LiToSim在显式动力分析中的应用

本文摘要(由AI生成):
本文介绍了LiToSim在显式动力分析中的应用,包括人头靠垫冲击分析和器件撞针冲击分析两个场景。同时,针对显式动力分析的特点,对算法、界面及相关特性进行了封装,形成了一款针对动态冲击仿真的专业化软件LiToDyna。
本文将结合人头靠垫冲击分析与器件撞针冲击分析两个场景,对LiToSim在显式动力分析中的应用进行介绍。同时,针对显式动力学分析的特点,我们对算法、界面及相关特性进行了封装,形成了一款针对动态冲击仿真的专业化软件LiToDyna。

算例1:人头靠垫冲击分析
人头与靠垫的冲击模拟是汽车行业中一项常规分析,通过分析人头冲击过程中应力危险区域,能帮助更好改进靠垫产品。
步骤1
导入模型并划分网格。导入人头与靠垫CAD几何模型,通过LiToSim前处理模块,自动对几何划分为四面体网格。

几何与网格
步骤2
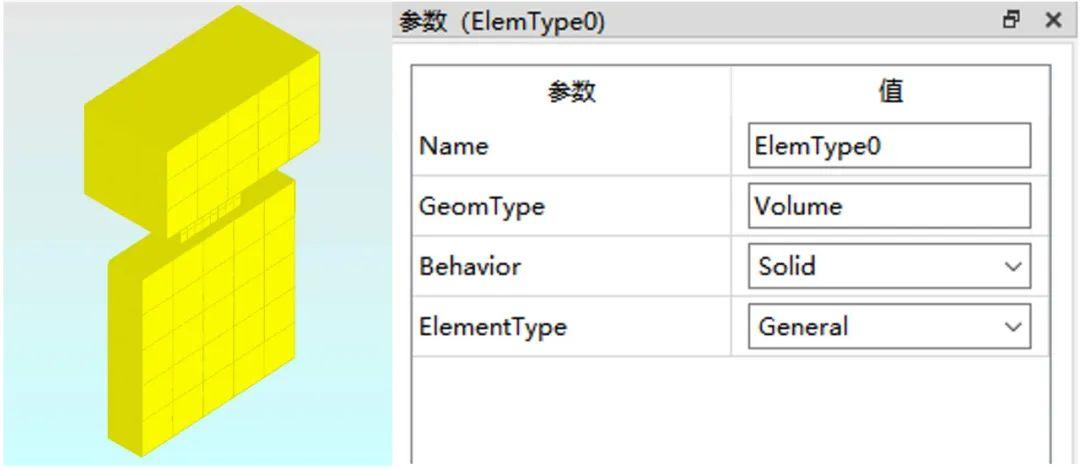
赋予单元类型。连续选择两个区域,赋予Solid General单元类型。

