如果不是这个逻辑分析仪,这将是一场畅快的SPI新体验

对比ST和新塘SPI外设,记录一场畅快的SPI开发新体验!
先看一下ST和新塘的SPI外设对比
此次对比的均为M0内核主频48M,此处不考虑超频。MCU为ST的STM32F031,新塘的是M031。
STM32F031:

新塘M031:

通过对比可以看出,新塘的M031可以理解为在STM32F031基础上进行升级改造,总线时钟新塘M031在主机模式下可以达到24M,此时钟是MCU的PCLK二分频得来。STM32F031最大只支持18M的频率。传输的位长新塘可以在8-32自由配置,STM32F031为4-16位自由配置,可以看得出新塘在高位数传输时更好用,但是低于8位的场合还是ST更好。如果概括起来说,8-32位的广域自由配置还是要更好用。这也是我畅快的原因。
测试这两个芯片的SPI是因为我们的产品在使用SPI通信时发送的数据都是24位,在之前使用STM32F031时只能通过将24位数据拆分为三个8位数据依次发送。此操作容易造成SPI时钟不连续,或者发8位的数据,却产生16和时钟信号,造成数据发送错误或者时间过长。具体解决方案我在GD32E230的SPI帖子里有介绍过,有遇到这个问题的可以跳转查看。GD32E230SPI+DMA
现在转了新塘的平台,8-32位的自由配置位长可就帮了大忙。我的24位数据便可一次性全送出。
代码对比:
在STM32F031中配置SPI为8位字长:
/************************************************函数名称 :SPI_GPIO_Configuration功 能 :SPI GPIO初始化参 数 :无返 回 值 :无作 者 :Mico*************************************************/void SPI_GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;SPI_InitTypeDef SPI_InitStructure;/* 使能AHB时钟 */RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);/* 使能APB2时钟 */RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);/*定义 SPI复用引脚 */GPIO_InitStructure.GPIO_Pin = PIN_SPI_SCK | PIN_SPI_MISO | PIN_SPI_MOSI;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(PORT_SPI_SCK, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOB, GPIO_PinSource3, GPIO_AF_0);GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_0);GPIO_PinAFConfig(GPIOB, GPIO_PinSource5, GPIO_AF_0);/* 片选CS */GPIO_InitStructure.GPIO_Pin = PIN_SPI_CS;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //输出模式GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(PORT_SPI_CS, &GPIO_InitStructure);GPIO_ResetBits(GPIOB, GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5);//拉低片选/* SPI 初始化定义 */SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI设置为双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为主 SPISPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI发送接收 8 位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //时钟悬空低SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //数据捕获于第二个时钟沿SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //软件控制 NSS 信号SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //波特率预分频值为8SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从 MSB 位开始SPI_InitStructure.SPI_CRCPolynomial = 8; //定义了用于 CRC值计算的多项式SPI_Init(SPI1, &SPI_InitStructure);SPI_RxFIFOThresholdConfig(SPI1, SPI_RxFIFOThreshold_QF); //区别于STM32F103SPI_Cmd(SPI1, ENABLE);}
因为SPI是收发一体,所以在需要发送24位数据时SPI使用该函数进行三次收发,代码显得十分臃肿。
/************************************************函数名称 :SPI_WriteReadByte功 能 :对SPI写读字节数据参 数 :无返 回 值 :32位角度值作 者 :Mico*************************************************//***************************************************DR寄存器是16位的,如果你直接SPI1->DR = 0x9F ;这样的操作是不正确的,你的数据会变成0x009F之后赋值给DR寄存器,也就是操作了16位,所以STM32会输出16个时钟脉冲我们先找到DR寄存器的地址,再用一个八位的指针指向这个地址,现在指向的是DR寄存器的开头,那么指针+1,指针指向了DR寄存器的低八位这时候给指针指向的地址赋值0x85,那么这个字节就会放入DR低八位的空间内,而不是操作整个16位DR寄存器***************************************************/uint32_t SPI_WriteRead(void){uint16_t num1,num2,num3;uint32_t AngelData;GPIO_ResetBits(GPIOA, GPIO_Pin_15);//拉低片选*((uint8_t*)&(SPI1->DR) + 1 ) = 0x50;num1 = SPI1->DR;while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == RESET);*((uint8_t*)&(SPI1->DR) + 1 ) = 0x35;num2 = SPI1->DR;while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == RESET);*((uint8_t*)&(SPI1->DR) + 1 ) = 0x0F;num3 = SPI1->DR;while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE) == RESET);while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY) == RESET);GPIO_SetBits(GPIOA, GPIO_Pin_15);//拉高片选AngelData = ((num2&0xFF)<<16 |(num3&0xFF)<<8 | (num1&0xFF));return AngelData ;}
