精品讲座:自适应与智能电子支援(提供PPT版课件下载)

精品讲座:自适应与智能电子支援(提供PPT版课件下载)
前言:
该报告是佐治亚理工学院的Marcus Quettan在2019年10月21至24日佛罗里达坦帕召开的第22届系统与任务工程年会上做的报告。该报告主要针对目前复杂战场电磁环境下,电子支援措施如何通过认知技术对低截获信号、捷变以及自适应波形、未知波形以及新型波形的卫星信号进行截获、探测、识别和定位。报告总结智能电子支援系统的主要特点,包括:
准确性:系统根据已知的输入做出最佳的决策或推断;
灵活性 :系统以合理的猜测或决策来响应新的输入;
可解释性:每个系统决策的推理可以被人类或者外部系统理解;
自适应性:系统可以从错误中学习,也可以在接收到新的输入后进行改变,这可能需要外部/操作员的帮助;
实时性 :该系统能够快速处理已知的或新的输入,从而有效地做出反应。
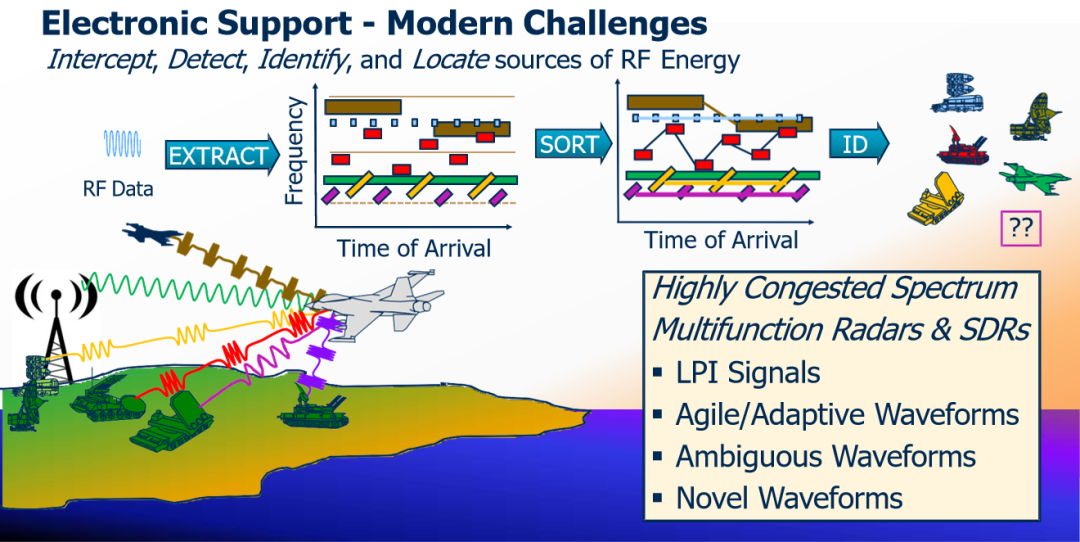
高度拥挤的频谱、多功能雷达和软件定义:
低截获信号;
捷变自适应波形;
未知波形;
新波形。
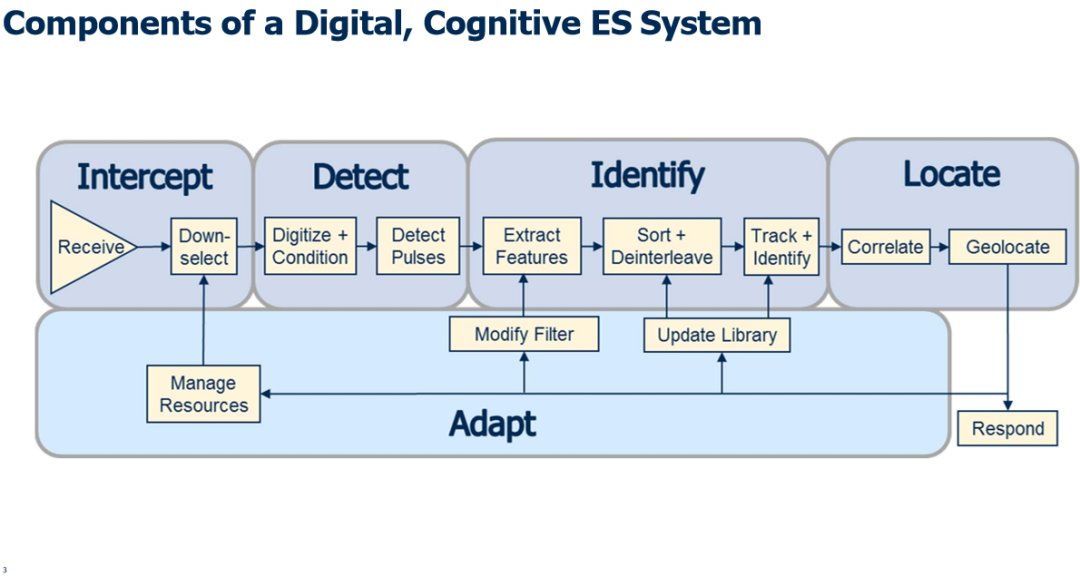
数字化、认知电子战系的组成。
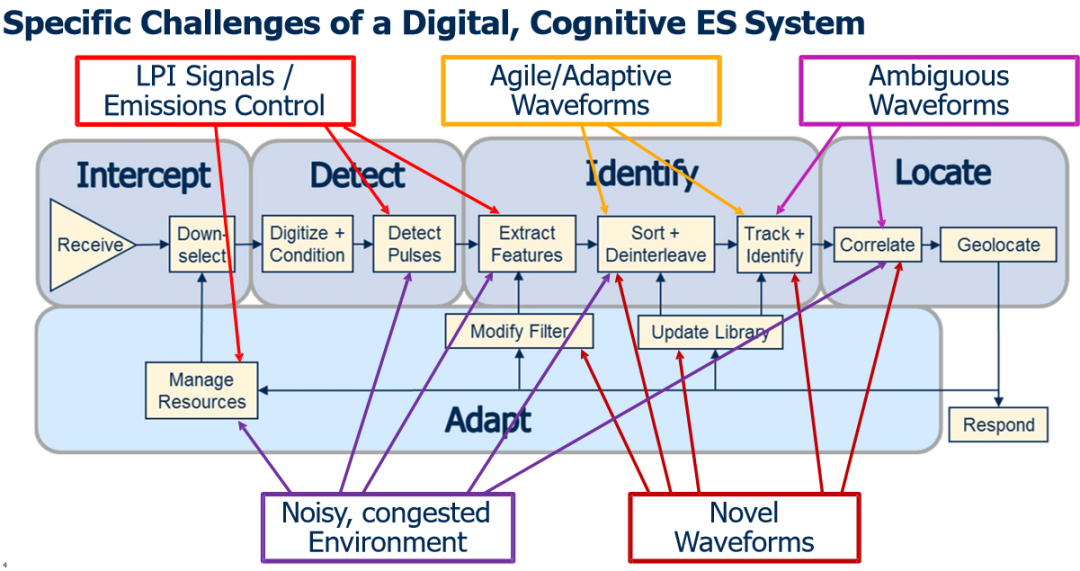
数字化、认知电子支援系统的具体挑战。

期望从智能的电子系统中获得什么收益?
