Ansys Workbench工程应用之——结构非线性(中):状态非线性(1)接触基础

本文摘要(由AI生成):
本文介绍了轴承作为限制旋转机械部件运动和旋转的二维弹性元件在转子动力学分析中的重要性。同时,文章详细阐述了轴承连接的设置方式,其类似于弹簧连接并具有纵向刚度和阻尼的结构特征。此外,文章还探讨了网格接触在连接不连续体网格划分中的应用,以及通过End Release释放末端自由度来处理梁体间的铰接关系。最后,通过实例对比了不同连接方式(Form New Part、Bonded、Joint-Fixed)在方管连接中的区别和效果,并总结了各种连接方式的适用场景。
如果您能看到这篇文章,请不忘关注与点赞,您的支持,就是我们创作的动力。
结构非线性中的几何非线性与材料非线性已总结完,现在开始总结状态非线性,状态非线性主要包括接触和状态分离,本文主要介绍接触的相关基础概念。
在《一线工程师总结Ansys Workbench连接关系——接触分析实例详解》一文中,对接触状态做了简单介绍,本文再次回顾并更深入地探讨。
1 接触概述
接触状态表现为两个相互分离的表面发生碰撞时相切。Workbench中将接触状态分为分离状态、接近状态、粘接状态、滑动状态。

非线性接触:在形成接触的不同物体的表面之间,可以沿法向分开和沿切向相互移动,但不能发生相互渗透,可传递法向压缩与切向摩擦力,但不能传递拉伸力。接触面接触时产生接触约束,接触面一旦分离,约束失效。此时的接触表现为强非线性,随着接触状态的改变,接触表面的法线和切向刚度都有显著变化。刚度突变会导致严重的收敛困难。
物体在接触过程中是不允许穿透的,在有限元分析过程中,如果不允许穿透,物体之间发生接触或者取消接触时,会出现阶跃函数,导致收敛困难;如果允许一些极轻微的穿透,接触不是一个突变函数,则较容易收敛。

2 Workbench接触数值方法
在Mechanical中,一个手动设置的接触的属性选项如下图。
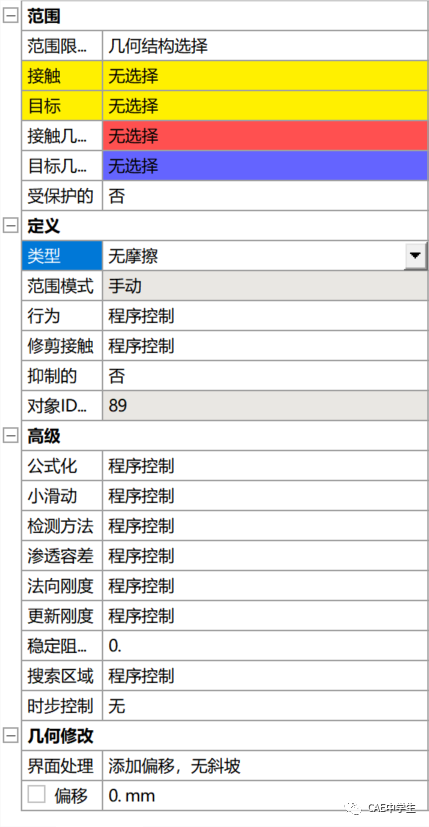
在Mechanical中接触面显示为红色,目标面显示为蓝色。程序默认为对称接触( Symmetric ),此时任何一边都可穿透到另一边。对称接触行为更容易建立,但需要较大计算量。选择非对称接触(Asymmetric)时,接触面的节点不能穿透目标面,而允许目标面穿透接触面。选择自动非对称接触(Auto Asymmetric )时接触面和目标面的指定可在内部互换。只有罚函数和增强拉格朗日算法支持对称行为,普通拉格朗日和MPC(多点约束)算法要求使用非对称行为。
对于非对称接触行为,手工选择接触表面时应遵循目标面傻大粗原则:
1, 当凸面与平面或凹面接触时,应选择平面或凹面为目标面。
2, 当硬表面和软表面接触时,应选择硬表面为目标面。
3, 大表面和小表面接触时,应选择大表面为目标面。
4, 精细网格与粗糙网格接触时,应选择粗糙网格为目标面。
5, 当高阶网格与低阶网格接触时,应选择低阶网格为目标面。
在Mechanical中,系统提供了5种接触类型:
•绑定Bonded:即接触界面焊接在一起,既不能分离也不能滑动。
•不分离No Separation:不允许分离,允许微量自由滑动。
•无摩擦Frictionless:允许分离,允许自由滑动。
•粗糙Rough:允许分离,不允许滑动。
•摩擦Frictional:允许分离,允许有摩擦的滑动。
•强制摩擦滑动 Forced Frictional Sliding:在每个接触点上施加一个切向阻力,仅用于显示动力学。