新塘M031 SPI代码:
因为新塘时钟的初始化是写在一个函数中的,我沿用了这个习惯,初始化系统以及各个外设时钟,这个必不可少。
void SYS_Init(void){/*---------------------------------------------------------------------------------------------------------*//* Init System Clock *//*---------------------------------------------------------------------------------------------------------*//* Unlock protected registers */SYS_UnlockReg();/* Enable HIRC clock (Internal RC 48MHz) */CLK_EnableXtalRC(CLK_PWRCTL_HIRCEN_Msk);/* Wait for HIRC clock ready */CLK_WaitClockReady(CLK_STATUS_HIRCSTB_Msk);/* Select HCLK clock source as HIRC and HCLK source divider as 1 */CLK_SetHCLK(CLK_CLKSEL0_HCLKSEL_HIRC, CLK_CLKDIV0_HCLK(1));/* Set both PCLK0 and PCLK1 as HCLK */CLK->PCLKDIV = CLK_PCLKDIV_APB0DIV_DIV1 | CLK_PCLKDIV_APB1DIV_DIV1;/* Select IP clock source *//* Select UART0 clock source is HIRC */CLK_SetModuleClock(UART0_MODULE, CLK_CLKSEL1_UART0SEL_HIRC, CLK_CLKDIV0_UART0(1));/* Select UART1 clock source is HIRC */CLK_SetModuleClock(UART1_MODULE, CLK_CLKSEL1_UART1SEL_HIRC, CLK_CLKDIV0_UART1(1));/* Select PCLK1 as the clock source of SPI0 */CLK_SetModuleClock(SPI0_MODULE, CLK_CLKSEL2_SPI0SEL_PCLK1, MODULE_NoMsk);/* Enable UART0 peripheral clock */CLK_EnableModuleClock(UART0_MODULE);/* Enable UART1 peripheral clock */CLK_EnableModuleClock(UART1_MODULE);/* Enable PDMA module clock */CLK_EnableModuleClock(PDMA_MODULE);/* Enable SPI0 peripheral clock */CLK_EnableModuleClock(SPI0_MODULE);/* Update System Core Clock *//* User can use SystemCoreClockUpdate() to calculate PllClock, SystemCoreClock and CycylesPerUs automatically. */SystemCoreClockUpdate();/*---------------------------------------------------------------------------------------------------------*//* Init I/O Multi-function *//*---------------------------------------------------------------------------------------------------------*//* Set PB multi-function pins for UART0 RXD=PB.12 and TXD=PB.13 */SYS->GPB_MFPH = (SYS->GPB_MFPH & ~(SYS_GPB_MFPH_PB12MFP_Msk | SYS_GPB_MFPH_PB13MFP_Msk)) | \(SYS_GPB_MFPH_PB12MFP_UART0_RXD | SYS_GPB_MFPH_PB13MFP_UART0_TXD);/* Set PB multi-function pins for UART1 RXD(PB.2) and TXD(PB.3) */SYS->GPB_MFPL = (SYS->GPB_MFPL & ~(SYS_GPB_MFPL_PB2MFP_Msk | SYS_GPB_MFPL_PB3MFP_Msk)) | \(SYS_GPB_MFPL_PB2MFP_UART1_RXD | SYS_GPB_MFPL_PB3MFP_UART1_TXD);/* Setup SPI0 multi-function pins *//* PA.3 is SPI0_SS, PA.2 is SPI0_CLK,PA.1 is SPI0_MISO, PA.0 is SPI0_MOSI*/SYS->GPA_MFPL = (SYS->GPA_MFPL & ~(SYS_GPA_MFPL_PA3MFP_Msk |SYS_GPA_MFPL_PA2MFP_Msk |SYS_GPA_MFPL_PA1MFP_Msk |SYS_GPA_MFPL_PA0MFP_Msk)) |(SYS_GPA_MFPL_PA3MFP_SPI0_SS |SYS_GPA_MFPL_PA2MFP_SPI0_CLK |SYS_GPA_MFPL_PA1MFP_SPI0_MISO |SYS_GPA_MFPL_PA0MFP_SPI0_MOSI);/* Lock protected registers */SYS_LockReg();}
超级简洁的SPI初始化:
void SPI_Init(void){SPI_Open(SPI0, SPI_MASTER, SPI_MODE_1, 24, 8000000);SPI_EnableAutoSS(SPI0, SPI_SS, SPI_SS_ACTIVE_LOW);}
此处将SPI0设置为主模式,24位字长和8M的速度。
在主函数中测试:
while(1){SPI_SET_DATA_WIDTH(SPI0,24);/* Write to TX register */SPI_WRITE_TX(SPI0, 0x50650F);/* Check SPI0 busy status */while(SPI_IS_BUSY(SPI0));SPI_SET_DATA_WIDTH(SPI0,32);/* Write to TX register */SPI_WRITE_TX(SPI0, 0x50650F55);/* Check SPI0 busy status */while(SPI_IS_BUSY(SPI0));}
首先将发送的字长设定为24位,然后输出,完成后将输出字长改为32,再次输出。在这里我遇到了麻烦事,输出的数据根本对不上,在使用逻辑分析仪查看数据如下:
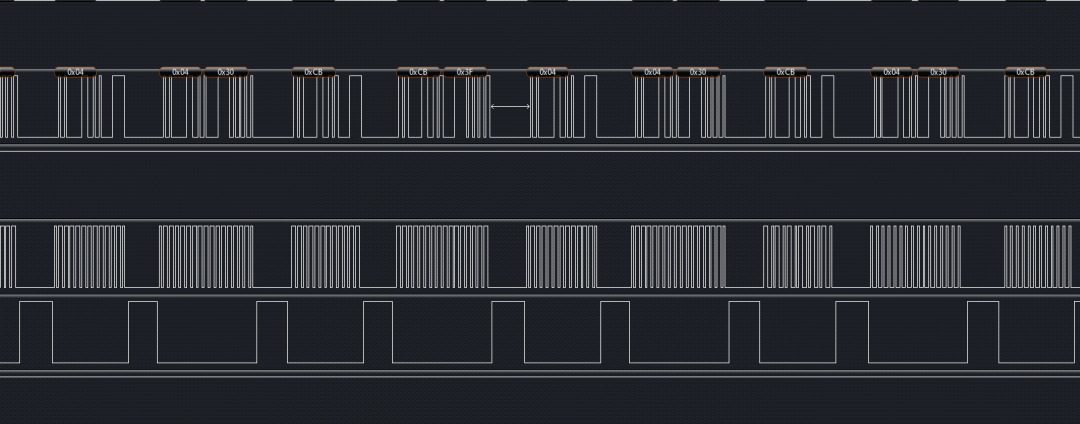
无论是数据还是时钟均对不上,然后将时钟降低到2M,输出如下:

