CAE前处理 | 转轴类连接

以下文章来源于仿真求知之路 ,作者ansys-聪聪
本文摘要(由AI生成):
文章主要探讨了在装配体分析中,如何模拟转轴等仅传递部分自由度的连接方式。作者首先提出了问题的核心,即如何在局部坐标系下只传递需要的自由度,并提出了几种可能的解决方案。接着,文章详细介绍了使用rbe2、rbe3、beam、cbush和joint类单元来实现转轴连接的方法,并通过标准验证案例来验证这些方法的可行性。文章还指出了各种方法的优缺点和不合适的使用场景,最后总结了实现转轴类结构模拟的基本途径和注意事项。
引言
装配体分析中经常遇到转轴等仅传递部分自由度的连接方式。如果直接使用实体 通用接触的方法,在线性分析体系下会直接识别为绑定接触,因此需要对适用于线性分析体系的转轴类连接简化方法进行一个简单的总结(针对hyperowrks的结构分析求解器)。
简述

如图所示转轴结构,模拟的核心在于如何只传递局部坐标系下需要的自由度,按照常规思路,我们可以做出以下猜想:
①能不能释放不需要传递的自由度?
②能不能不耦合不需要传递的自由度?
③是否存在仅具备对应自由度的单元?
④是否能削弱不需要传递的自由度?
于是我们快速检索了下自己的知识库,发现以下单元可能能够满足预期:
rbe2单元可以控制从节点的耦合自由度
rbe3单元既可以控制从节点的耦合自由度,也可以控制主节点的传递自由度
beam单元可以控制端部节点自由度的释放
cbush单元可以控制局部坐标系下的各向刚度
joint类拥有各种不同类型自由度传递的单元
下面分别就上述的几种实现方法进行说明,并指出一些不合适的使用场景。