为了阻止接触表面相互穿透,在相互接触处需要建立一定的规则,即接触算法。ANSYS 采用的是接触约束算法,它提供了如下五种接触约束算法:罚函数法Pure Penalty(程序控制默认使用的算法),增广拉格朗日法Augmented Lagrange,法向拉格朗日法Normal lagrange,多点约束方程法MРC,梁约束法 Beam。每种算法的详细解释见《一线工程师总结Ansys Workbench连接关系——接触分析实例详解》。

其中Fn、Ft分别为法向接触力、切向接触力,Kn、Kt为法向刚度、切向刚度,Xn、Xt为法向穿透量、切向滑移量,λ为附加常数。
修剪接触用于自动减少接触对数量,从而加快求解速度,对存在大面积接触对的情况更为有效。
推荐使用程序控制选项,系统默认是On(打开),但是对于用户手动创建的接触不会执行修剪。注意如果有大挠度的滑移必须设置Off (关闭),否则在原始接触边缘外出现穿透现象,或者定义Trim Tolerance (修剪公差),以保证足够的接触区域。
2.4.2 小滑动
手动设置为开启表示打开小滑动,设置为关闭表示打开有限滑动,设置为程序控制表示由程序判断是否打开小滑动。

有限滑动允许接触面出现任意大小的相对滑动与转动,一般用于两个接触面相对滑动或转动量较大的情况。相比小滑动的算法,有限滑动耗费的计算资源多,求解时间长
小滑动假设接触面之间发生的相对滑动小于接触长度的20%,对于大变形分析,此选项仍允许任意大旋转。小滑动从初始配置确定的每个接触检测点总是与相同的目标元素连接,在整个分析过程中这种接触关系不会再发生变化。因此,小滑移的计算代价小于有限滑移,使得小滑动算法更高效和稳健。所以在进行仅有小滑移问题的计算时(如绑定),可以激活小滑动,使计算更加稳定,收敛速度更快。
自适应小滑动从每个子步开始状态(而不是初始配置)确定每个接触检测点总是与相同的目标元素连接,而在下一个子步允许重新配置每个接触检测点与目标元素的连接。与有限滑动逻辑相比,自适应小滑动逻辑通常可以提高鲁棒性,与小滑动逻辑相比还可以提高求解精度。它可以处理接触对最初处于远场然后开始接触的情况。
如果大变形属性设置为关闭或公式属性设置为绑定接触,则在大多数情况下,小滑动属性的程序控制设置会自动将该属性设置为打开。
2.4.3 检测方法
检测方法即接触探测方法。纯罚函数和增广拉格朗日法默认基于高斯积分点的探测(On Gauss Points),一般比节点的探测更准确,计算时间更短;拉格朗日和MPC法默认基于节点的探测(On Nodes-Normal from Contact和On Nodes-Normal to Target),较高斯积分点的探测点更少。

当有摩擦的接触面和目标面之间存在滑移时,为更好的满足力矩平衡可选用节点-投影法向接触Nodal-Projection Normal from Contact,不适用于MPC约束。
2.4.4 渗透容差与弹性滑动容差
渗透容差也叫穿透容差,即允许穿透量,应用于纯罚函数与增广拉格朗日法,代表Fn=Kn*Xn中的Xn,一般使用程序控制,程序控制默认为0.1*单元厚度,用户可以设置为数值(Value)或因子(Factor),因子即相较于下层单元的厚度比例,注意如果定义的过小,将大大增加计算时间,且计算很难收敛 。
弹性滑动容差也叫切向滑移容差。代表Ft=Kt*Xt中的Xt一般使用程序控制,程序控制默认为0.01*单元长度、用户可以设置为数值(Value)或因子(Factor),因子即相较于下层单元的长度比例。如果弹性滑移在许可的容差范围内,接触协调性在切向满足要求。应用于绑定、粗糙、摩擦接触类型。