准确性;
灵活性;
可解释性
自适应性
及时性。
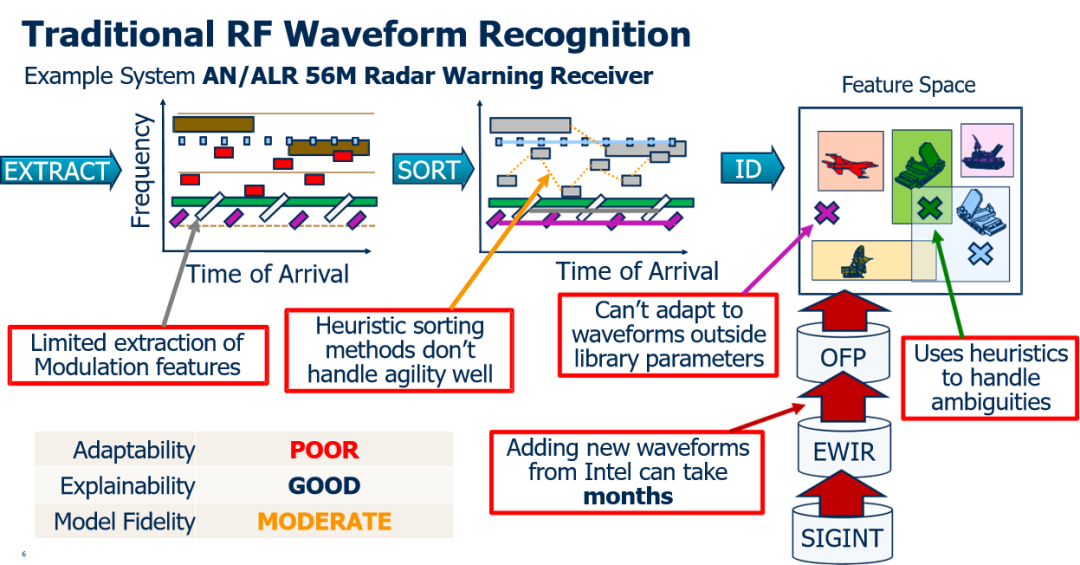
传统的射频波形认知:
(以美AN/ALR 56M 雷达告警接收机为例分析)
提取有限的调制特征
启发式的分选不能处理的捷变信号
无法适应参数库外的波形
增加新的波形可能需要长时间
使用启发性处理不明型号
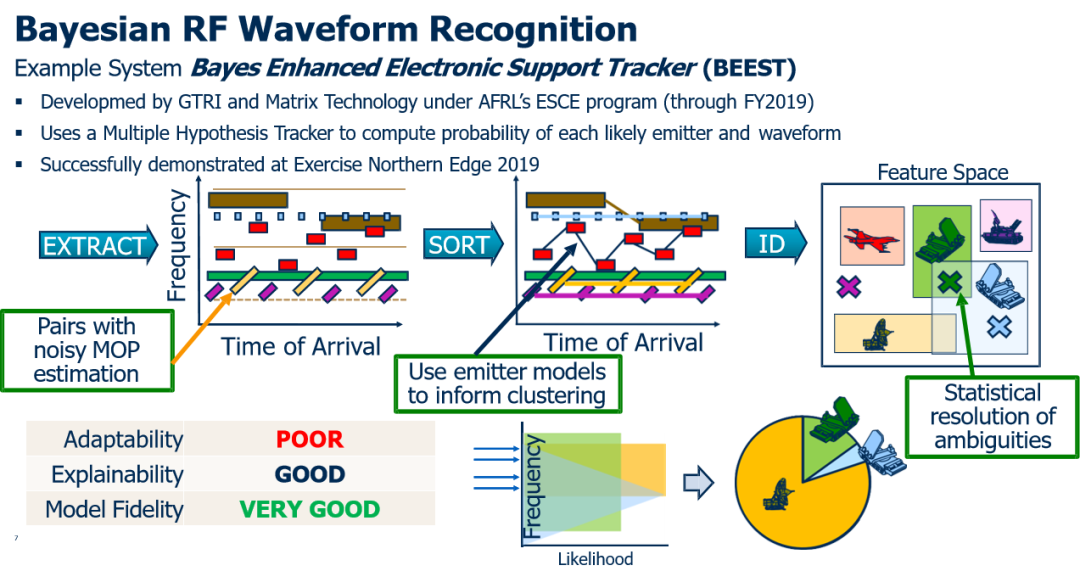
贝斯射频波形识别。
以基于贝叶斯增强型电子支援***为例。
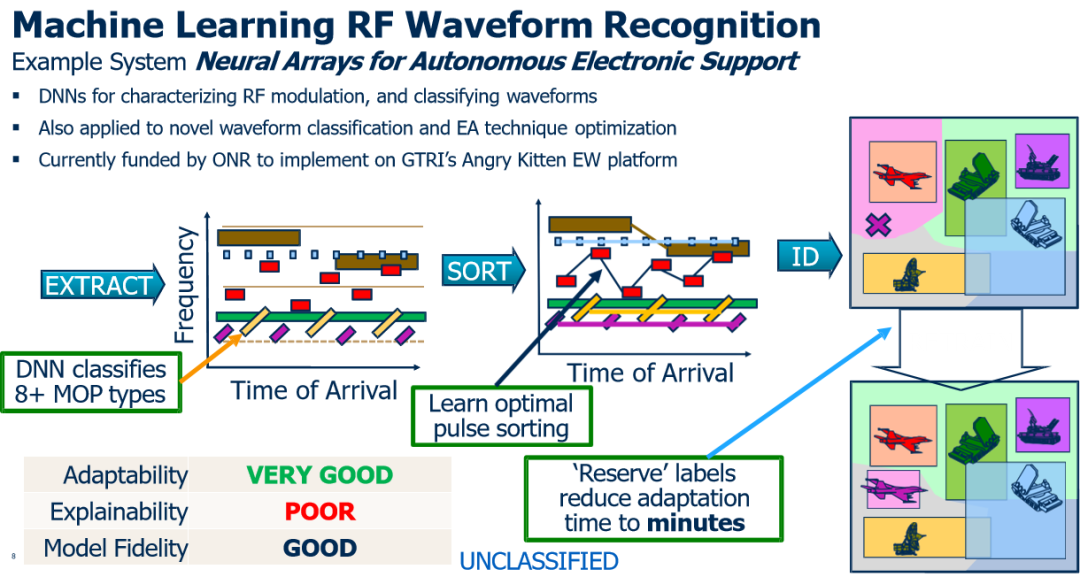
机器学习射频波形识别。
以基于神经阵列的自主电子支援系统为例分析。
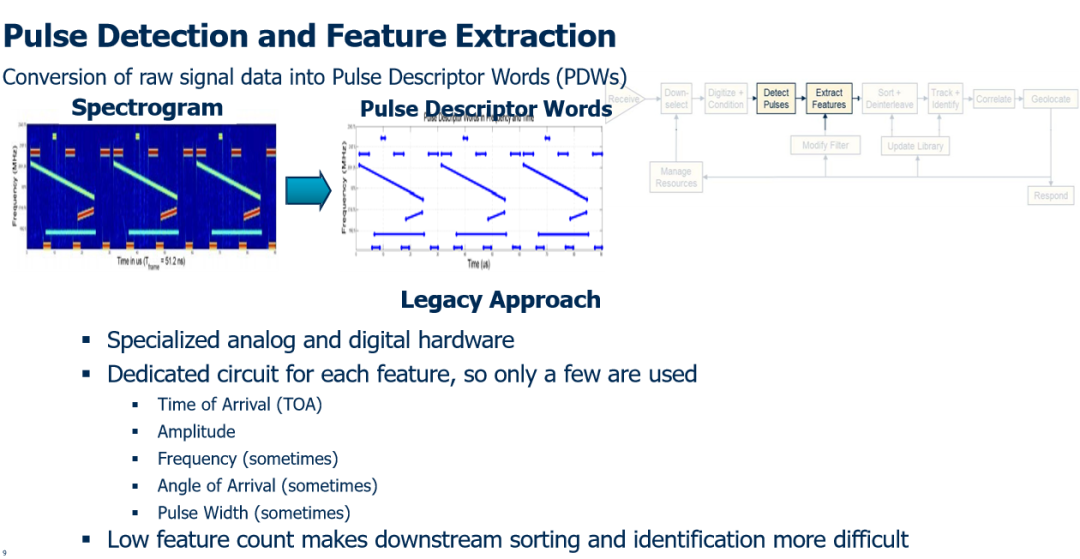
脉冲检测与特征提取
将原始数据转换为脉冲描述字(PDWs)
专业模拟和数字硬件
专用电路
低特征技术另分类和识别更加困难
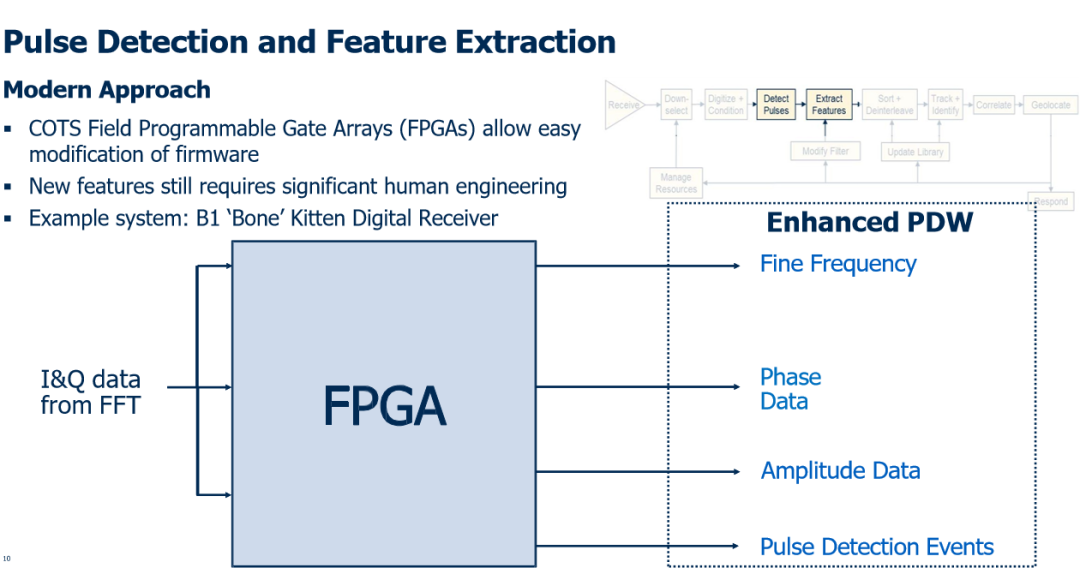
现代方法:
COTS现场可编程门阵列允许更改硬件
新增功能需要人工操作
实例系统:B1 Bone Kitten 数字接收机
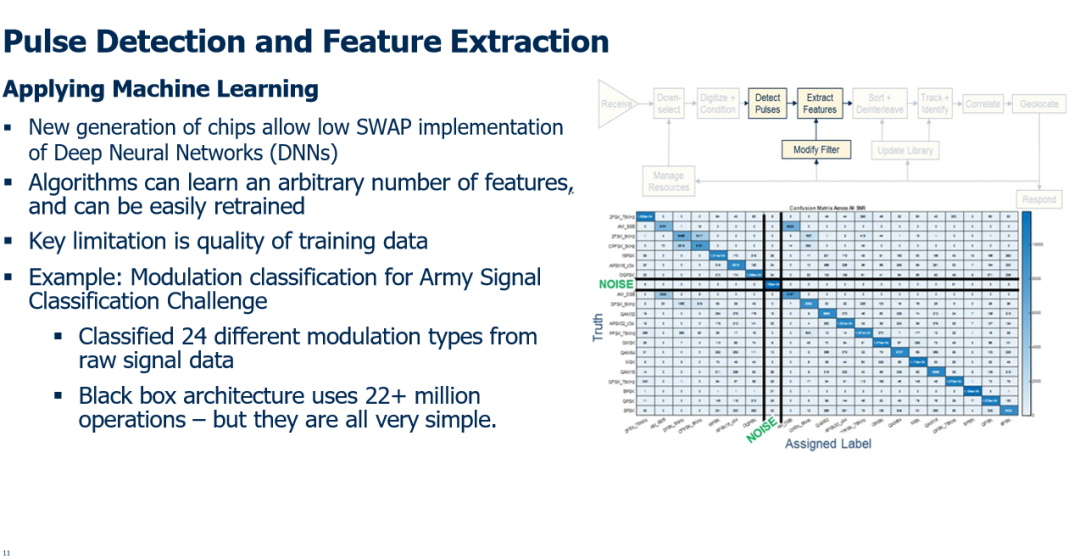
应用机器学习