单元类型
步骤3
设置材料属性。定义两种线弹性模型,分别赋予人头区域与靠垫区域。
步骤4
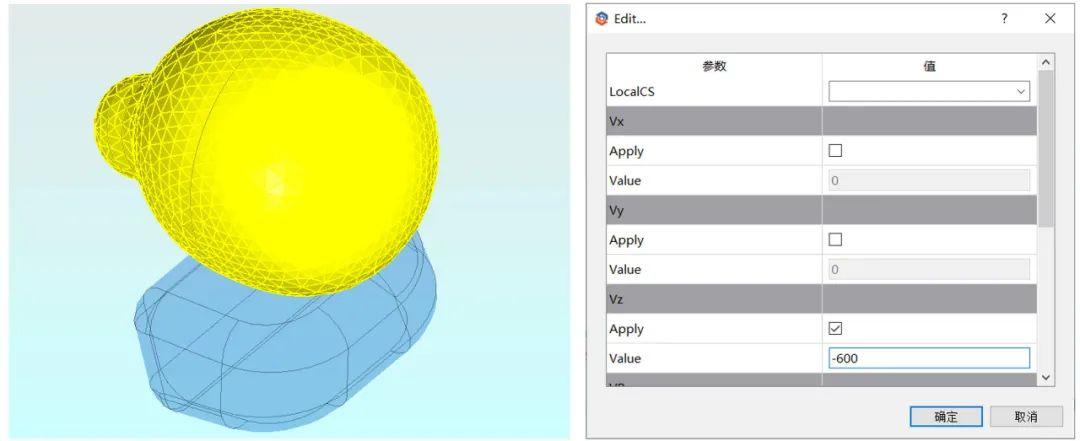
赋予初始条件。对人头区域赋予-600cm/s的初始速度。
步骤5
设置约束。对靠垫底部面施加固定约束。
步骤6
设置接触类型。预保存人头的下表面与靠垫的上表面,分别设置为master与slave,选择自主研发的接触算法Bipotential算法,定义摩擦系数为0.15,如下图所示。
 主面 从面
主面 从面 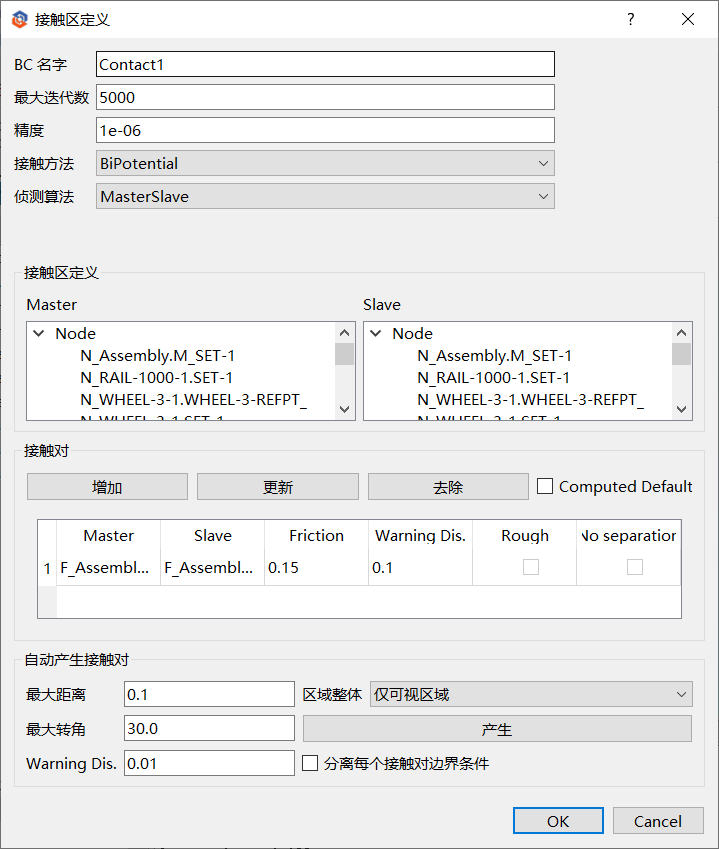
步骤7
设置求解控制参数。模拟人头冲击靠垫时间设置为0.15s,选择自动步长,其他参数均选用默认,即可进行求解。

步骤8

位移云图 应力云图

头部应力云图 靠椅应力云图
步骤9


算例2:器件撞针冲击分析
在电子领域,存在很多插拔器件,插入过程往往会对器件撞针造成损害,所以工程师常常对器件撞针进行动力学分析,根据其应力响应,分析疲劳寿命,而器件撞针冲击分析是基础。
步骤1
 几何与网格
几何与网格
赋予单元类型。对器件1、撞针、器件2均设置为Solid General单元类型。
 单元类型
单元类型
步骤3
赋予材料属性。器件1、撞针、器件2均选择Elasticity Isotropy模型。
步骤4
设置初始条件与约束。固定器件1上表面,对器件2施加一个15cm/s的初始速度,垂直撞向撞针。