2.4.5 法向刚度
法向刚度即Kn值,刚度越大,计算越精确,但是越难收敛。默认为程序控制,对于绑定和不分离约束,默认K=10;对于其他形式的接触,默认K=1.0;手动控制时,对于体积为主的问题,建议设置为1,对于弯曲为主的问题,建议设置0.01~0.1之间。
更新刚度默认为每次迭代,表示每次平衡迭代后自动更新接触刚度。
2.4.6 探索区域(球形域)
球形域是以接触单元的积分点为圆心定制的一个球形(3D)或圆形(2D)区域,球形域作用在于①设置接触面与目标面的允许间隙量,以区分接触的远近区域,提高计算效率; ②定义初始穿透大的接触。
对于线性接触的绑定和不分离,指定球形域内即认为接触,将忽略球形域内的间隙或穿透。
对于非线性接触,球形域只是用于定义了将发生计算的搜索范围,程序会执行额外的计算来确定两个物体是否真正接触。
如果设置为程序默认(Program Controlled),对于柔性体接触,球形域半径大小为接触下层单元深度,等同于因数(Factor)设置为1。

2.4.7 稳定阻尼因数
稳定阻尼因数用于非线性接触,它提供了一定的阻尼来抑制接触面之间的相对运动,并防止刚体平移。这种接触阻尼系数应用于非线性接触。只要接触状态处于开放状态,稳定阻尼系数就会被施加。稳定阻尼系数的值既要足够大,以防止刚体运动,要相当小,以确保正确求解,默认值为1。
2.4.8 时步控制
时步控制仅适用于非线性接触,它可以根据接触状态的变化判定是否需要自动控制时间步长,默认为“无”。”自动平分“是在每个子步计算完成后,对接触状态进行分析,如果存在接触状态的突变,将子步自动二分; ”预测影响“即自动预测接触行为突变的最小时间增量并分割子步,推荐该选项。”使用影响约束“是通过自动调整时间增量来激活影响约束,此选项包括对穿透和相对速度的限制,以更准确地预测冲击持续时间和分离后的回弹速度。
2.4.9 接触界面处理
当接触类型为线性接触时,程序将忽略干涉与间隙,不需要处理接触界面。所以此选项仅在设置了非线性接触后出现。
接触界面处理将接触面偏移一定量,以保证初始无间隙的接触状态,偏移表现为一种数学偏移,节点和单元都没有修改,其核心就是在初始间隙区建立一个刚性域以填补界面上的间隙。
接触界面处理可分为无增量的偏移(Add Offset,No Ramping), 线性增量偏移(Add Offset,Ramped Effects), 自动接触(Adjust To Touch)。
Add Offset...由用户指定偏移数值,正表示闭合间隙,甚至过盈;负表示加大间隙。Ramped Effects表示一个载荷步分割为几个子步逐步施加,有利于提高收敛; No Ramped表示在第一步就全部加载载荷。
Adjusted to Touch表示由软件自动调整至接触,界面上存在的间隙将会自动补偿到接触状态,界面上存在的干涉将被自动消除,前提是需间隙和干涉在弹球范围内。推荐使用此设置。

2.4.10 接触/目标几何矫正
接触/目标几何矫正默认为无,可选项为光滑和螺栓截面。
1,光滑
接触计算时,可以用线性单元代替二次单元。但是由于线性单元的形函数决定了圆弧或曲面边缘不光滑,采用该选项不需要二次单元即可得到较精确的曲面有限元模型。

2,螺栓螺纹
在模拟螺栓螺纹时,螺纹的网格离散化在计算上很耗资源。对于主要螺栓功能是传递载荷的系统级建模,建模时往往不会创建螺纹细节。
该技术可应用于 3D 模型或 2D 轴对称模型。不需要对螺纹进行网格离散化。相反,您可以在螺栓和螺栓孔几何形状上对光滑的圆柱表面进行建模,这有助于确保高质量的单元网格。接触法线是根据用户指定的螺纹几何数据和螺栓轴的两个端点在内部计算的。
此功能仅适用于接触面,不适用于目标面。可输入参数为: 螺纹中径(注意这和我们常用的螺纹标注为大径不同),螺纹节距,牙型角,螺纹类型(单导程、双导程、三导程),旋向(左旋或右旋)。
此功能仅适用于接触面,不适用于目标面。可输入参数为: 螺纹中径(注意这和我们常用的螺纹标注为大径不同),螺纹节距,牙型角,螺纹类型(单导程、双导程、三导程),旋向(左旋或右旋)。

3 Workbench中其他连接方式
Joint核心即为MPC接触形式,采用约束方程定义实体之间或者实体与大地之间的连接关系。
关节通常用作将主体连接在一起的连接点。关节类型的特征是固定的还是自由的取决于它们的旋转和平移自由度。如果您将关节指定为远程附件,则它被归类为远程边界条件。