新一代芯片允许深度神经网络的低SWAP运行
算法能够学习任意数量的特征,并且容易再训练
数据质量是关键的限制因素
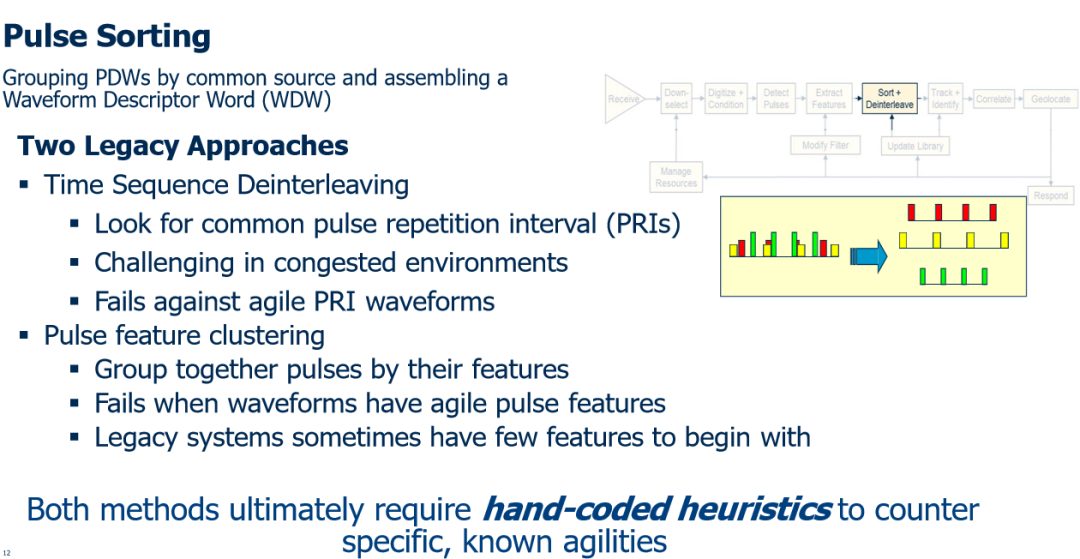
脉冲分选
按照公共源对脉冲描述子进行分类,并组成一个波形描述字。
两种传统方法:
时间序列去交织
脉冲特征聚类
上述两种方法最终都要人工编码以对抗特定的、已知捷变信号。
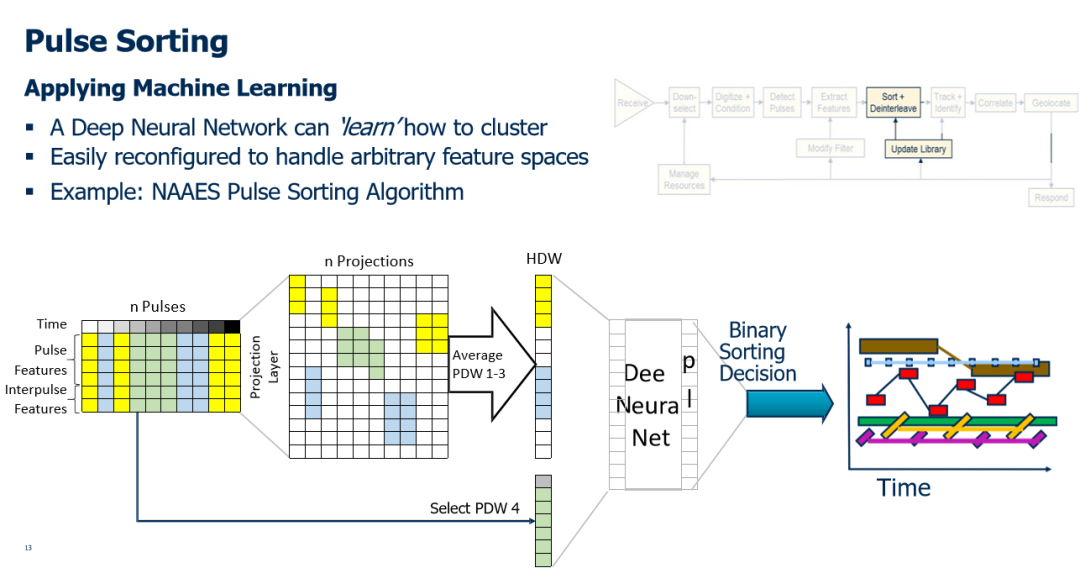
应用机器学习
深度神经网络可以学习如何聚类
易于重新配置以处理任意特征空间

波形和辐射源识别。
通过波形描述字WDW确定辐射源。
传统方法:
在任务数据文件表中查找
随着传感器数量的增多和波形灵活性增加,模糊性增加
没有固定的方法解决不确定。
通过依靠人工编码的启发式方法来对抗特定的、已知的不确定。
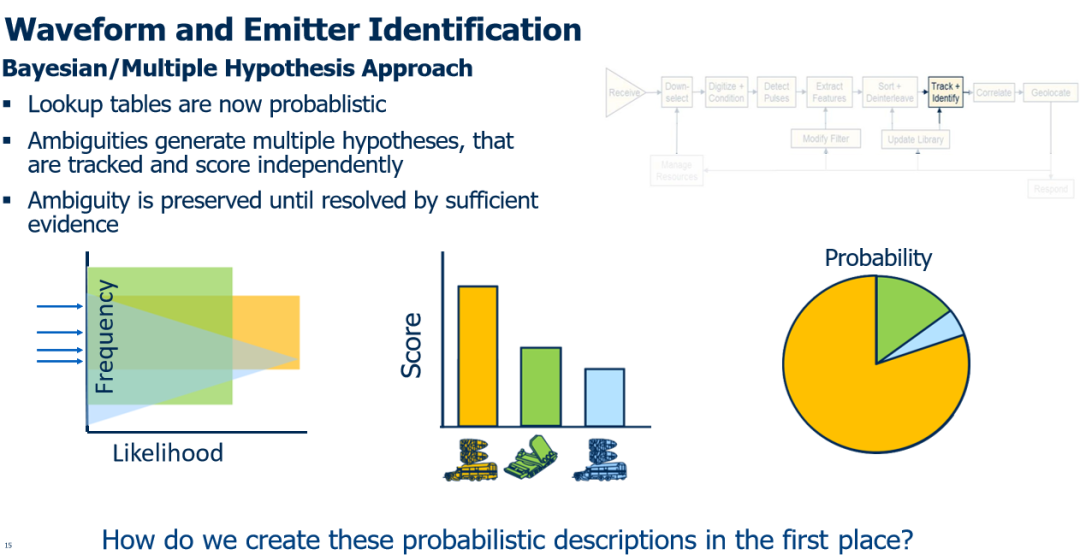
波形和辐射源识别。
贝叶斯/多重假设方法
以概率的形式查找
不确定性导致多种假设,这些假设是 独立跟踪和评价的;
不确定性被保留,直到有足够的证据解决。
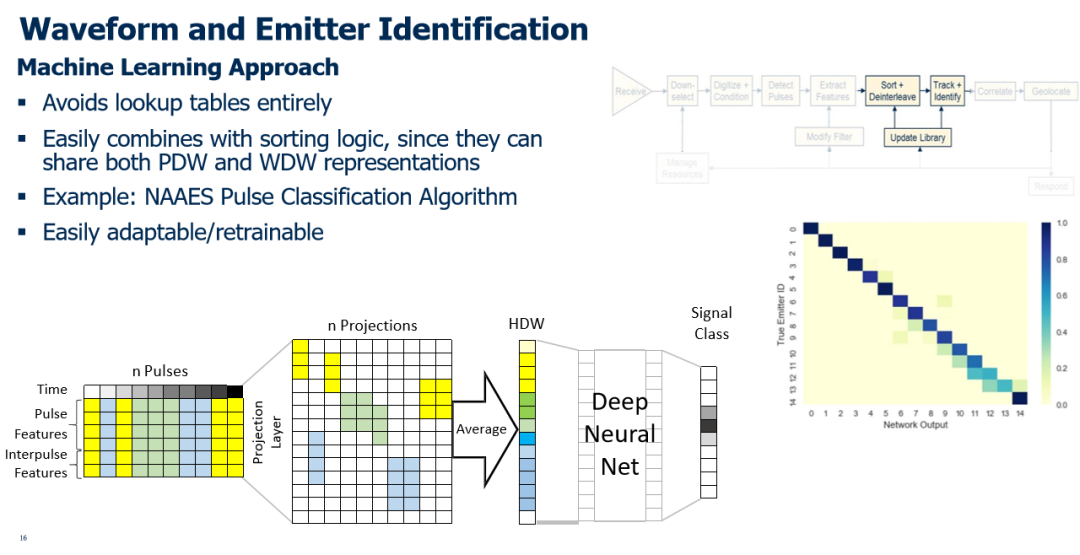
机器学习的方法。
完全不需要查找表;
轻松结合分选逻辑,因为可以共享PDW和WDW描述;