模型说明
为了验证各种方法的可行性,需要准备一个标准验证案例:
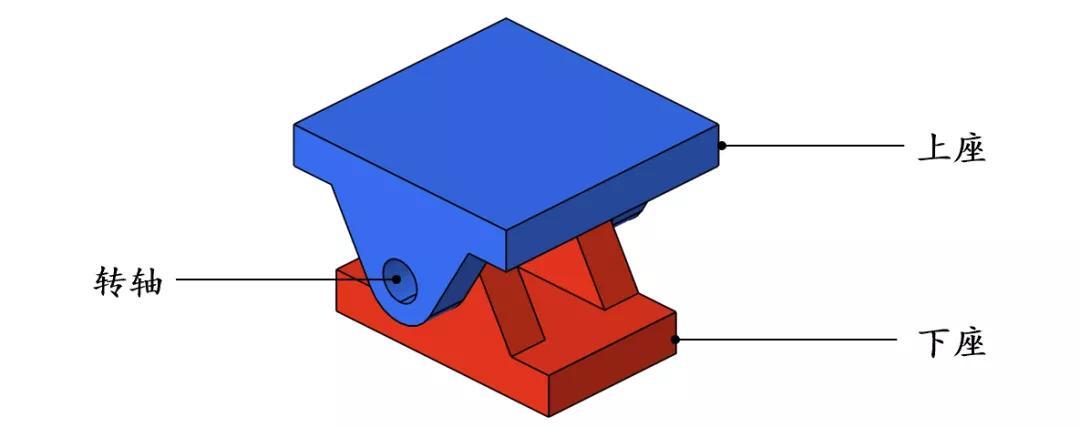
如图所示为典型的转轴类连接结构,上下座通过转轴连接,现在需要使用该模型对各种自由度传递方法进行验证。
验证方法:约束模态分析
结果现象:1阶阵型为相对自转 2阶阵型为正常弯扭,并且两阶模态频率相差较大
方法验证
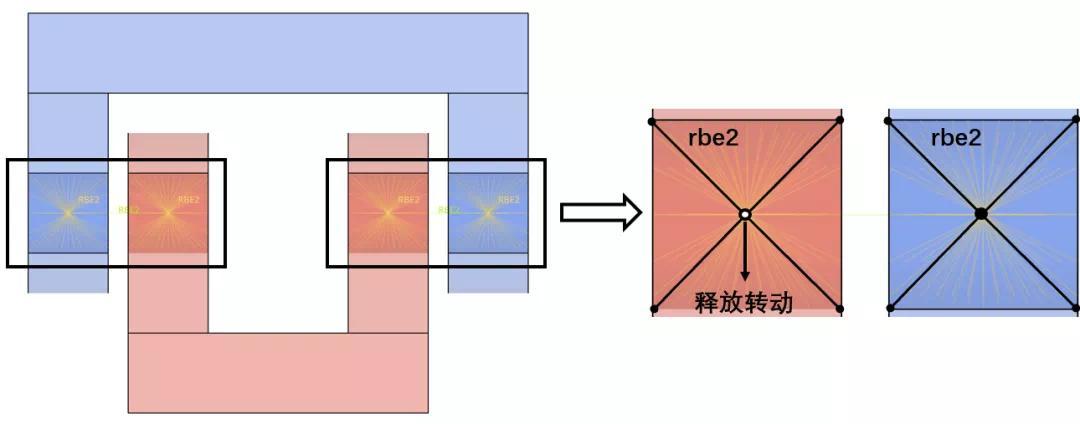
刚性单元属于耦合类单元,因此可以通过控制耦合的自由度来达到只传递部分需要自由度的目的,具体实现如下:
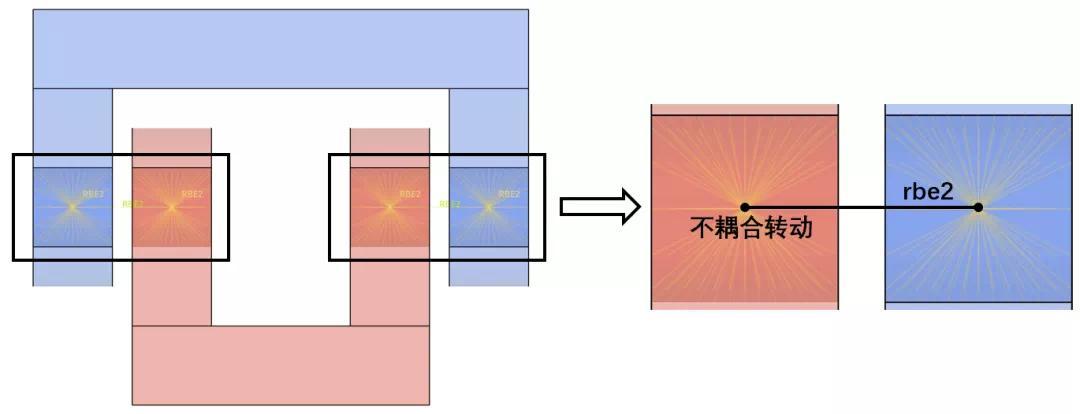
如图,我们不对中间连接单元从节点的转动自由度进行耦合,这样就能实现以下效果:
可以看到,1阶阵型为销轴自转,2阶阵型为结构本身变形,两阶模态频率相差较大,实现了我们预期的转动释放效果。
使用rbe2虽然能够达到预期效果,但是有两个缺点:一是刚性单元的使用会加剧局部刚度,二是全部使用刚性单元会使得建模没有可调空间,因此我们自然会想到使用rbe3单元:
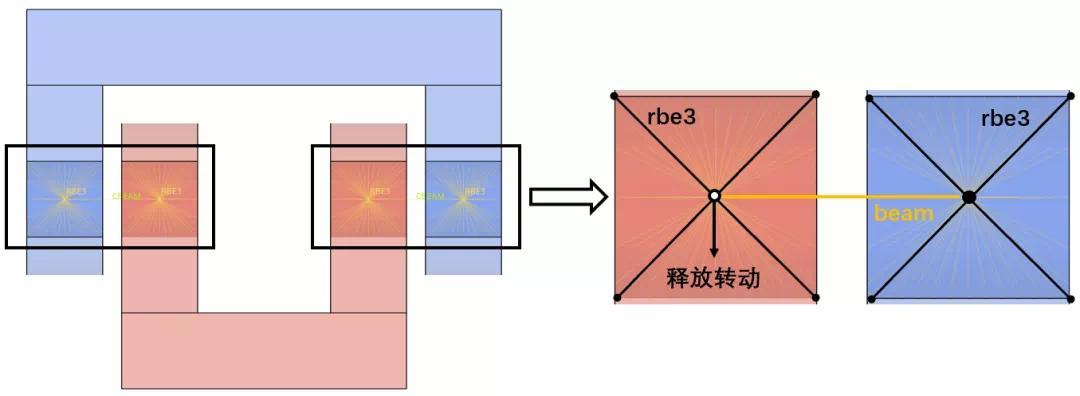
如图所示,使用rbe3单元进行耦合,梁单元作为轴,将一侧rbe3单元的转动自由度释放掉,这样在保留一定刚度可调空间下能达到如下效果:
由于使用了rbe3以及beam单元组合,因此相对于单纯的rbe2单元刚性小了很多,这一点从右上角固有频率可以看出。