弹簧包括纵向弹簧和扭转弹簧(Beta),弹簧是将两个物体连接在一起或将一个物体接地。
纵向弹簧产生的力取决于线性位移,可用作阻尼力,它分别是速度或角速度的函数。弹簧也可以直接定义在旋转接头或圆柱接头上。
当定义为远程附件时,弹簧被视为远程边界条件。要显示远程点,您可以显示选项卡的远程点连接选项来显示范围和远程点之间的连接线。如果使用直接选取,则只能选取点,比例顶点、单元节点等。

梁连接的设置与弹簧连接相同。梁连接使用可以承载弯曲载荷的结构梁单元。梁选项使您能够指定体对体或体对地连接。此功能支持所有结构分析。
点焊连接核心即为两者之间采用网状刚性梁(Beam188)连接。
点焊在实体、曲面和线体零件之间传递结构载荷和热载荷以及结构效应。因此,它们适用于位移、应力、弹性应变、热和频率解决方案。
点焊可以从CAD模型读取,也可以在WB中手动生成。DesignModeler 和 SpaceClaim 应用程序可用于生成点焊。目前唯一可以在 WB中完全实现点焊的CAD系统是 NX。其余 CAD系统的 API 要么不处理点焊,要么 Ansys Workbench 不从这些其他 CAD 系统读取点焊。如果要在WB中手动定义点焊,需要注意在模型在所需位置包含顶点。
轴承连接需要输入刚度和阻尼参数,以定义接触关系。其核心即为两者之间用Combin214连接。
轴承是用于限制旋转机械部件的相对运动和旋转的二维弹性元件。轴承是转子动力学分析的关键支撑。
轴承连接的设置类似于弹簧连接,可设置体—地或体—体的连接,轴承具有纵向刚度和阻尼的结构特征。除了这些特性外,轴承还通过耦合刚度和阻尼来增强,这些阻尼作为机械部件在旋转平面中运动的阻力。

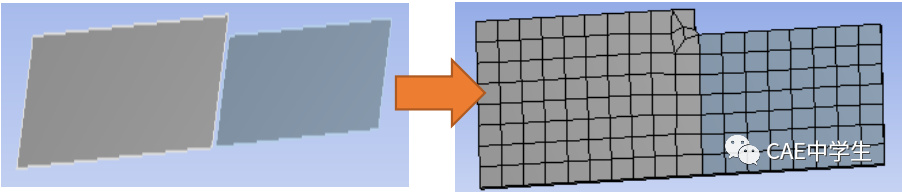
网格接触可以帮助连接不连续的体之间的网格划分,可通过自动或手动方式创建网格接触,注意需要将Tolerance Value设置为大于缝隙值。
在DM中,如果多段线组成一个线体,或者多个独立的线体通过From Nem Part组合,那么它们的连接处相当于焊接在一起。实际工况中,梁体之间有可能是铰接关系,如何处理呢?
对于刚性连接,需要通过End Release释放线体的末端自由度。在Mechanical中,添加接触组Connections,在接触组中添加末端释放End Release,在属性中分别选择顶点和线段,再设置释放哪个方向的自由度(梁单元有6个自由度)。详情见《一线工程师Ansys Workbench工程实例之——梁单元静力学分析》。