易于适应和可重复训练
实例:NAAES脉冲分选算法。
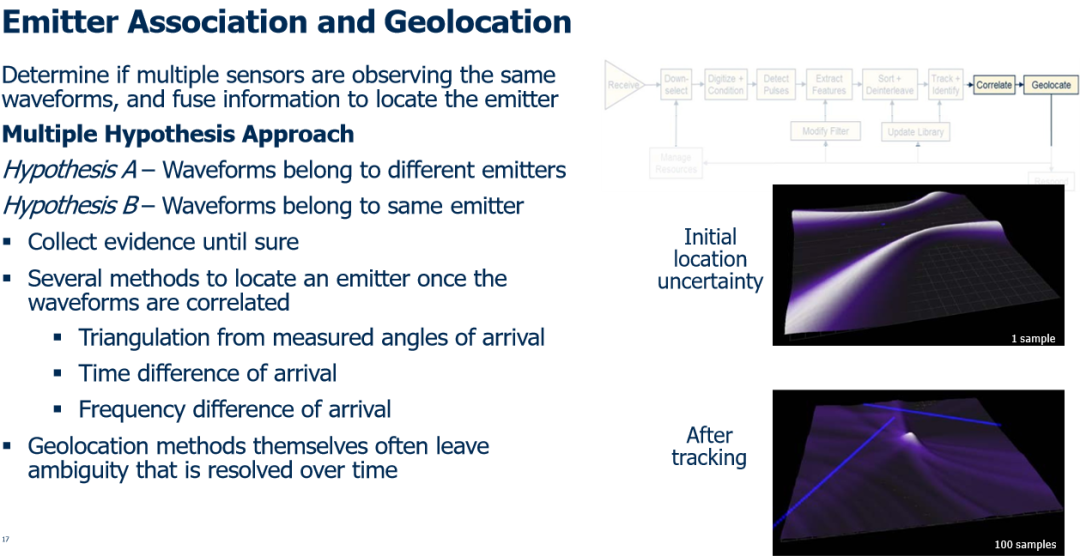
辐射源关联和定位
确定多个传感器是否观察到相同的波形,并融合信息来定位。
多重假设方法:
假设A波形属于不同辐射源
假设B波形属于同一辐射源
收集证据,直到确定
一旦波形相关,可以采用基于到达角估计的三角定位、时差定位和频差定位。
定位方法通常会随着时间的推移解决不确定性。
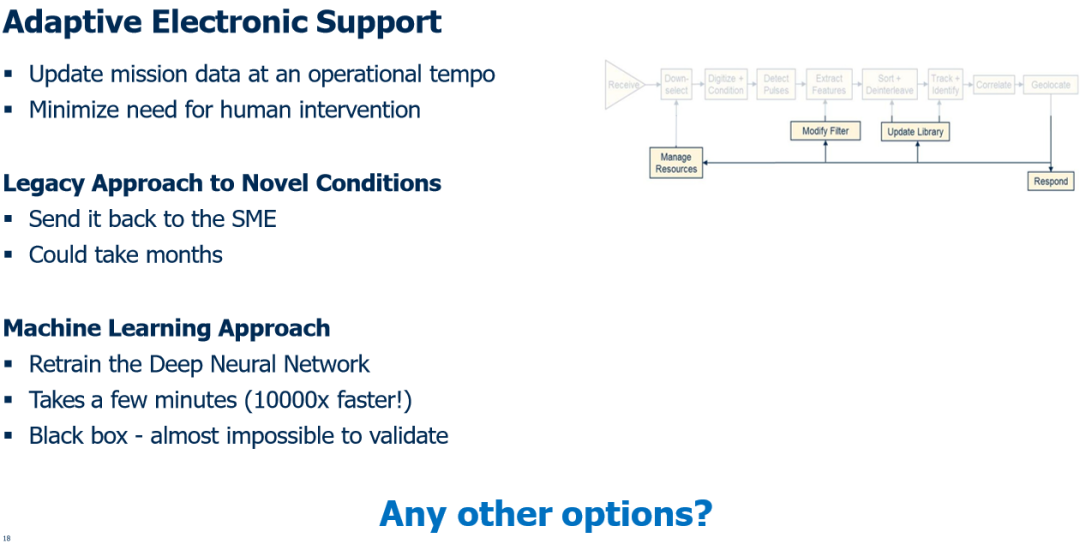
自适应电子支援
以行动节奏更新任务数据;
最小化人工干预需求
新条件下的传统方法
机器学习的方法。
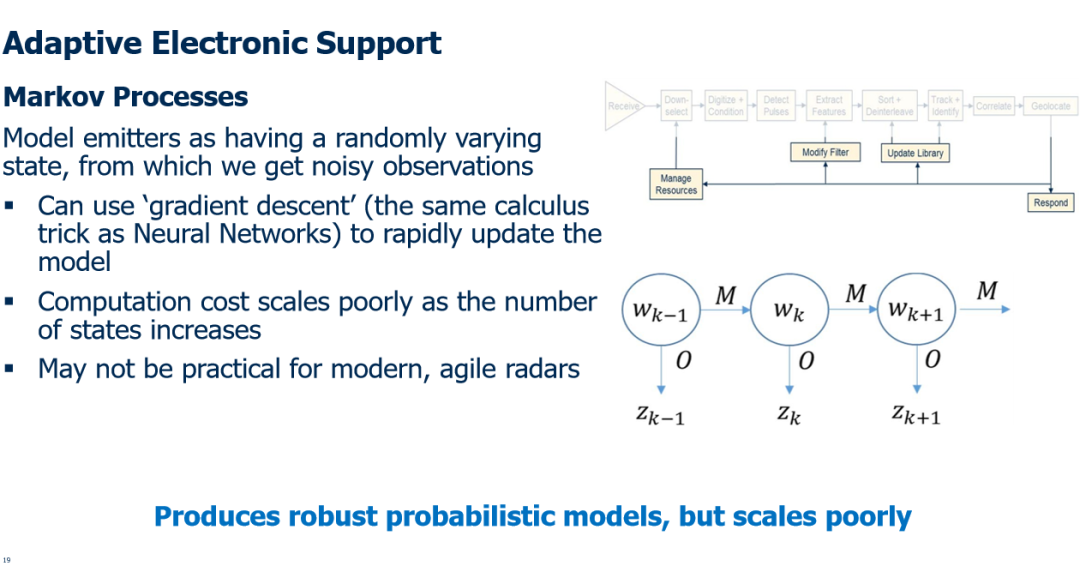
马尔科夫过程
辐射源模型具有随机变化的状态,从中可以观察到噪声。
可以使用“梯度下降法”来快速更新模型;
计算开销随着状态数量的增加而增加;
对现代捷变频雷达可能不适用。
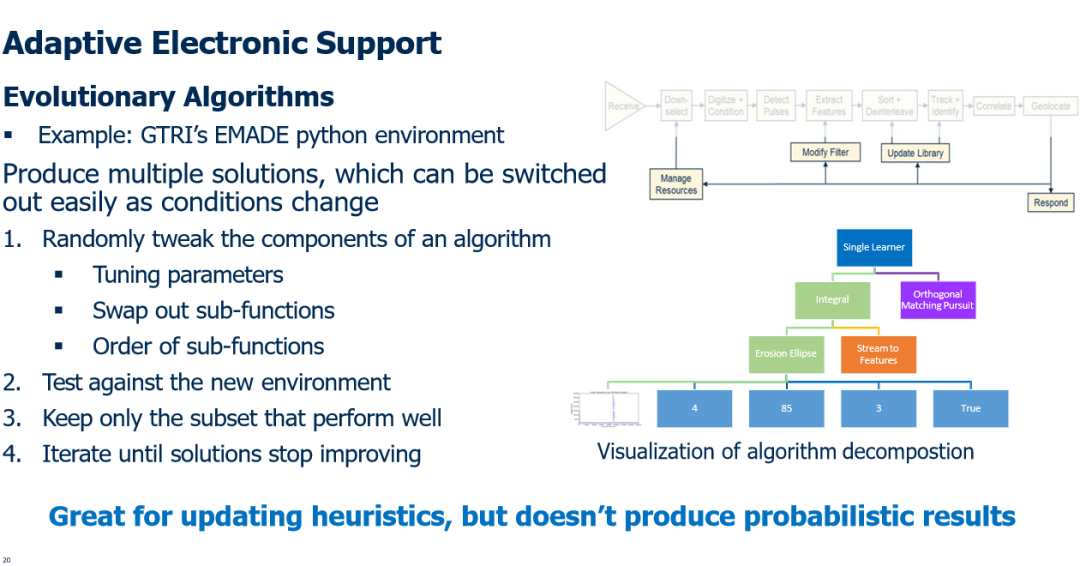
进化算法
随着条件的变化,有多种解决方案,并且可以灵活切换。
1.随机调整算法的组成部分
调整参数
Swap输出子函数
子函数的顺序
2.针对新关键进行测试
3.只保留表现良好的子集
4.迭代直到收敛。
