AUTOSAR的基本概念(二)

3AUTOSAR的实时环境RTE,Run Time Environment实时运行环境,是整个AUTOSAR架构运行的桥梁,各个模块SWC之间的通信不是直接交互的,而是经过该层作为运行的基础,RTE里包含着OS大量的运行策略和服务。RTE也是VFB(Virtual Functional Bus)的实现。
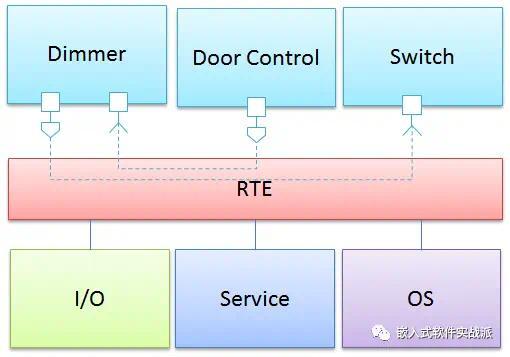
§ RTE需要配置(e.g. 把runnables对应到OS的tasks中去)
§ 通过RTE的事件触发runnables的运行
§ 生成调用runnables的task代码
§ 配置OS的一部分 (tasks, events, alarms)
§ 实现SWC之间的通信
§ 每个ECU的RTE因SWC的需求而异
§ RTE抽象了OS,防止SWC直接访问OS和BSW
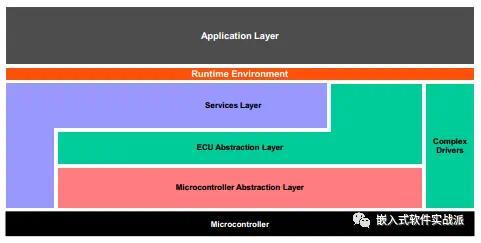
4AUTOSAR的基础软件
基础软件,即BSW。从AUTOSAR架构看,中间一层,都是BSW。

细化后
再细化
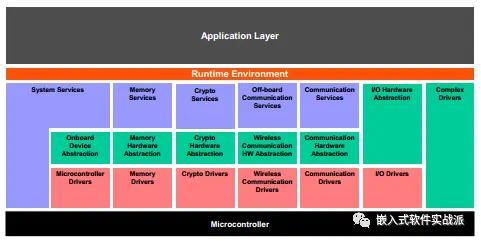
可以看出,其内容非常丰富,严格遵循着AUTOSAR的各项标准。
BSW抽象程度比较高,包含着许多基础软件。
从图上可以看出,其分了很多类,对应不同的功能。例如Memory、Communication、System等等。
特别一提的是,Complex Driver,是应对比较复杂的驱动的,这个在AUTOSAR的标准上是没有很明确的定义的,可由用户去实现。
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2022-07-26
最近编辑:2年前

汽车声,划破天际。

相关推荐
最新文章
