结构有限元分析中的时域瞬态法

本文摘要(由AI生成):
文章概述了结构动力学中复合阻尼的定义及其在有限元分析中的挑战,特别是当涉及多种材料时。阻尼算法和参数仅近似模拟结构能量吸收特性,确定阻尼数据往往困难,可能依赖于实验或经验。在瞬态结构问题中,时间求解器分为显式和隐式两类,各有优缺点。自动时间步长优化求解效率。瞬态分析支持速度和加速度边界条件,并需设置初始条件。文章还简要介绍了结构瞬态分析在有限元软件中的实现步骤,包括模型建立、网格划分、载荷步与时间步设置、边界条件设置以及结果计算与验证。
瞬态结构动力学分析(又称时间历程分析)是用于确定结构随时间变化的动力学响应的一种方法。通过瞬态动力学分析,我们可以确定结构在稳态载荷、瞬态载荷、和简谐载荷的随意组合作用下的随时间变化的位移、应变、应力及力。瞬态分析最大的优点就是考虑了惯性力和阻尼作用。
瞬态问题常见的分析方法有:
时域瞬态分析
特征值提取(自然频率和模态)
稳态响应(频域的谐响应分析)
响应谱分析(冲击的峰值响应计算)
随机响应分析(由随机激励引起的振动)
由于时域瞬态方法最为直观,适应各种线性、非线性的工况,使用率高。本文只介绍时域瞬态法。其他方法将会在以后的文章中介绍。
控制方程
瞬态动力学的基本运动方程是:

其中:[M]是质量矩阵。[C]是阻尼矩阵。[K]是刚度矩阵。{u_tt}是节点加速度。{u_t}是节点速度。{u}是节点位移。{F}是载荷。可以看出结构瞬态方程是一个含有二阶时间导数的方程。求解二阶时间导数的方法很多,结构有限元中使用最为广泛的是Newmark隐式时间积分法。WELSIM默认的结构时间求解器也是Newmark法。
常见求解方法
瞬态动力学有常见三种有限元求解方法:完全法、缩减法及模态叠加法。
完全法采用完整的系统矩阵计算瞬态响应。它是功能最强的,支持求解各类非线性特性(塑性、大变形、大应变等)。优点是:容易使用,不必关心选择主自由度或振型。允许各种类型的非线性特性。采用完整矩阵,不涉及质量矩阵近似。一次分析就能得到所有时间历程下的位移和应力。允许所有类型的边界条件。完全法的主要缺点是开销大,费时,计算所得数据大。
缩减法通过采用主自由度及缩减矩阵压缩数据规模。在主自由度处的位移被计算出来后,将解扩展到完整自由度集上。优点是:比完全法快且开销小。缺点是:初始解只计算主自由度的位移。只能施加节点边界条件。所有载荷必须加在用户定义的主自由度上。时间步长必须恒定,不支持自动时间步长。不支持非线性(点对点接触除外)。
模态叠加法通过对模态分析得到的振型(特征值)乘上因子并求和来计算结构的响应。优点是:比缩减法或完全法更快、开销更小。允许考虑模态阻尼(阻尼比作为振型号的函数)。缺点是:时间步长必须恒定,不支持自动时间步长。不支持非线性(点对点接触除外)。不能施加非零位移边界条件。
由于完全法的优越性,及其在非线性问题的广泛应用。本文只介绍完全法。
阻尼(Damping)
考虑阻尼的作用是瞬态分析优点之一。阻尼可以看做是一种能量的耗散,它来自于诸多因素,而有限元分析中,时常将阻尼看做是一种综合作用,而从数值角度施加阻尼。

有限元中常见的阻尼设置有三种:直接阻尼(direct damping),Rayleigh阻尼(Rayleigh damping)和复合阻尼(composite damping)。直接阻尼可以定义与每阶模态相关的临界阻尼比,其典型的取值范围是在临界阻尼的1%到10%之间。Rayleigh阻尼假设阻尼矩阵是质量和刚度矩阵的线性组合。尽管阻尼是正比于质量和刚度矩阵的假设没有严格的物理基础,实际上我们对于阻尼的分布知之甚少,而实践证明Rayleigh阻尼在有限元法中是有效的,并被广泛应用。复合阻尼可以根据每种材料定义一个临界阻尼比,这样就得到了对应于整体结构的复合阻尼值。当结构中有多种不同的材料时,复合阻尼更为有效。
在大多数线性动力学问题中,准确地定义阻尼对于结果十分重要。但是,阻尼算法和参数只是近似地模拟了结构吸收能量的特性,并非从原理上模拟引起这种效果的物理机制。因此,有限元分析中确定阻尼数据是很困难的。有时我们可以从试验中获得这些数据,有时必须要通过查阅参考资料或者经验来确定阻尼参数。
时间求解器
瞬态结构问题,由于二阶时间导数的引入,我们需要能求解时间导数的时间求解器。我们一般将此求解器分为两大类:显示求解器,和隐式求解器。