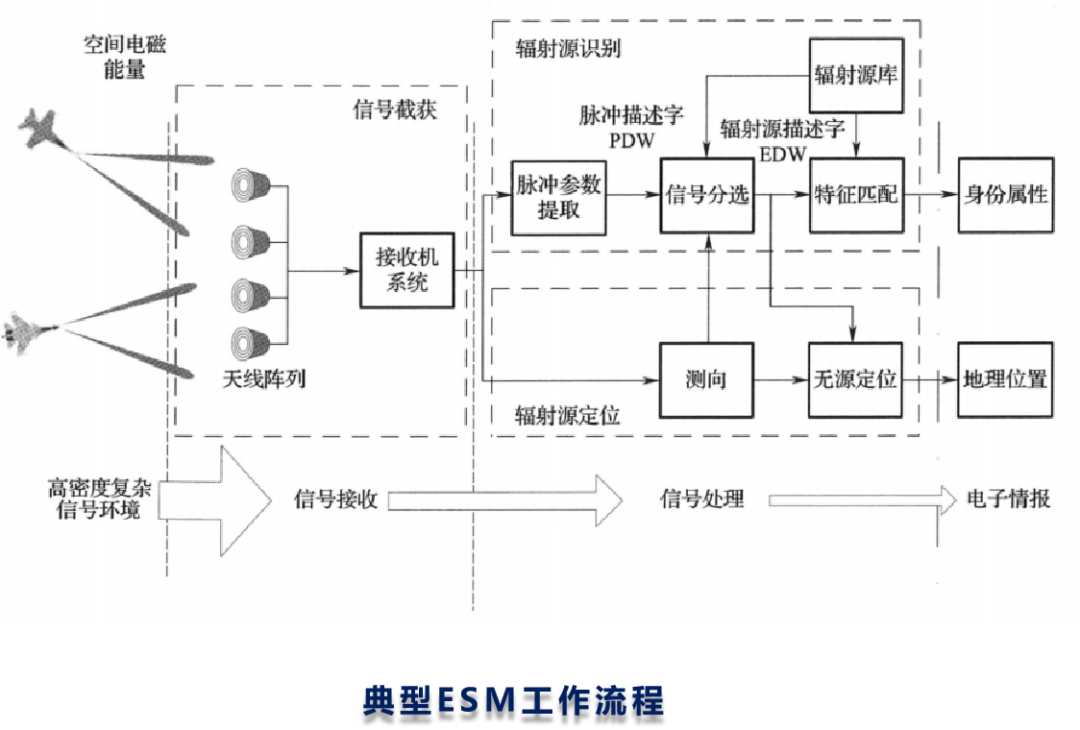
电子侦察目的是截获、探测、识别和定位射频威胁
软件定义的雷达强调传统的实现方法
需要灵活性更高和适应性更强的算法及时处理新波形
算法能够被解释一获得操作者的信任
没有奇迹-一个认知电子侦察系统将结合各种技术,并根据具体的任务满足需求。
课件下载链接:
链接:https://pan.baidu.com/s/1jz9g2KHvcXfq0RBuvb62Mw
提取码:31kd
背景知识

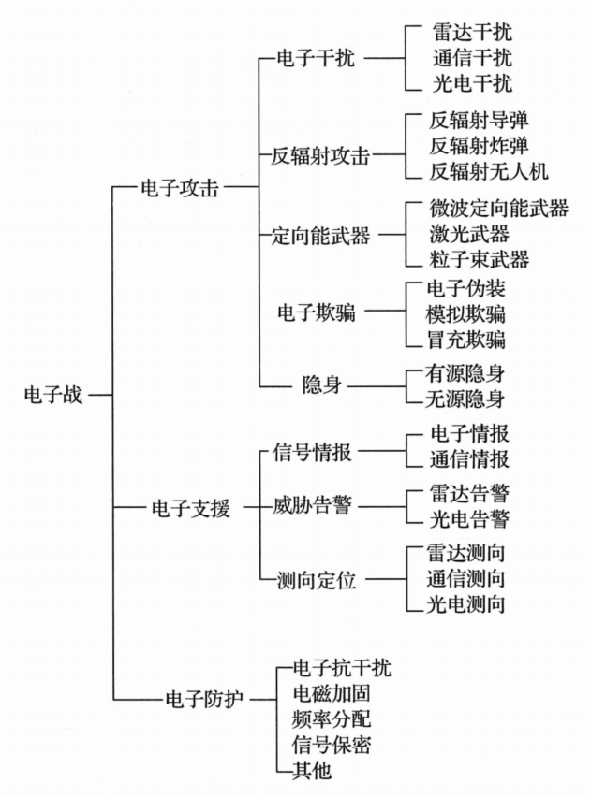
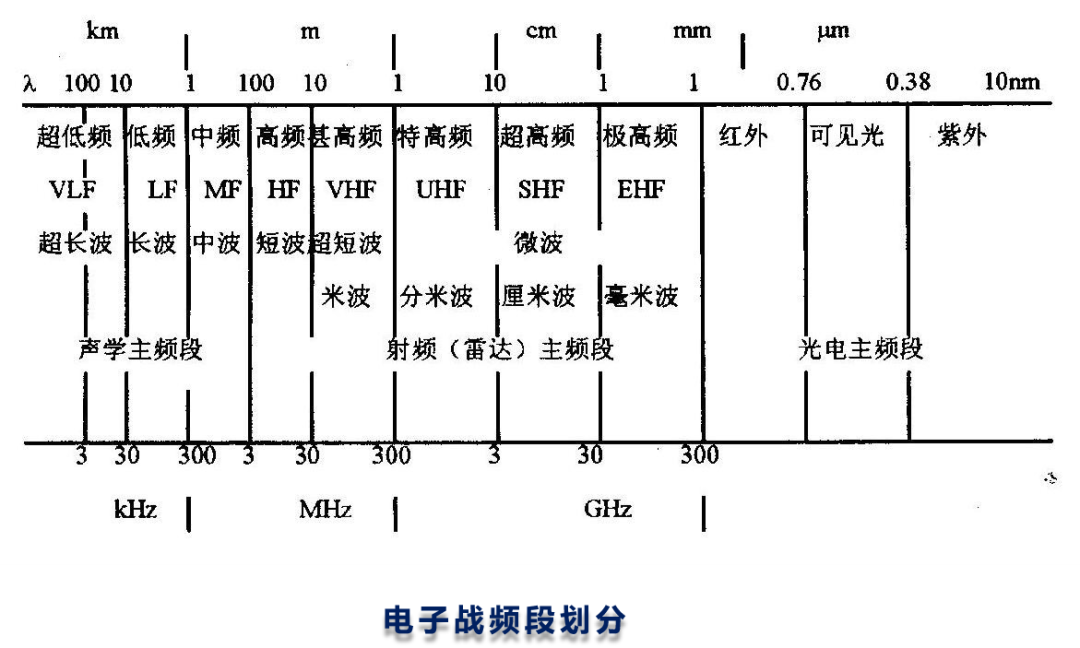
电子战的技术分支很多,通常按照具体的无线电电 子设备或器材进行分类,如:通信对抗与反对抗、雷达对 抗与反对抗、光电对抗与反对抗、引信对抗与反对 抗、敌我识别系统的对抗与反对抗、C3I(通信、指 挥、控制和情报)系统的对抗与反对抗等。从频域上 分为:射频对抗、光电对抗和声学对抗。

1.射频对抗
射频对抗的频率范围为3MHz~300GHz,是雷达、 通信、导航、敌我识别、无线电引信、制导等设备工 作的主要频段。
光电对抗
光电对抗的频率范围在300GHz以上,可分为红外、 可见光和激光等子频段,是近距离精确制导武器和高定 向能武器工作的主要频段。