实例 不同连接方式对比(摘自文献1)
用Form New Part,bonded,Joint-Fixed分别连接方管,查看区别。
Step1 建模。
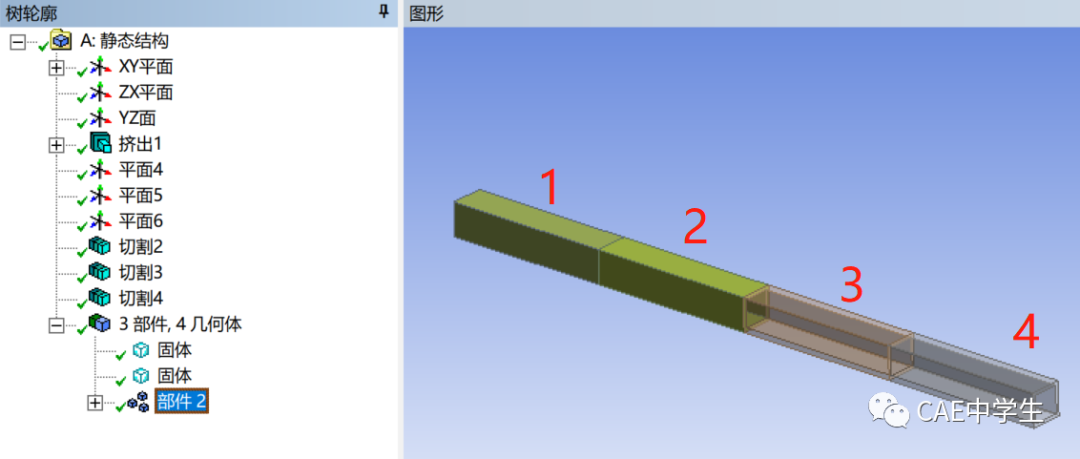
建立一个边长为25mm、壁厚为2.5mm、长度为500mm的方管,每隔125mm等分为一段,整个模型由4个零件组成。其中件1、件2用Form New Parts组合为一个部件。
Step2 定义接触。
点击Connections,删除自动生成的接触对。点击右键插入Manual Contact region,选择零件2、3的交界面, Type定义为Bonded,其余默认;同样点击右键插入Joint,选择零件3、4的交界面, Connection Typer定义为Body-Body, Type定义为Fixed,其余默认。


Step3 定义路径。
为观察线性化结果,定义路径(Path)。在Construction Geometry处点击右键插入Path,Path Type选择Two Points,设置起始坐标点,读者可依据自己的坐标系建立一条在方管上平面的中线路径。

Step4 定义边界条件。
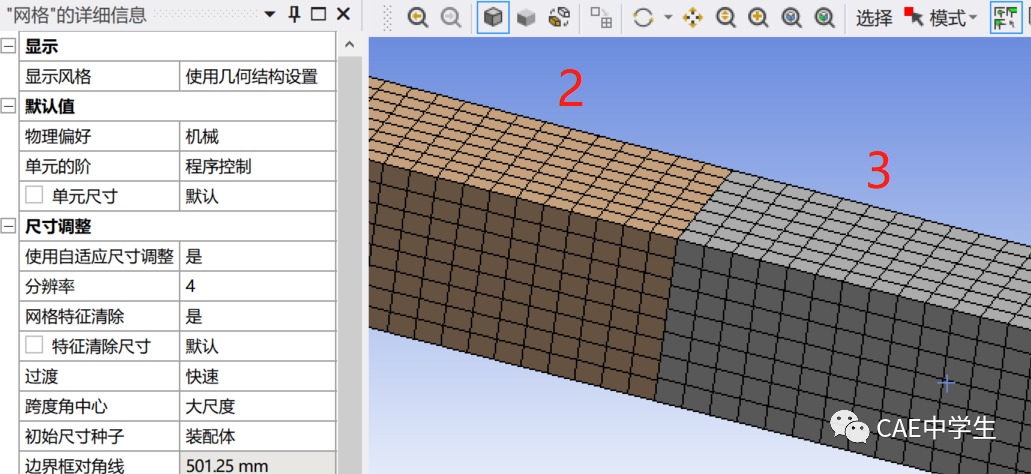
全局网格设置为自适应,分辨率设置为4,或者通过局部网格设置故意使2与3之间节点不对齐。
边界条件如图所示。件1端面加载完全约束,件4端面加载100N、Y向的力载荷。其余默认。

Step5 求解与后处理。
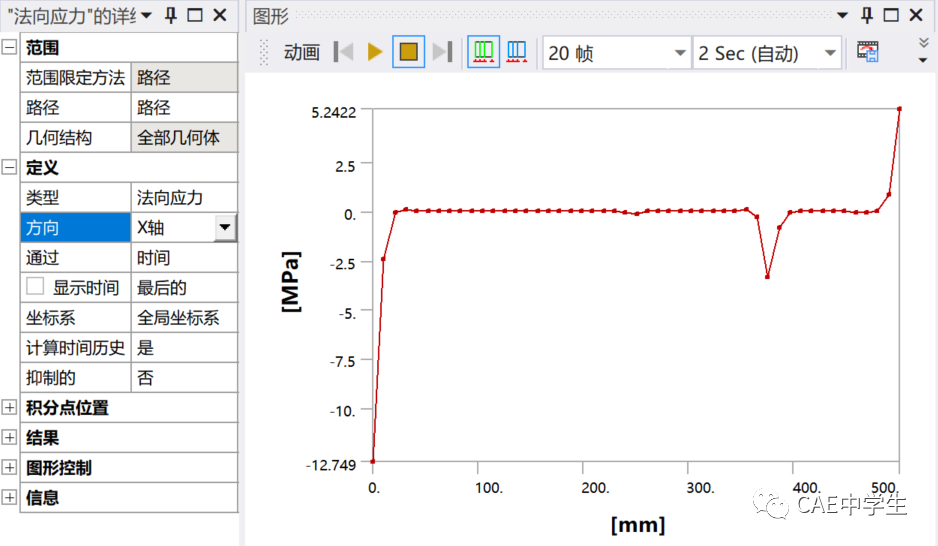
分别选取基于路径的XYZ三向应力,如图所示。在250mm处(对应Contacts-Bonded),XYZ三向应力较整体线性结果有微小偏差;在375mm处(对应Joints-Fixed),Z向(方管纵向)应力较整体线性结果略有偏差,XY两向应力较整体线性结果均有较大偏差。