上面通过释放rbe3单元主节点的转动自由度实现了自由转动,实际还可以通过梁单元的pina和pinb来释放梁端点的转动自由度:
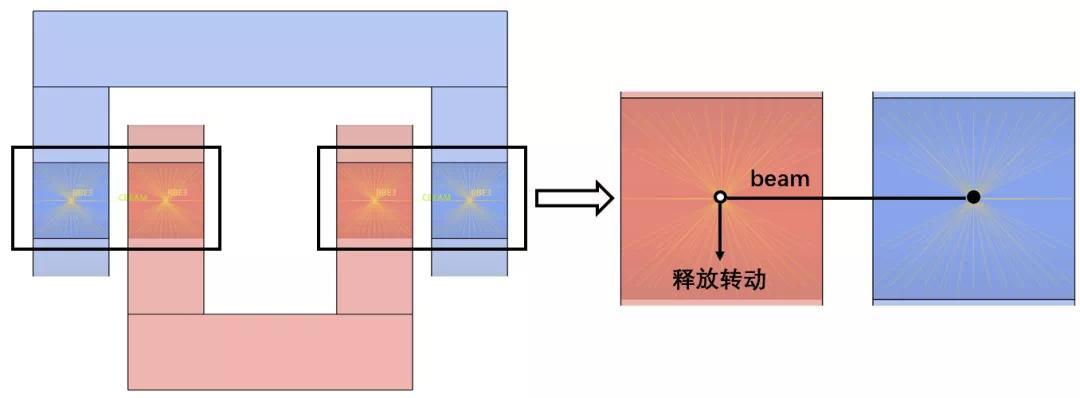
实现的效果和上述基本一致:
当然我们也可以把这里面的rbe3单元换成rbe2单元来配合beam使用。
通过上面耦合以及自由度释放的演示大家也感觉到了,不同连接方式对结构刚度是有影响的,对于有确定连接部位刚度值的结构,就比较适合使用cbush单元模拟:
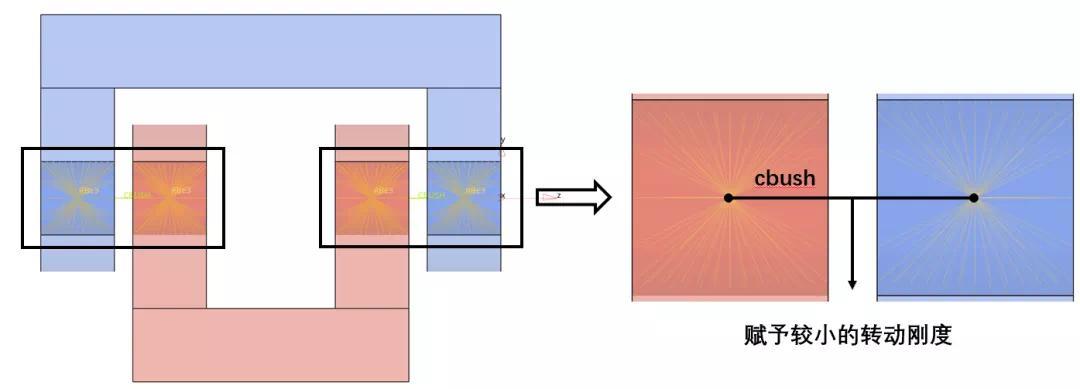
如图所示,使用cbush连接轴心点,设置cbush单元的转动刚度较低,其余方向按照真实值或者rigid,这样可以得到如下模拟效果:
可以看到,由于cbush可以指定六个方向的刚度,因此2阶阵型明显和前面的几种不太一样,可以通过调整刚度贴近实际情况。
可能大家对于转轴模拟一开始想到的就是运动副单元,下面我们来试一下:
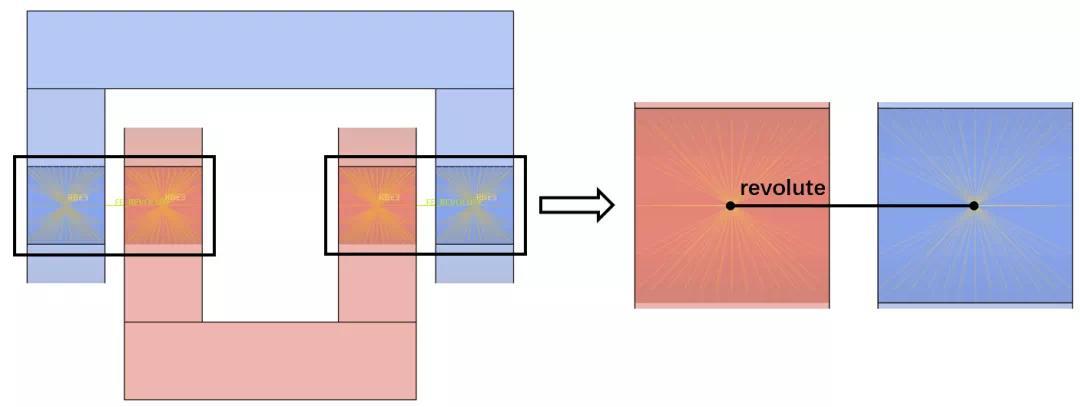
如图所示,我们直接使用joint中的转动副revolute连接轴心点,计算得到结果如下:
可以看到,虽然转动是释放了,但是继续看后面的阵型结果就会发现,运动副单元得到了一些非常奇怪的结果。虽然不知道原因,但是建议对于在opti线性静力分析中避免使用运动副单元。
不合理使用
上面分别列举了合理使用rbe2,rbe3,beam以及cbush得到转轴效果的方法,这部分列举一些典型的不合理方法:
①释放rbe2主节点自由度
