反应类型,反应所产生气体的种类,反应所累积的热量。
2.有效减少实验量,降低研发费用,缩短研发周期
加入微观仿真测试,可减少不必要的实验次数以及响应的材料损耗。
3.降低预测模型搭建难度,提高模型适用性
利用机器学习算法快速关联宏观测试值与微观特征值的关系,拟合热失控预测模型参数。
基于微观模拟数据,更全面地考虑材料失效本征原因与宏观现象间的复杂耦合关联。

价值收益
提升模拟仿真技术的工程化应用能力
掌握从工程问题中提炼并解决锂电安全问题的能力
掌握利用分子模拟手段对电池安全相关性质进行表征和预测的基本能力
掌握利用数据科学手段建立以及优化迭代预测模型的能力
提升企业技术资产固化能力
掌握利用数据科学手段从历史数据中获得新见解的能力
解决工程问题的同时积累基于科学与数据的行业know-how
通过数学模型固化已有知识为产品迭代升级提供科学有效的指导
-END-



