非线性可视化(4)庞加莱截面


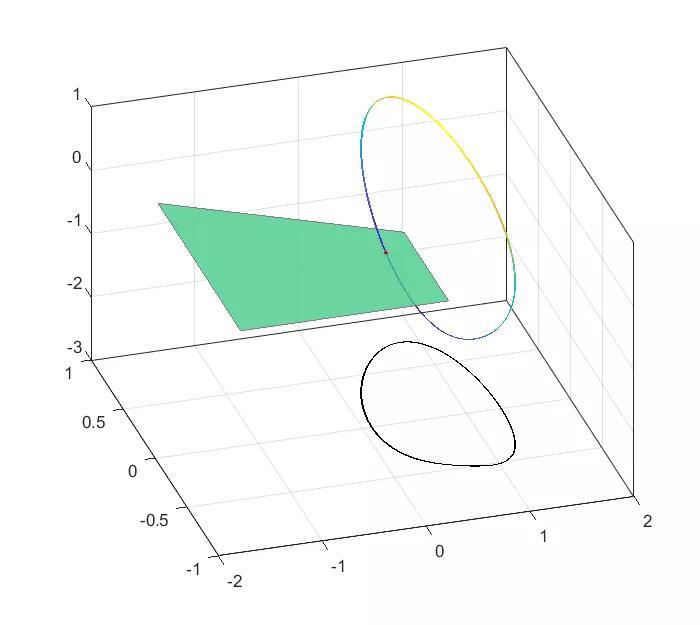

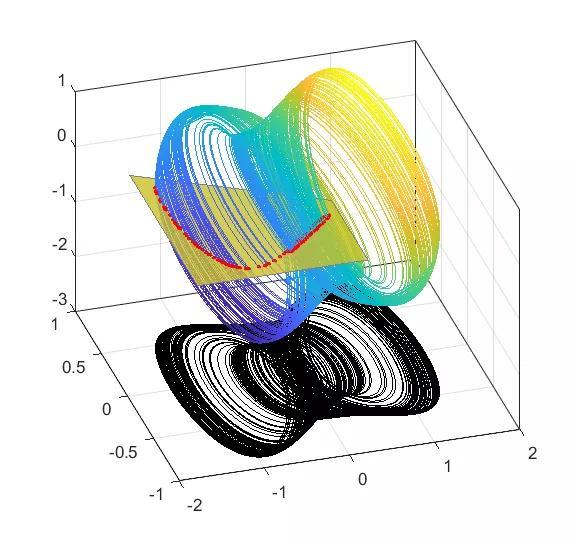
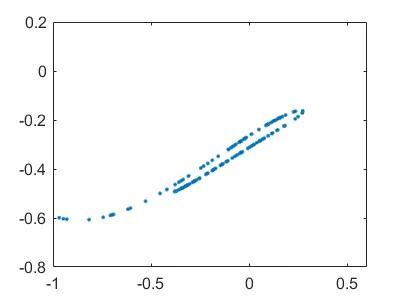
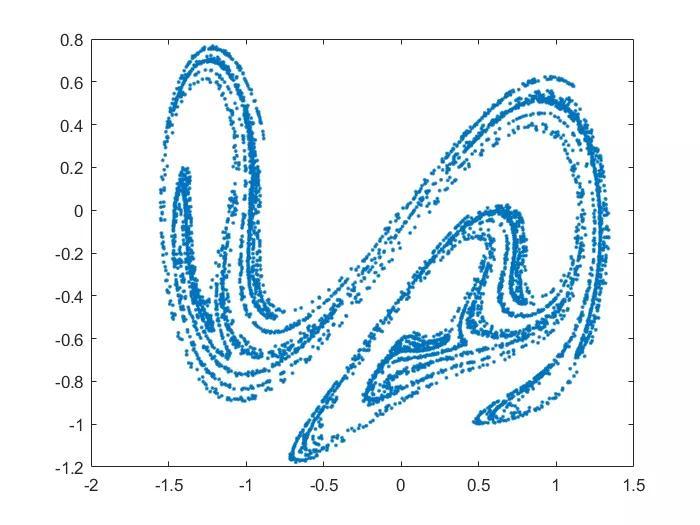