扩展:
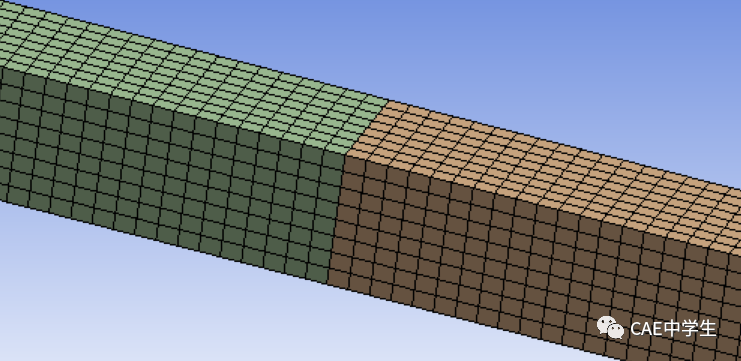
Form New Parts依据于节点对齐,共节点形式,1与2接触面的网格节点是对齐的。这样连接效果最好,表现为变形和应力均连续。
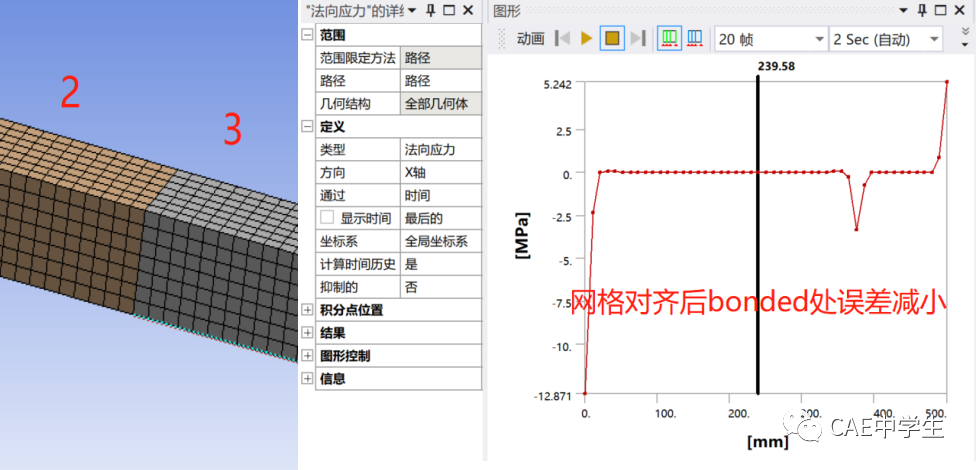
Contacts-Bonded依据于接触,并不要求节点对齐,表现为变形连续,应力不连续,这就是用Bonded接触产生应力偏差的原因之一。如果将接触物两者的网格对齐,或者将接触中的Formulation定义为mpc,均能减小此应力偏差。用于连接细节需要注意。

Joints-Fixed的实质是Contraint Equlvation,用于定义自由度的耦合关系。该连接方式由于依据自由度连接,在连接区域存在应力误差,可通过加密连接区域网格减小误差。用于忽略连接细节的连接,如较接、铆接等,特别适用于刚柔接触状态。
写在最后
至此,这是状态非线性的第一篇文章,主要参考了文献1。文章的理论知识比较繁杂,图惜没有精力一一试验,请读者对自己感兴趣的内容自行试验,如果结果与文中不符,请以实际试验结果为准。
由于图惜实践经验实在有限,文中也难免纰漏百出,敬请批评指正。
[1]《Ansys Workbench有限元分析实例详解》——周炬、苏金英
[2] ANSYS 2022帮助文件