步骤5
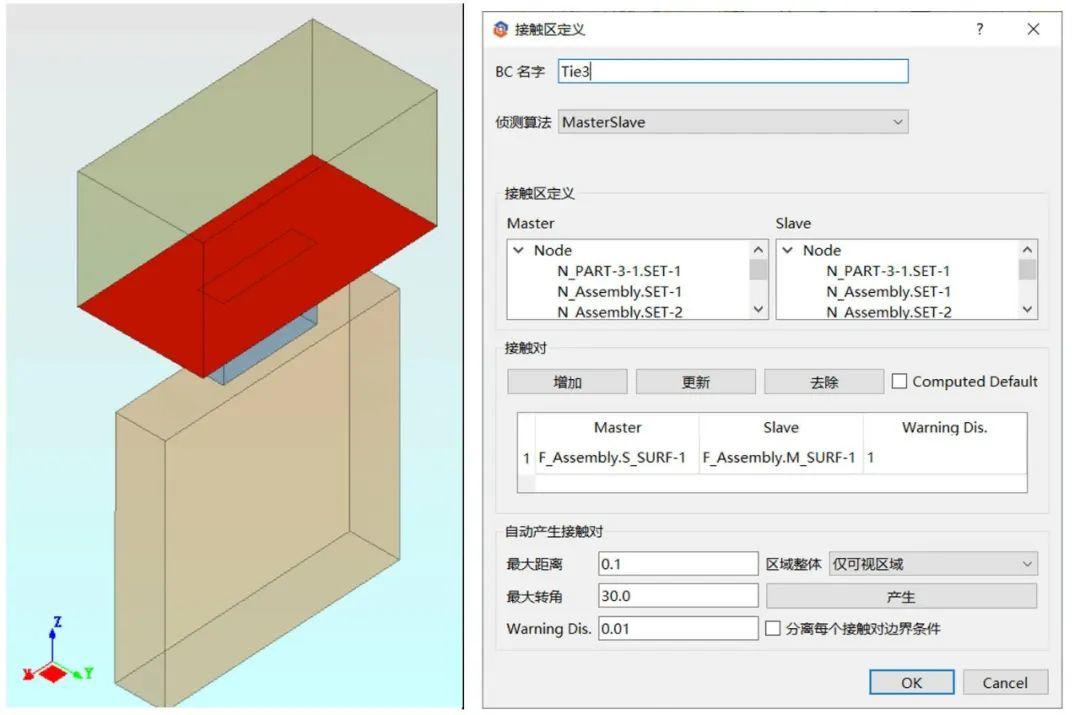
绑定关系定义

接触关系定义
步骤6
设置求解控制参数。选择动态求解参数,定求解目时间为0.45s,选择固定步长,其他参数均选用默认,进行求解。
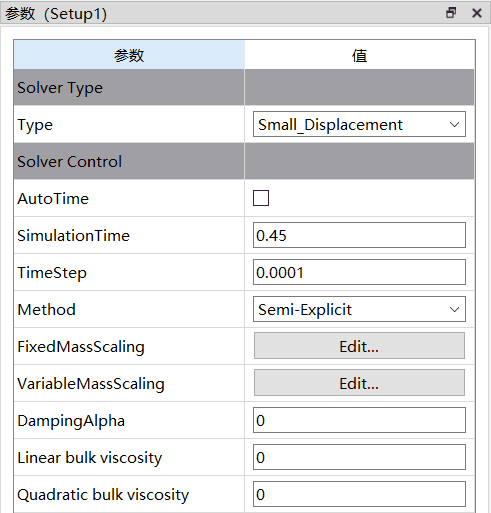
求解
步骤7
查看求解结果。从位移云图与应力云图,可以观察整个撞击过程撞针的变形与受力情况。