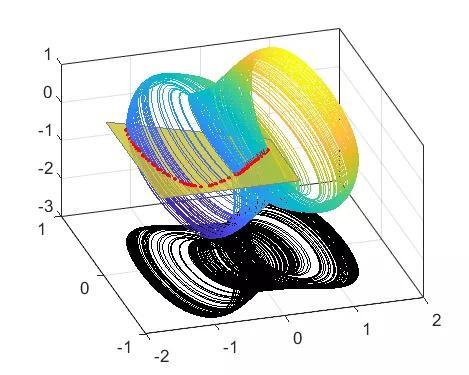
%庞佳莱截面%截面采用公式Ax By Cz D=0;的形式%采用杜芬方程演示clearclcclose all%第一步,计算出轨迹h=5e-3;x0=0:h:1600;y0=[0.1;0.1;1];%最后一项是cos(w*t),当t=0时必须为1.[y1,Output]=ODE_RK4_hyh(x0,h,y0,[1.15,1,1]);%[1.5,1,1],[1.35,1,1],[1.15,1,1],[0.1,0.35,1.4]Lx=y1(1,2000:end);Ly=y1(2,2000:end);Lz=y1(3,2000:end);Plane=[0;0;1;0];%一般情况下是个垂直某个轴的平面。这里是z=0[tP_List,yP_List]=Solve_Poincare(x0,y1,Plane);%计算Poincare平面上的点%绘图%1庞加莱截面%最开始几个点还没有稳定,没有体现出系统特点,所以放弃,从第10个点开始figure()plot(yP_List(1,10:end),yP_List(2,10:end),'.')xlim([-1,0.6])ylim([-0.8,0.2])%2投影的二维相平面figure()plot(Lx,Ly)%3展示用的示意图figure()hold onpatch([Lx,nan],[Ly,nan],[Lz,nan],[Lx Ly,nan],...'EdgeColor','interp','Marker','none','MarkerFaceColor','flat','LineWidth',0.8,'FaceAlpha',1);plot3(yP_List(1,10:end),yP_List(2,10:end),zeros(size(yP_List(2,10:end))),...'.','MarkerSize',8,'color','r')patch([-1.6,0.4,0.4,-1.6],[-0.7,-0.7,0.0,0.6],[0,0,0,0],[1,1,1,1],...'FaceAlpha',0.8,'EdgeColor',[0.5,0.5,0.5])view([-17,39])box ongrid on%绘制相图set(gcf,'position',[300 200 560 500])xlim([-2,2])zlim([-3,1])plot3( Lx,Ly,zeros(size(Ly))-3 ,'color','k')hold offfunction [tP_List,yP_List]=Solve_Poincare(t,y,Plane)%截面方程z=0% Plane=[0;0;1;0];%一般情况下是个垂直某个轴的平面%一般只记录从负到正穿越。如果想反向也记录,可以设置Plane=-Plane。%第一步,计算出轨线y%第二步,插值得到线与面的交点yP_List=[];tP_List=[];Dis=DistancePlane(y,Plane);N=size(y,2);for k=1:N-1if Dis(k)<=0 && Dis(k 1)>0t0=t(k);t1=t(k 1);yP0=y(:,k);yP1=y(:,k 1);Dis0=Dis(k);Dis1=Dis(k 1);%一维线性插值,求Dis=0时的t和y%(相比较前面积分的4阶RK,这里用线性插值精度有点低)yP=yP0 (yP1-yP0)/(Dis1-Dis0)*(0-Dis0);tP=t0 (t1-t0)/(Dis1-Dis0)*(0-Dis0);%储存yP_List=[yP_List,yP];tP_List=[tP_List,tP];endendend%点到平面的距离function Dis=DistancePlane(xk,Plane)% xk,坐标点,如果是3维坐标,大小就是3*N的矩阵。% Plane,平面,形如Ax By Cz D=0形式的平面。N=size(xk,2);%计算总共多少个点xk2=[xk;ones(1,N)];Dis=dot(xk2,Plane*ones(1,N),1)./norm(Plane(1:end-1));end%两点线性插值function y=interp2point_linear(x0,x1,y0,y1,x)y=y0 (y1-y0)/(x1-x0)*(x-x0);end%两点3次插值function y=interp2point_spline(x0,x1,y0,y1,x)%y0包含y0的值和y0的导数,yy=y0(1),dy=y0(2)xx0=x0;xx1=x1;yy0=y0(1);dy0=y0(2);yy1=y1(1);dy1=y1(2);cs = csape([xx0,xx1],[dy0,yy0,yy1,dy1],[1,1]);y=ppval(cs,x);endfunction [F,Output]=Fdydx(x,y,Input)%形式为Y'=F(x,Y)的方程,参见数值分析求解常系数微分方程相关知识%高次用列向量表示,F=[dy(1);dy(2)];y(1)为函数,y(2)为函数导数%杜芬方程duffing,参见中国大学MOOC,北京师范大学-计算物理基础-77倒摆与杜芬方程d=Input(1);r=Input(2);w=Input(3);dy(1)=y(2);dy(2)=-y(1)^3 