柱坐标系下的弹性力学问题

来源:力学酒吧,作者:张伟伟
柱坐标是在极坐标的基础上发展起来的,相当于地将极坐标面向z方向拓展,在极坐标里确定一点的位置坐标为 (ρ,ψ),在柱坐标里则为(ρ,ψ,z)。
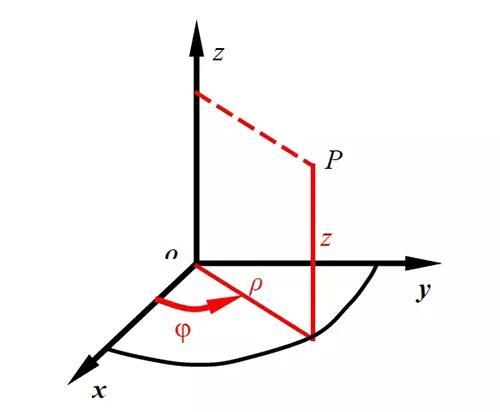
图1 柱坐标示意图
我们知道,极坐标在处理圆形、扇形、楔形等平面问题时具有显著的优势。当弹性体具有空间轴对称性时,采用柱坐标将会带来极大的方便性。所谓空间轴对称问题,则弹性体关于通过对称轴的任意平面都对称。此外,轴对称也是绕轴对称,过对称轴做任意平面与空间几何体相交,产生的形状都相同。常见的空间轴对称结构如圆柱体、圆台、圆锥和椭球体等。

图2 工程上的各类轴对称结构举例
空间轴对称弹性力学问题,除了要求弹性体几何上具有轴对称性,还必须要求其所受的载荷和约束也是轴对称的。举例而言,混凝土浇筑管道,在其外表面360°受相同的位移约束,为轴对称约束;当管道内受均匀内压时,其载荷也为轴对称。此时,求解管道的应力、应变、位移,该问题可简化为轴对称问题,且应力、应变、形变位移也应该具有空间轴对称性。

图3 混凝土浇筑管道其约束和载荷轴对称示意图
以下分别讨论空间轴对称问题的基本方程,以及其边界条件。我们先分析空间轴对称问题的形变位移。
对于空间轴对称问题,因为弹性体的几何结构、载荷、约束均为轴对称,其变形也必然为轴对称,设uρ、uφ、w 是弹性体的形变位移分量,则可以导出uφ≡0。如图4所示,设p 和p' 的位移绕z 轴对称,旋转任意角度后位移分量都相同,考虑绕轴对称,从P 点旋转到p'点,其环向位移方向如图中实线所示。另一方面,轴对称问题过对称轴的任意平面都是对称平面,因此p 和p' 的位移又关于y 轴对称,p' 点的环向位移为图中虚线所示。由于p' 不能同时向两个相反方向运动,所以p' 点的位移只能为0,即uφ≡0。
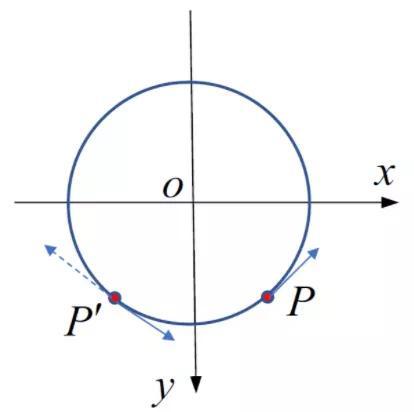
图4 轴对称图形上点的环向位移
可见轴对称问题位移分量uφ 与φ 的取值无关,同理也可以证明轴对称问题uρ(ρ 方向的位移)和w(z 方向的位移)也与φ 无关,它们只是 (ρ, z) 的函数,具有相同z 坐标和ρ 坐标的点,其uρ 和w 均相同。
现在我们来考虑柱坐标系下弹性体的变形问题,推导坐标系下的几何方程。参考图5所示的构型P-ABC,设PA=dρ,PB=ρdφ,PC=dz。以下分别考虑ρ 和z 两方向位移产生的应变分量,然后叠加得到总的应变分量。
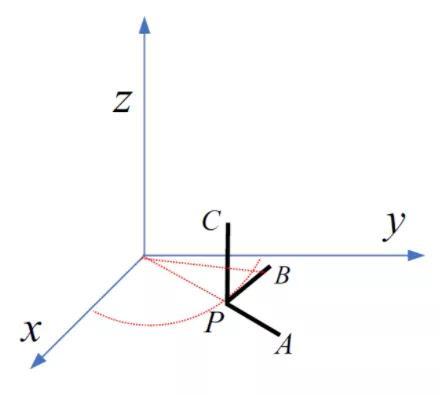
图5 推导几何方程的空间构型
(1) 只有径向(ρ 方向)位移时
PB变形前长ρdφ,变形后长 (ρ uρ)dφ(设径向位移量为uρ),因此
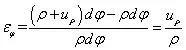
对于PA,设P点位移uρ,则A点位移uρ (əuρ/əρ)dρ,因此