位移云图 应力云图
步骤8
输出应力响应曲线并构造动态包络图,从整个动态包络线可以分析出结构的危险时段。仿真结果可以很好地与国外CAE软件对标。

动态包络图
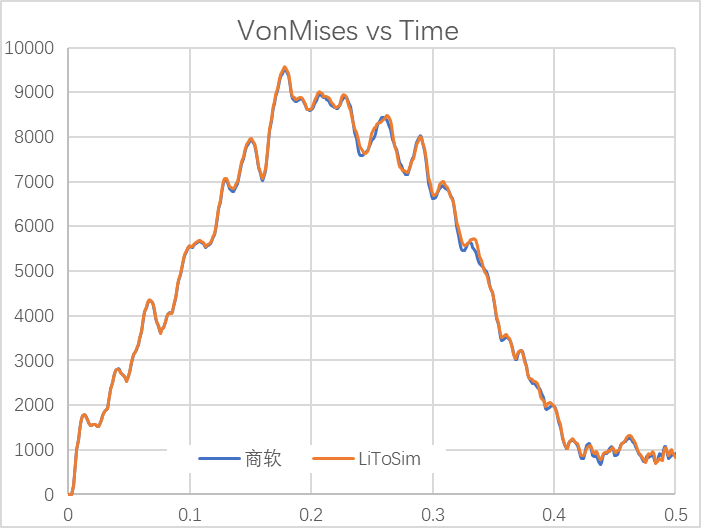
应力响应对比

通过以上两个案例,基本展示了LiToSim显式动力学的分析能力。LiToSim独立开发了显式动力学相关算法,可以适配并解决一般的显式动力学问题。LiToSim秉承独立自主路线,致力于打造国产自主可控的CAE仿真软件。团队会继续关注显式动力学问题,开发更多相关模块,系统化整合解决冲击动力学问题。

Peng L, Feng ZQ, Joli P, A semi-explicit algorithm for solving multibody contact dynamics with large deformation, International Journal of Non-Linear Mechanics, 103, 82-92 (2018)
Feng ZQ, Renaud C, Cros JM, Zhang HW, Guan ZQ, A finite element finite-strain formulation for modeling colliding blocks of Gent materials, International Journal of Solids and Structures, 47, 2215-2222 (2010)
Feng ZQ, Cros JM, Renaud C, Finite element simulation of impact problems - Some comparison results between FER/Impact and RADIOSS, 2nd European Hyperworks Technology Conference (EHTC 2008), Strasbourg, France (Sept. 30 – Oct. 1, 2008)
Feng ZQ, Vallée C, Fortuné D, Peyraut F, The 3é hyperelastic model applied to the modeling of 3D impact problems, Finite Elements in Analysis and Design, 43, 51-58 (2006)
Feng ZQ, Magnain B, Cros JM, Solution of large deformation impact problems with friction between Blatz-Ko hyperelastic bodies, International Journal of Engineering Science, 44, 113-126 (2006)
Feng ZQ, Joli P, Cros JM, Magnain B, The bi-potential method applied for the modeling of dynamic problems with friction, Computational Mechanics, 36(5), 375 - 383 (2005)
Feng ZQ, Joli P, Séguy N, FER/Mech - A software with interactive graphics for the dynamic analysis of multibody systems, Advances in Engineering Software, 35, 1-8 (2004)
Feng ZQ, Feng ZG, Domaszewski M, Some computational aspects for analysis of low and high-velocity impact of deformable bodies, International Journal of Non-Linear Mechanics, 37(6), 1029-1036 (2002)
Koo JS, Feng ZQ, Domaszewski M, Renaudin F, Theoretical and numerical study of a coupler for crashworthy design of a TGV power car, Integrated Design and Manufacturing in Mechanical Engineering, JL. Batoz, P. Chedmail, G. Cognet and C. Fortin (Eds.), Kluwer Academic Publishers (1999)
End
重庆励颐拓软件有限公司,于2018年7月6日成立,总部位于两江新区中瑞(重庆两江)产业园,在法国巴黎、上海、青岛设有研发中心,同时正在筹备设立成都研发中心。
公司由首席科学家冯志强教授领衔,拥有两院院士及国内外顶级专家组成的顾问团队,并与国内外多个科研团队建立密切合作;公司研发人员占比超过90%,且均为硕士及以上学历。
公司基于冯志强教授团队在理论、模型、算法、软件架构等方面三十余年的技术积累,致力于开发完全自主可控、具有国际先进水平的高端通用CAE软件LiToSim, 并协助不同领域用户开发服务于其核心产品的专用仿真软件,为研究成果积累、行业知识沉淀、CAE人才培养及产品自主创新提供良好的生态环境,为共同打造国产自主可控CAE软件贡献力量。



