刚体动力学之机械臂运动


刚体动力学作为ANSYS中一个很方便的动力学模块,可以求解得出结构的一些运动参数,例如加速度、速度、位移、力变化等
刚体动力学模块中模型常为刚体,载荷施加形式常使用Joint运动副进行边界条件控制,也有使用接触的形式进行结构之间的关联,相对来说,使用Joint运动副求解的速度非常快,几乎秒出结果,提升了效率,Workbench中也常用刚体动力学的运动求解之后与静力学模块相关联,用来求解其中某个结构的静力学特性(变形、应力应变等)
01
模型导入

说明:此模型是我从网上下载的,可以推荐一个国外网站https://grabcad.com,可以免费下载模型。由于是刚体动力学,因此未对模型进行简化处理

02
进入Mechanical

注意:初始状态会自动生成接触,将所有的接触进行删除,因为本案例全程为Joint运动副驱动,无需使用接触进行控制
03
设置Joint旋转副



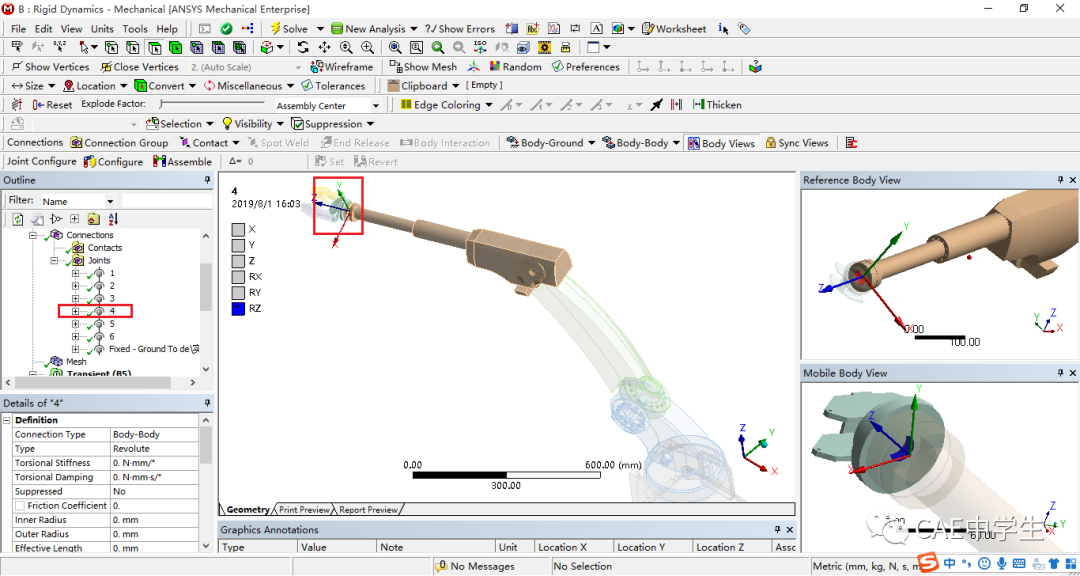

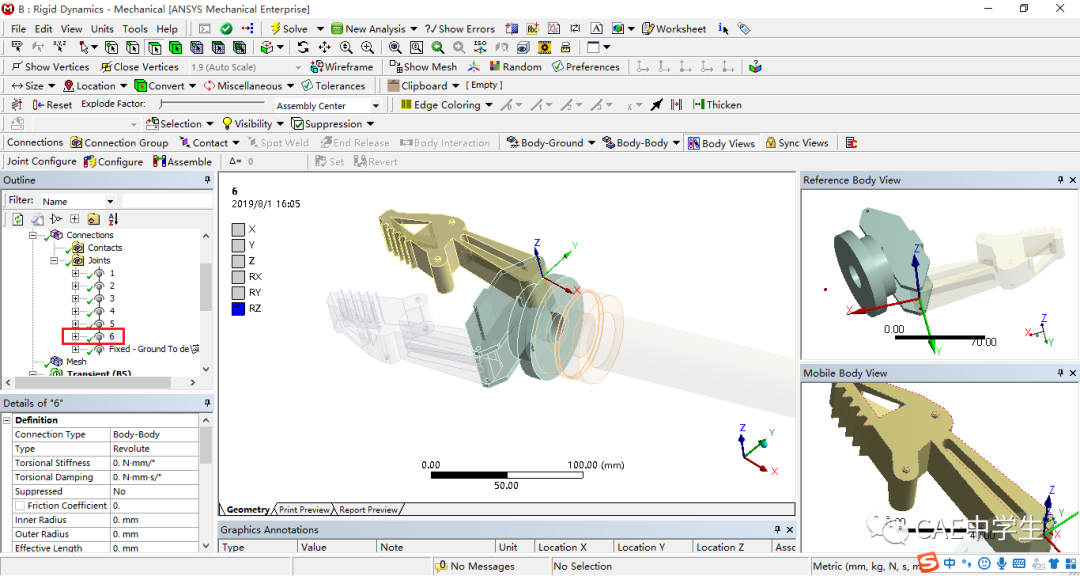