对于PC,设P点位移uρ,则C点位移uρ (əuρ/əz)dz,因此PC变形后的长度为√dz² (əuρ/əz)²,考虑小变形假设,有əuρ/əz<<dz,因此,PC变形后的长度近等于原长,因此εz=0。
考察∠APB的改变量,由于只有径向位移,PA不发生偏转。从P点到B点,只是φ 坐标增加dφ,因此P点和B点方向位移相等,因此PB也不发生偏转。所以γρφ=0。
考察∠BPC的改变量,由于P点和B点在ρ 方向位移相等,变形前后PB都垂直于面PAC,而PC只在面PAC中变形,因此PB变形前后都垂直于PC。所以γzφ=0。
考察∠APC的改变量,因为P点位移uρ,则C点位移uρ (əuρ/əz)dz,因此PC将发生偏转,同时也是γzρ 的取值为
(2) 只有轴向(z方向)位移时
对于PA和PB,变形后它们可能略有倾斜,由于小变形假设,倾斜量很小,它们变形后的长度近似等于变形前的长度(类似于只考虑径向位移时,PC的变化),因此有ερ=0,εφ=0。
对于PC,设P点位移为w,则C点位移为w (əw/əz)dz,因此
考察∠APB的改变量,考虑对称性,P点和B点在z方向的位移相等,当只有z方向位移时,PB始终垂直于面PAC,因此,γρφ=0。
考察∠BPC的改变量,只有z方向位移时,PC不发生偏转,PA可能发生偏转。设P点位移为w,则A点位移为w (əw/əρ)dρ,因此

(3) 叠加
当同时存在径向位移和轴向位移时,叠加上述两种情况下的应变分量,得到空间轴对称问题总的几何方程,为

γzφ≡0,γρφ≡0,求解空间轴对称问题时,可以不予考虑。
上式所示,即为空间轴对称问题的几何方程,可以看出对于空间轴对称问题,只需要考虑4个应变分量。现在考虑广义胡克定律,有

由于γzφ≡0,γρφ≡0。可以导出τzφ=0和τρφ=0。因此,广义胡克定律只有4个方程。将上式中前三项相加,得

θ 称为体积应变,有θ=ερ εφ εz,Θ 称为体积应力,有Θ=σρ σφ σz。将广义胡克定律写成以应变表示应力的形式为

从上式可以更清楚的看到,空间轴对称问题只需要考虑4个应力分量,减少了2个应力分量,使问题得到简化。
考虑空间轴对称问题,取如图6(a)所示的微元体,该微元体由两个柱面以及两个通过对称轴的平面组成,高度为dz,两个柱面之间的距离为dρ,两个过对称轴的平面所成角度为dφ。以P点为基准点,写出各面上的应力分量,PAB面上为σz、τzρ,PAC面上为σφ,PBC面上为σρ、τρz,利用泰勒级数展开式,只保留一阶导数项,可写出微元体各相对面上的应力分量,同时考虑体力fρ 和fz,如图6(b)和6(c)所示。
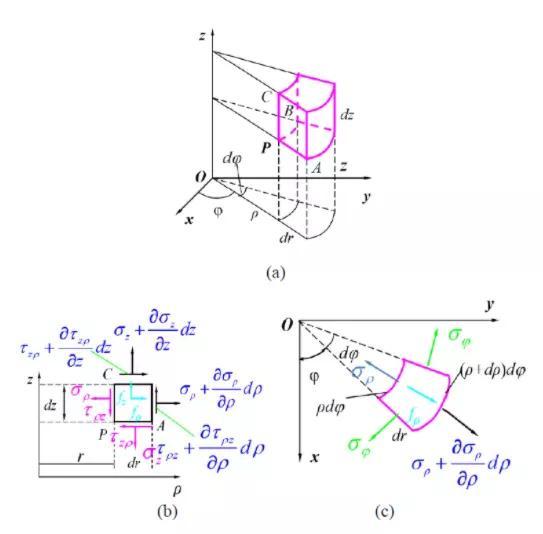
图6 空间轴对称问题微元体模型
列出极径方向(ρ 方向)的平衡方程,有ΣFρ=0
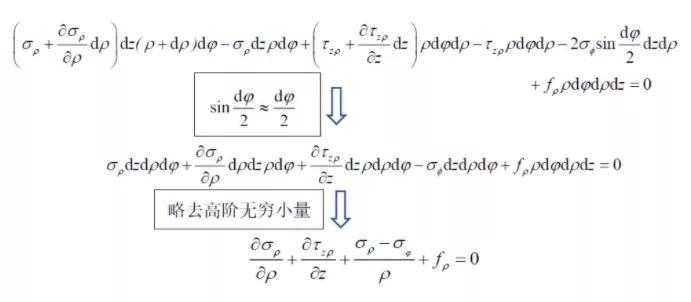
列出轴向(z 方向)的平衡方程,有ΣFz=0