可以很明显的看到数据完全正确,时钟连续性很好,我怀疑是SPI的时钟线配置有问题,可能是主频分频过来的的时钟太低,达不到8M,但是在时钟配置中检查不到任何问题,于是在这里转圈圈,折腾了好久,后来想到去年在调试STM32F031的SPI时也遇到莫名其妙的问题,当时发现是逻辑分析仪的最大速度只有2M,高于2M显示就不准确。
果然,在2M和8M的频率下接上示波器,观察两个波形其实是相同的
2M

8M

问题分析:[size=14.6667px]逻辑分析仪只能抓取分析波形好的逻辑,在高速情况下,加上逻辑分析仪的线较长,可能导致波形变差,导致逻辑分析仪无法抓取全部波形。另外一个就是速度太快,逻辑分析仪的响应速度达不到那么高。
[size=14.6667px]同一个坑,踩了两次,真的有够烦人的,以后一定要记住逻辑分析仪遇到问题考虑一下示波器?
[size=14.6667px]
关于SPI的DMA
[size=14.6667px]无论是STM32还是新塘,在仅仅操作SPI的时候可以在MCU允许的情况下进行自由字节数的收发,但是我们很多时候都需要使用DMA来搬运数据,以此减小CPU的工作量。这里我们看一下DMA的描述:

DMA的单次传输字节数并不是很自由,只有8位,16位和32位三种模式。比如我发送24位数据,DMA数据宽度得设置为32位,即使我的SPI定义为24位的宽度,实际DMA还是会产生32个时钟信号,最高位会填充0。所以当使用DMA通信时,还是得将SPI设置为8位宽度,DMA设置为8位,将24位数据分为3个8位送出。
end