声学对抗
声学对抗主要用于水下信息的对抗。从次声波至超 声波,是声纳、水下导航定位设备工作的主要频段。
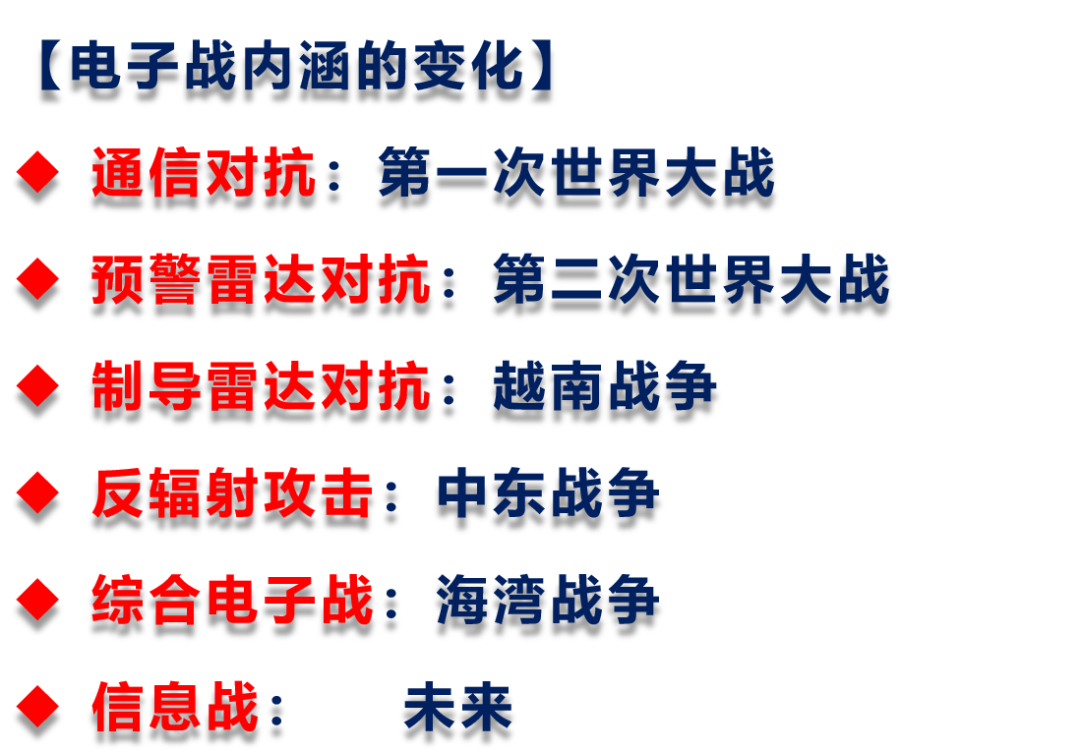
自从19世纪后期人类开始将电磁波运用于军事,针对敌方电磁波的斗争就开始了。
最早的电子战是**。19世纪60年代的普奥战争,普鲁士开始用电报传递军事信息(那时候还是有线电报),针对有线电报的**就开始了。马可尼发明无线电报后,军用信息传播更方便,而敌对方针对性的**也更加广泛。
20世纪初,雷达逐渐发明,通过发射电磁波,并接受反射波来确定敌方目标。于是,针对雷达电磁波的电子战展开了。一是捕获对方雷达波,定位对方雷达的信息,进而掌握对方部队的信息;二是通过在对方雷达波范围内制造一些假目标,欺骗对方雷达。
是1944年的欧洲战场。当时,盟军计划在诺曼底发动登陆,为了迷惑德军,伪造了准备在加来登陆的情报。同时,盟军在加来地区布置了大批假的船舶,还在空中洒下大量的金属箔。这些金属箔反射德军的雷达波,在雷达屏幕上制造了“庞大机群”的假想,使得希特勒深信盟军确实要在加来登陆。甚至当盟军先锋已经登陆诺曼底,希特勒还以为诺曼底的只是佯攻。因为加来的“无源电子干扰战”打得太出色了。