显式求解器用上一步的结果和当前步的结果计算下一步的计算结果。显示求解器有不稳定区域,需要很小的时间步长。好处是可以不需要非线性求解器(牛顿迭代求解器)来求解非线性特征,也不需要组装刚度矩阵。同时编码和算法相对简单,不需要额外的内存来存储额外中间数据。显示求解器的稳定步长可以估算得出,但是由于实际计算的复杂性,会设置的比理论步长还要小一些。显式算法要求质量矩阵为对角矩阵,而且只有在单元级计算尽可能少时速度优势才能发挥, 因而往往采用减缩积分方法,容易激发沙漏模式,影响应力和应变的计算精度。显示求解器的代表算法有中心差分法,Euler向前差分法,Runge-Kutta,线加速度法等。
隐式求解器用当前步结果和下一步未知结果反复迭代下一步结果,必须通过迭代得到。隐式求解需要组建刚度矩阵,需要牛顿迭代求解非线性问题。常用方法有Newmark法和Wilson-Theta法,其变种算法可以通过修改算法中的alpha、beta和theta参数来实现,如HHT算法在一些问题上的计算效率和精确度有显著提高。隐式求解法的最大优点是它具有无条件稳定性,即时间步长可以任意大。但是实际运算中上要受到迭代次数及非线性程度的限制,需要取一个合理值。同时如Newmark等算法具有二阶精度。
显示和隐式算法的比较如图所示

为了确保得到结构的全部反应并保证解的稳定性和收敛,选择正确的时间步长是很重要的。一般说来,时间步越短,解越精确。然而时间步越小,求解步数就越多,运行时间将显著增加。因此,求解所需要的时间将限制步长不可能太小。同时,时间步不能太大,否则计算容易漏掉结构的很多高阶频率,从而导致所得到的解不真实。
自动时间步长是一种能够优化瞬态求解效率的自动化算法,用户只需要设置初始步长和步长的最大最小值,在求解过程中,求解器将根据需要自动减小时间步,以解析解中的任何快速变化。在结果变化较小的过程中,求解器能增大时间步,从而提高计算效率。
边界条件和初始条件
和静力分析不一样的是,由于瞬态和惯性的特征。瞬态分析支持速度和加速度边界条件。这些边界条件,尤其是加速度可以用来模拟激振的效果。
对于初始条件,瞬态分析一般会支持一下三种:
线性静力结果。它指定了结构在某种静荷载作用下的初始位移。
一个瞬态分析结果,它确定了结构在某时刻的瞬态反应。求解可以从任何指定的时间步开始。
结构中所有自由节点的初始速度和初始加速度。
初始速度条件是比较常见的初始条件,它常以体条件施加在某个结构体的所有节点上。
以上是结构时域瞬态分析中的核心知识。下面我们来看如何在有限元软件中如何来实现计算和分析。
结构瞬态分析步骤
1. 建立或导入模型

2. 网格划分
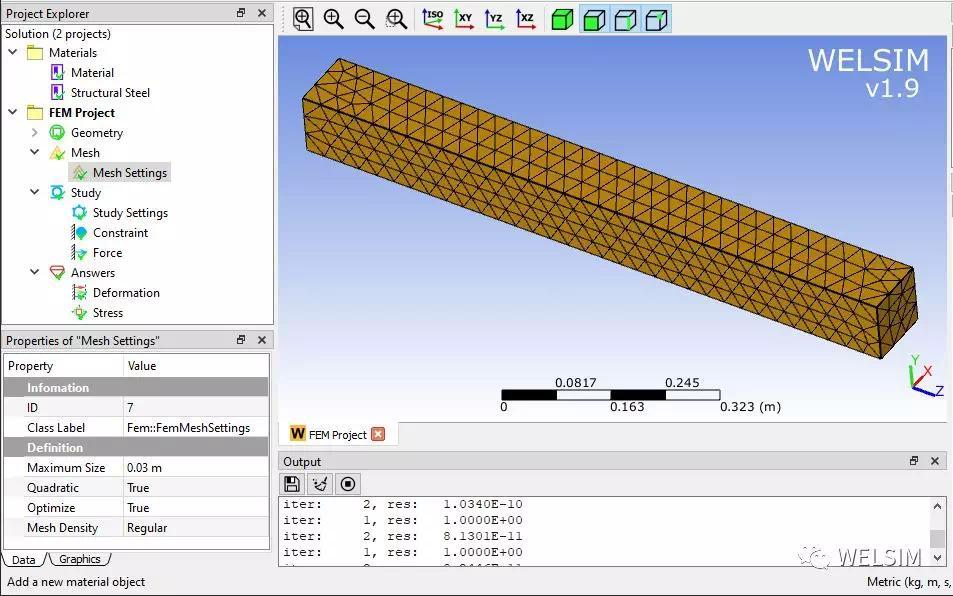
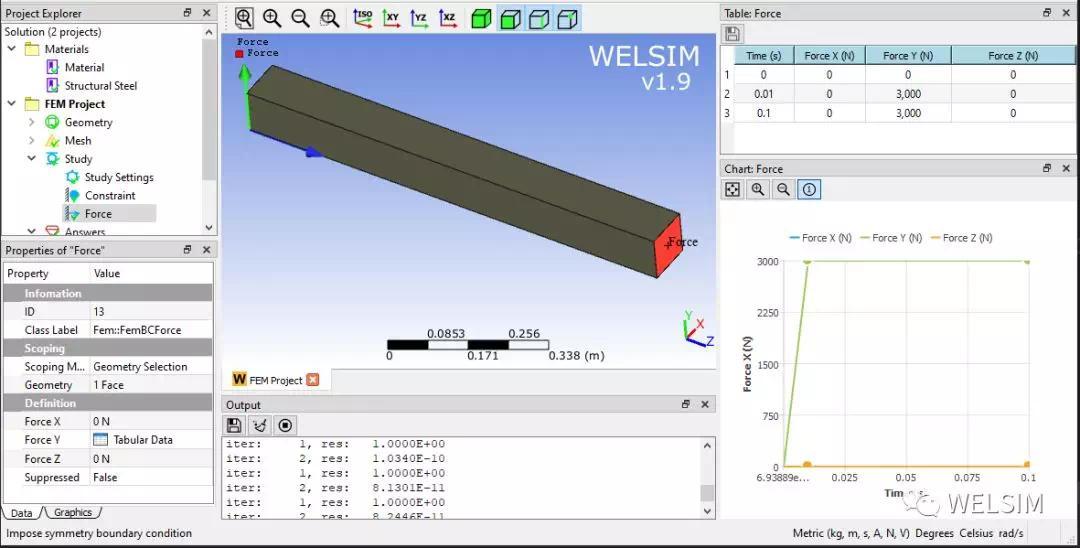
3. 载荷步与时间步设置