y(1)-d*y(2) r*y(3);dy(3)=-w*sin(w*x);F=[dy(1);dy(2);dy(3)];Output=[];endfunction [y,Output]=ODE_RK4_hyh(x,h,y0,Input)%4阶RK方法%h间隔为常数的算法y=zeros(size(y0,1),size(x,2));y(:,1)=y0;for ii=1:length(x)-1yn=y(:,ii);xn=x(ii);[K1,~]=Fdydx(xn ,yn ,Input);[K2,~]=Fdydx(xn h/2,yn h/2*K1,Input);[K3,~]=Fdydx(xn h/2,yn h/2*K2,Input);[K4,~]=Fdydx(xn h ,yn h*K3 ,Input);y(:,ii 1)=yn h/6*(K1 2*K2 2*K3 K4);endOutput=[];end
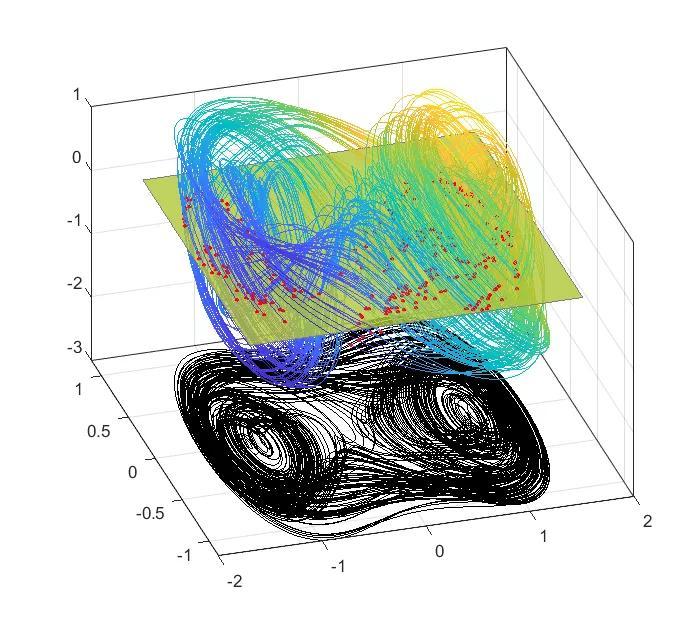
%庞佳莱截面%截面采用频闪采样法%采用杜芬方程clearclcclose all%第一步,计算出轨迹h=5e-3;x0=0:h:1600;y0=[0.1;0.1];%最后一项是cos(w*t),当t=0时必须为1.[y1,Output]=ODE_RK4_hyh(x0,h,y0,[1.15,1,1]);Lx=y1(1,:);Ly=y1(2,:);Lz=cos(1*x0);%不用计算截面的方式% Plane=[0;0;1;0];%一般情况下是个垂直某个轴的平面% [tP_List,yP_List]=Solve_Poincare(x0,y1,Plane);%计算Poincare平面%采用频闪采样法计算tP_Ideal=3*pi/2:(2*pi/1):x0(end);tP_List=zeros(1,length(tP_Ideal));Ind_List=zeros(1,length(tP_Ideal));for k=1:length(tP_Ideal)[~,Ind]=min(abs( tP_Ideal(k)-x0 ));Ind_List(k)=Ind;tP_List(k)=x0(Ind);endyP_List=y1(:,Ind_List);%绘图%3展示用的示意图figure()hold on% plot3(y1(1,:),y1(2,:),y1(3,:))patch([Lx,nan],[Ly,nan],[Lz,nan],[Lx Ly,nan],...'EdgeColor','interp','Marker','none','MarkerFaceColor','flat','LineWidth',0.8,'FaceAlpha',1);plot3(yP_List(1,10:end),yP_List(2,10:end),zeros(size(yP_List(2,10:end))),...'.','MarkerSize',8,'color','r')patch([-1.6,0.4,0.4,-1.6],[-0.7,-0.7,0.0,0.6],[0,0,0,0],[1,1,1,1],...'FaceAlpha',0.8,'EdgeColor',[0.5,0.5,0.5])view([-17,39])box ongrid on%绘制相图set(gcf,'position',[300 200 560 500])xlim([-2,2])zlim([-3,1])plot3( Lx,Ly,zeros(size(Ly))-3 ,'color','k')hold offfunction [F,Output]=Fdydx(x,y,Input)%形式为Y'=F(x,Y)的方程,参见数值分析求解常系数微分方程相关知识%高次用列向量表示,F=[dy(1);dy(2)];y(1)为函数,y(2)为函数导数d=Input(1);r=Input(2);w=Input(3);%降维后的Duffing方程dy(1)=y(2);dy(2)=-y(1)^3 y(1)-d*y(2) r*cos(w*x);% dy(3)=-w*sin(w*x);F=[dy(1);dy(2)];Output=[];endfunction [y,Output]=ODE_RK4_hyh(x,h,y0,Input)%4阶RK方法%h间隔为常数的算法y=zeros(size(y0,1),size(x,2));y(:,1)=y0;for ii=1:length(x)-1yn=y(:,ii);xn=x(ii);[K1,~]=Fdydx(xn ,yn ,Input);[K2,~]=Fdydx(xn h/2,yn h/2*K1,Input);[K3,~]=Fdydx(xn h/2,yn h/2*K2,Input);[K4,~]=Fdydx(xn h ,yn h*K3 ,Input);y(:,ii 1)=yn h/6*(K1 2*K2 2*K3 K4);endOutput=[];end
登录后免费查看全文
著作权归作者所有,欢迎分享,未经许可,不得转载
首次发布时间:2021-12-08
最近编辑:2年前

博士
|
讲师
讨论号:927550334

相关推荐
热门文章