错误原因:rbe2的主节点自由度不能释放,只能释放从节点自由度,这样释放达不到效果。
②使用rod单元
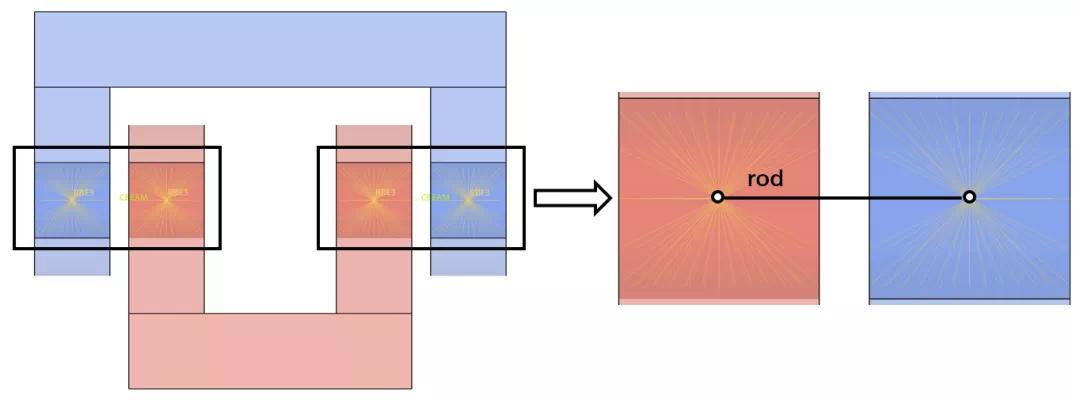
错误原因:①opti求解器中的rod单元属于拉压扭单元 ②弯曲刚度同时会被释放。
③自由度释放过度

错误原因:如果两侧梁单元自由度均释放,则梁拥有自转自由度,约束不足。
倾斜转轴
上面的示例均为转轴处理全局X方向,如果转轴倾斜应该怎么处理达到如下效果:
由于篇幅影响,这里简述一下:
①对于使用梁单元释放方法建立的转动副,梁轴线一直为X轴,所以梁单元不需要额外处理;
②对于使用rbe2,rbe3释放或者耦合自由度方式建立的转动副,哪里释放或者耦合就将哪里的节点自由度转动到局部坐标系下释放;
③对于使用cbush单元建立的转动副,只需要将对应的局部坐标系赋予给pbush即可。
总结
通过上面的探讨,我们了解了实现转轴类结构模拟的基本途径,以及各种方法的优缺点和注意事项:
①rbe2使用起来较为方便,但是一定要注意rbe2操作的是从节点不是主节点;
②rbe3不像rbe2单元刚性那么大,自由度释放上相对不容易出错,但是需要注意rbe3尽量不要和rbe2共同使用,要不然容易两种单元的主从节点打架;
③beam单元由于X轴为轴向,所以倾斜转轴不需要调整,但是需要分辨beam两端节点,并且不要过度释放自由度;
④cbush单元可以通过削弱刚度来实现转轴模拟,但是注意cbush的rigid不是真的rigid,0不是真的0;
⑤opti求解器中的运动副单元不适合在线性分析体系下使用,所以一定得谨慎验证其特点再使用。