列环向(φ 方向)的平衡方程,有ΣF𝜙≡0为恒等式。因此,空间轴对称问题的平衡方程为
至此,我们已经看到,对于空间轴对称问题,平衡方程有2个,几何方程4个,物理方程4个,共十个基本方程,未知量包括2个位移分量uρ、w,4个应变分量ερ、εφ、εz、γzρ 和4个应力分量σρ、σφ、σz、τzρ,共十个未知量,构成封闭方程组。
想象一下,求解空间轴对称问题基本方程时,由于平衡方程和几何方程为微分方程,必然会存在积分常数,需要借助应力边界条件和位移边界条件来确定。
首先说应力边界条件,由于柱坐标也是正交坐标系,因此仿照直接坐标系,可以写出柱坐标系的边界条件,如
由于τzφ=0和τρφ=0,且轴对称条件下可导出 。因此,上式变为
。因此,上式变为
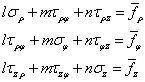
其中,l 为表面外法线与ρ 方向夹角的余弦,m 为表面外法线与φ 方向夹角的余弦,n 为表面外法线与z 方向夹角的余弦。我们以圆柱体(图7(a))和圆锥体(图7(b))为例,写轴对称问题的边界条件。
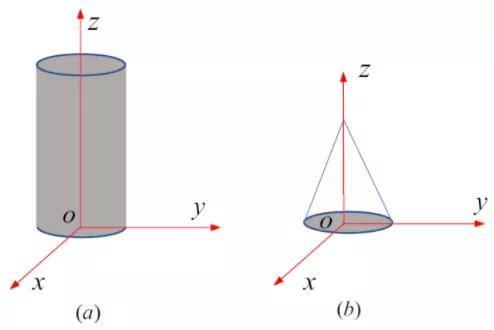
图7 空间轴对称问题边界条件示意图
先考虑圆柱体,它有三个表面,上下圆面和圆柱面。在圆柱面上,ρ=a 时(设圆柱体的半径为a),l=1,n=0,讲其代入边界条件(上式),有
在底面上,z=0时,l=0,n=-1,将其代入边界条件,有
在顶面上,z=h 时(设圆柱体的高度为h),l=0,n=1,将其代入边界条件,有
再考虑圆锥体,它有两个表面,圆锥面和底面,设圆锥体的顶角为θ,高为h,将圆锥体想象成许多圆面,每个圆面的半径为(h-z)tanθ。
在圆锥体锥面上,ρ=(h-z)tanθ 时,l=cosθ,n=sinθ,代入边界条件,有
在底面上,z=0时,l=0,n=-1,将其代入边界条件,有

以上即为空间轴对称问题的应力边界条件。考虑位移边界条件时,由于φ 方向的位移恒等于0,即uφ=0,只需要分析约束在oρz 平面内的位移约束分量,即边界处uρ、w,以及əuρ/əz(或者əw/əρ)。对于实际工况,可考虑约束是否限制了边界处的线位移和角位移,例如三个位移都被约束的情况,可写成
也可能是其中的两项被约束,或者一项被约束,需要根据实际工况进行判定。对于多连体,位移边界条件还需要考虑位移单值条件。
参考资料:徐芝纶. 《弹性力学》(第5版). 高等教育出版社.