注意:每个关节都是使用旋转副进行连接约束,如果在实际模型中,可能还会用到平移副,例如气缸的伸缩
04
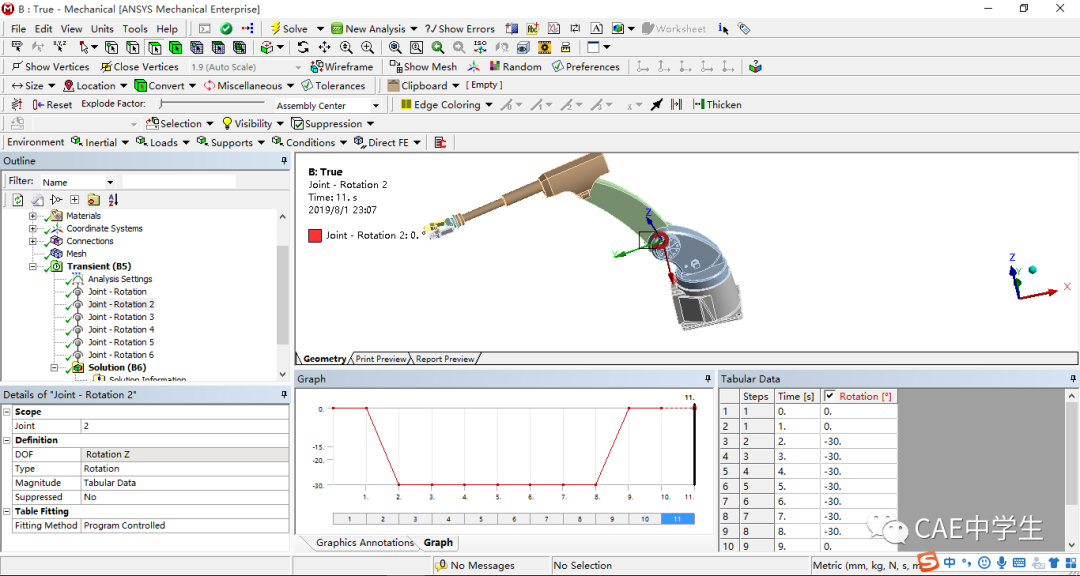
分析设置

注意:设置11个载荷步,将整个机械臂的动作分解为11步,第一步是1旋转,第二步是2旋转,依次类推,当第5步的5.6一起动作完毕之后,6-11个载荷步是机械臂返回动作




注意:比如2在第二个载荷步才会进行动作,那么很多人就会将第一个载荷步进行抑制(或者4在第四个载荷步才进行动作,直接将前三个载荷步抑制),这样做很可能出现问题,因为如果将第一个载荷步抑制的话,代表着2的那个关节在第一个载荷步是没有的,但是由于别的关节的动作以及惯性导致2会出现无规则的运动


注意:就如图所示一样,关节出现了无规则、杂乱的运动趋势,运动曲线出现很小波动与断点
正确设置




登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2022-06-09
最近编辑:2年前

硕士
|
仿真工程师
CAE中学生


相关推荐
最新文章
热门文章