1945年7月,美军将刚刚研发出的电子干扰设备装在 “过渡型豪猪”飞机上,每架飞机携带6部干扰设备。干扰机飞到目标地区,在高炮射不到的高空释放干扰,造成日本的高炮失去目标指示。美军轰炸机的损失大大降低。
1982年,以色列空袭叙利亚贝卡谷地的导弹基地。他们首先派出了遥控无人机作为诱饵,引导叙利亚导弹基地配属的雷达开机,并用导弹攻击。瞬间,以色列的无人机被叙利亚导弹全部击落。但就在此时,以色列的E-2C型“鹰眼”预警与战斗控制飞机捕捉到了叙利亚的雷达电磁波信号,并将信号频率传送给以色列战斗机部队。正当叙利亚防空部队为击落以色列“战机”欢呼的时候,以色列真正的空军部队从背后杀来,发动狂轰滥炸。叙利亚雷达开机引导导弹发射,却被已经掌握其雷达频率的以色列飞机用激光制导导弹摧毁。6分钟后,叙利亚的19个萨姆一6导弹连全部被消灭。
随着军事科技的不断发展,电子化、信息化、数据化成为军队不断更新换代的驱使,电磁波的应用越来越广泛。基于GPS的定位,基于卫星和飞机的战场侦查,基于无线电信号建立的战场指挥网络和无人兵器遥控,以及C4I的综合作战系统,使得当代和未来的战场充斥着电磁信号。而电子战的手段也因此更加丰富。
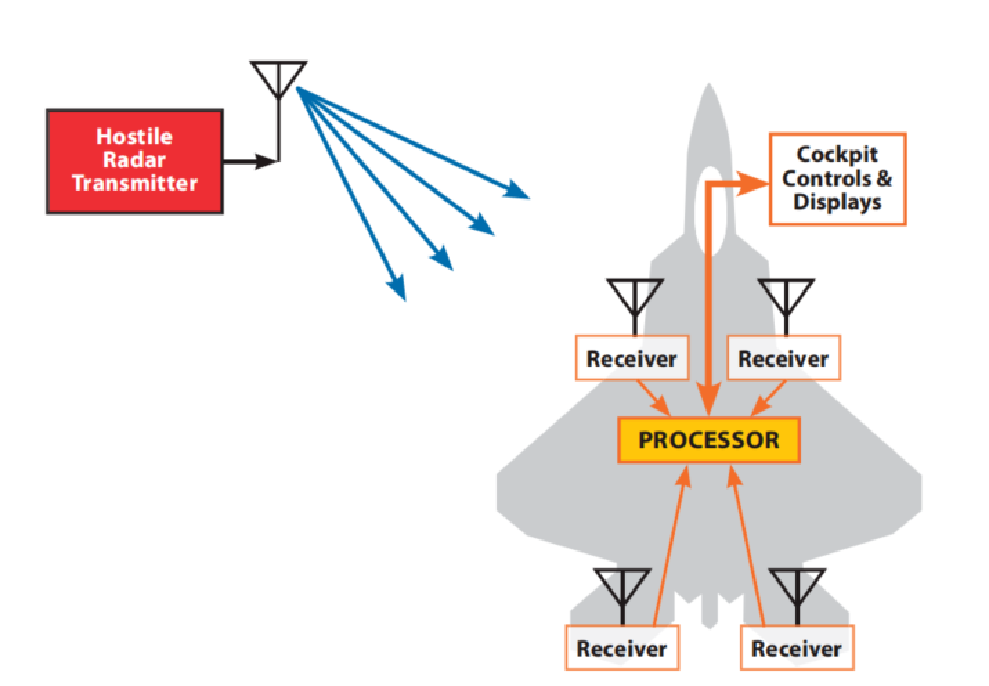
