如何在 SYNOPSYS 中使用光线追迹

本文介绍了 SYNOPSYS 的光线追迹功能,简单阐述了光线追迹功能的作用以及如何在 SYNOPSYS 中打开使用这个功能。
简介
熟悉其他镜头设计规范的人已经知道两种常见的光瞳定义:一种是近轴光瞳,仅适用于简单系统或光阑位于前面的地方。对于更复杂的系统,使用“光线追迹”可以在系统内部某处模拟一个真实光瞳,对其进行建模。
光线追迹和广角光瞳
上述讨论涉及广义上的光线追迹。在分析图像时,必须确保追迹到合适的光线束。一些程序通过在光阑创建一个网格来实现这一点,然后通过迭代找到一条击中该网格中每个点的光线。虽然这个方法十分有效,但它非常慢。但是 SYNOPSYS 可以通过仅迭代五条光线来找到光瞳轮廓,然后用统一的网格填充以定义光瞳。一旦找到光瞳就不需要后续的迭代计算,因此大大加快了计算速度。
在 RLE 或 CHG 文件中的输入 WAP 1将实施第一个广角光瞳选项,这将设置输入光束的半径为 YMP1,该半径垂直于主光线而不是垂直于光轴,而且 WAP 1使入射光束的直径在所有视场角下保持恒定。
在近轴光瞳不适用的系统中,系统选项 WAP 3提供了另一种控制光瞳大小和形状的方法。使用这个选项,程序通常会追迹主光线的每个视场,在光瞳的顶部、底部和两侧找到极限光线;这些光线是那些刚刚通过镜头中所有 CAO、RAO 和 EAO 孔径的光线(记住,WAP 2只考虑光阑的 CAO)。首先追迹子午线,主光线被定义为顶部和底部光线之间的中点(即使它可能没有通过真实光阑面的中心)。然后在这条光线的左右进行倾斜光线搜索。得到的光瞳通常是椭圆形的(如果 RPUPIL 有效的话为矩形)。WAP 3不能将 CAO 设置在光束可能出现焦散的地方。WAP 3可以调整光瞳的高度和宽度,以通过所有表面的孔径,避免光线失效。WAP 3是 WAP 选项中最耗时的,而且在优化过程中,光瞳的大小可能会有很大的变化,从而产生错误的结果,所以 WAP 3主要用于分析镜头完全设计好的结构。
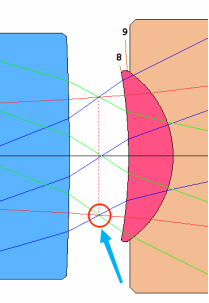
镜头通常在系统内部有一个“光阑”,打开“STOP_PUPIL_DEMO.RLE”镜头文件,打开 PAD 图,如下图所示,这是简单的近轴光阑得到的结果。

由上图可知,主光线没有通过指定的光阑(表面7)的中心。这是因为在目前的设置中,没有光线追迹,近轴主光线由于光瞳像差而错过光阑中心。
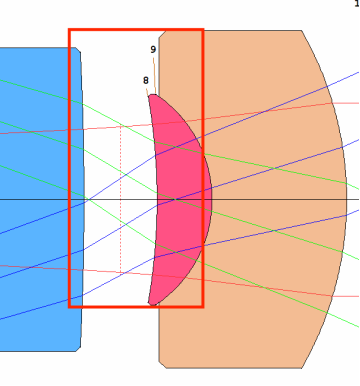
通过系统设置>物,光阑和光瞳打开界面,在光阑处选择真实光阑搜索,然后点击 PAD 图中的“更新”按钮来更新镜头布局,如下图所示。由图中可以看到边缘场的主光线通过光阑( Surface 7)的中心,就像它应该的那样。现在主光线是好的,但是边缘场的边缘光线没有通过光阑的边缘。我们需要另一个常见的声明,它将调整光瞳的大小,以便很好地填充光阑。



打开 SPS 表,将表面7的孔径改为“用户定义的圆形孔径”,点击设置,表面7的外孔径就变成了圆形。打开物,光阑和光瞳的界面,将光瞳选择“广角光瞳类型 2 (WAP 2)”以替换默认的近轴光瞳,这是 WAP 2选项(有三种广角–光瞳(WAP)。它通过在光阑的边缘迭代一些光线来找到入瞳的形状。但是这个选项需要在光阑表面上设置一个硬性通光口径,以便于光线追迹。单击 PAD 中的“更新”按钮,然后出现如下所示的镜头。现在,主光线和边缘光线都通过打开系统的“光线追迹”来到达表面7上的正确位置。