Number Of Steps:载荷步,表示分几步施加载荷。
Current Step:当前载荷步。
Current End Time:当前载荷步结束时间。
Auto Time Stepping:自动时间步长是否打开。WELSIM目前对结构分析只支持固定步长,所以关闭此选项。
Define By:定义载荷子步的方式。可以通过时间和载荷子步数来定义,用时间定义的意思是每一载荷子步经历的时间是多少,用载荷子步定义的意思是一个载荷步有多少个载荷子步。
Time Step:载荷子步的时间。
4. 设置边界条件,初始条件,接触等。
5. 计算并验证结果
下图显示Y方向变形和von-mises应力,已经在整个时间历程下的最大最小值。
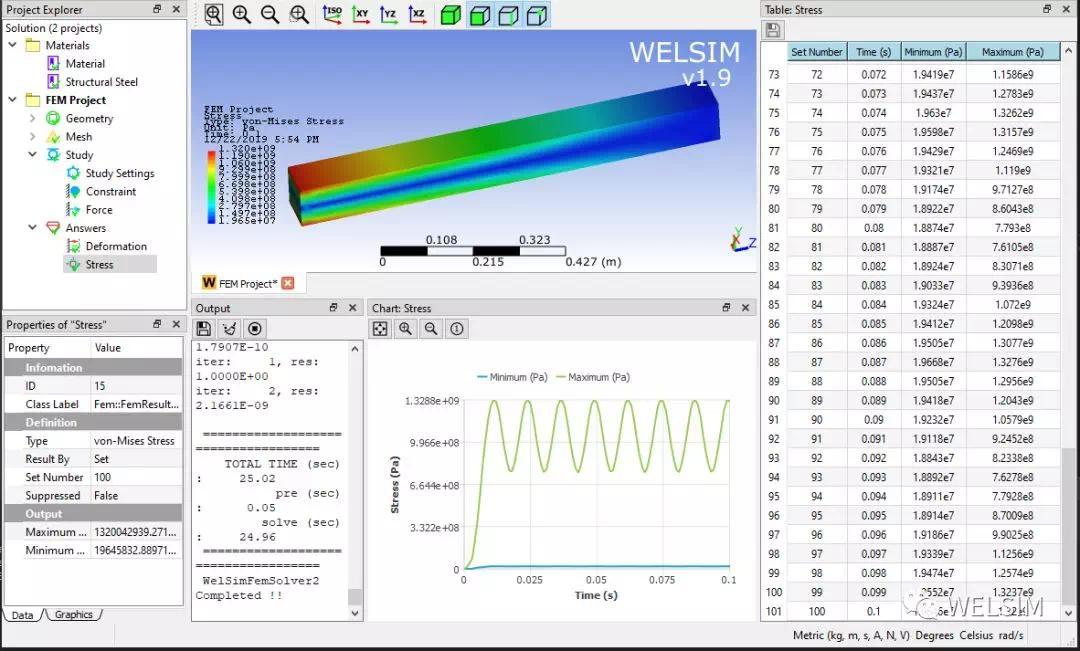

可以看出本分析中不含有阻尼,所以往复振动无衰减。关于阻尼的作用与设置,我们会在以后的文章中介绍。