目前,先进的 ESM 接收机频率范围一般为 0.5~18GHz,能覆盖绝大部分现役雷达的工作频段,灵敏度大都在-50~-80dBm。在接收机的动态范围内每秒钟可接收 25~100万个脉冲信号,前端截获概率达到 50%时,其截获时间为1.5~3s。测向定位系统可提供的最优雷达测向精度为2°(均方根值)。
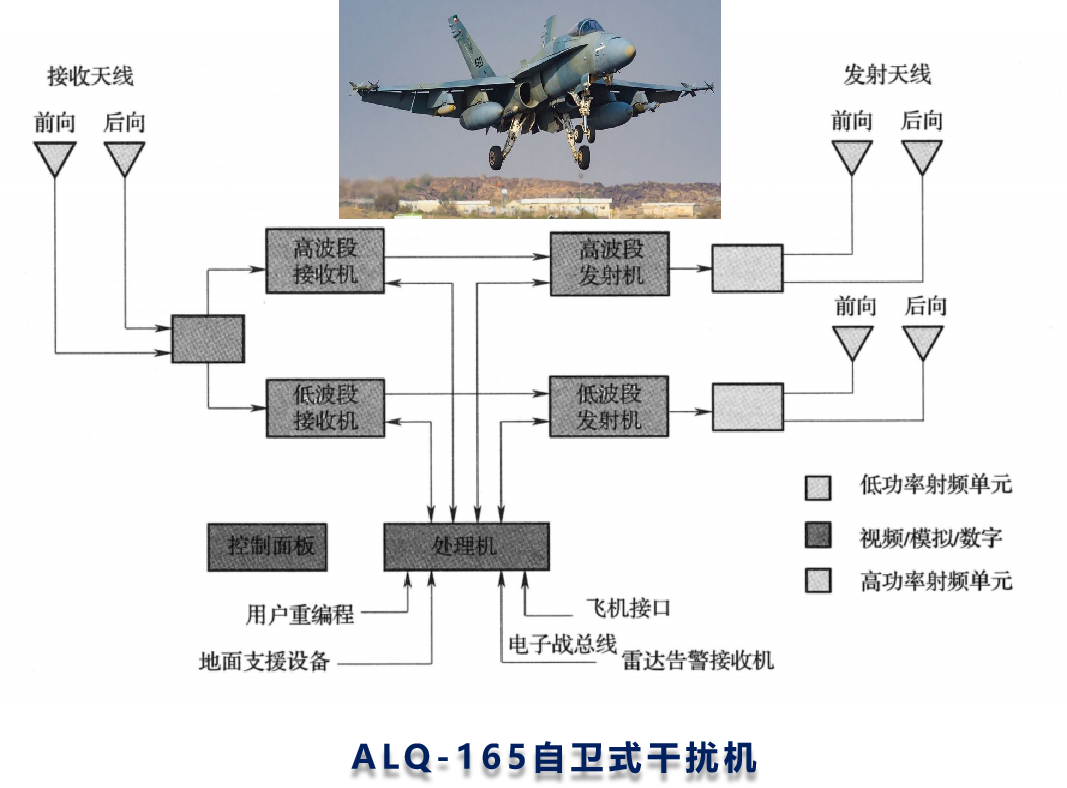
ALQ- 165 配装F-18C/D、AV-8B、F-16A 和F-14D 等机型。ALQ-165的典型参数见表12-2。通常,自卫干扰机只在前后向提供±60°范围的保护,因为该电子攻击系统不能产生足够的 ERP 来覆盖平台侧面的雷达截面积(RCS)。其频率范围包括两个频段,因为能覆盖整个频段的具有足够功率的行波管还未问世。处理器能同时处理多个脉冲和连续波(CW)威胁。对付连续波威胁要求在每个频段单独另加一个行波管,因为现在采用的大多数行波管不能同时放大连续波信号和脉冲信号。

免责声明:本天驰航宇目前所载内容为本天驰航宇原创、网络转载或根据非密公开性信息资料编辑整理,相关内容仅供参考及学习交流使用。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请跟我们联系。我们致力于保护作者知识产权或作品版权,本天驰航宇所载内容的知识产权或作品版权归原作者所有。本天驰航宇拥有对此声明的最终解释权 。


