汽车的操纵稳定性

1. 概述
一、汽车操纵稳定性定义
汽车操纵稳定性是指汽车在行驶过程中,能遵循驾驶员给定的行驶方向行驶,且受各种外部干扰尚能保持稳定行驶的能力。
汽车的操纵稳定性包括操纵性和稳定性。
汽车操纵性是指汽车能够确切地响应驾驶者转向指令的能力;而稳定性是指汽车抵抗外界干扰而保持稳定行驶的能力,或汽车受到外界扰动后恢复原来运动状态的能力。
通常,汽车操纵性和稳定性两者关系密切,若汽车操纵性变坏,则汽车容易产生侧滑、翻车而失去稳定性;而汽车稳定性变坏,则汽车又难以操纵直接影响操纵性。
实际上两者难以截然分开,因此,常统称为汽车的操纵稳定性。
汽车的操纵稳定性不仅影响汽车驾驶的操纵方便程度,而且还决定着高速汽车的行车安全,所以人们称汽车操纵稳定性是高速车辆的生命线。
随着汽车保有量的增加和汽车车速的提高,汽车的操纵稳定性越来越重要,已成为现代汽车的主要使用性能之一。
操纵稳定性不好的具体表现
“飘”—汽车自己改变方向。升力或转向系、轮胎、 悬架等问题。
“反应迟钝”—转向反映慢。传动比太大。
“晃”—左右摇摆,行驶方向难于稳定。
“丧失路感”—操纵稳定性不好的汽车在高速或急剧转向时会丧失路感,导致驾驶员判断的困难。
“失控”—某些工况下汽车不能控制方向。制动时无法转向,甩尾,侧滑,侧翻。
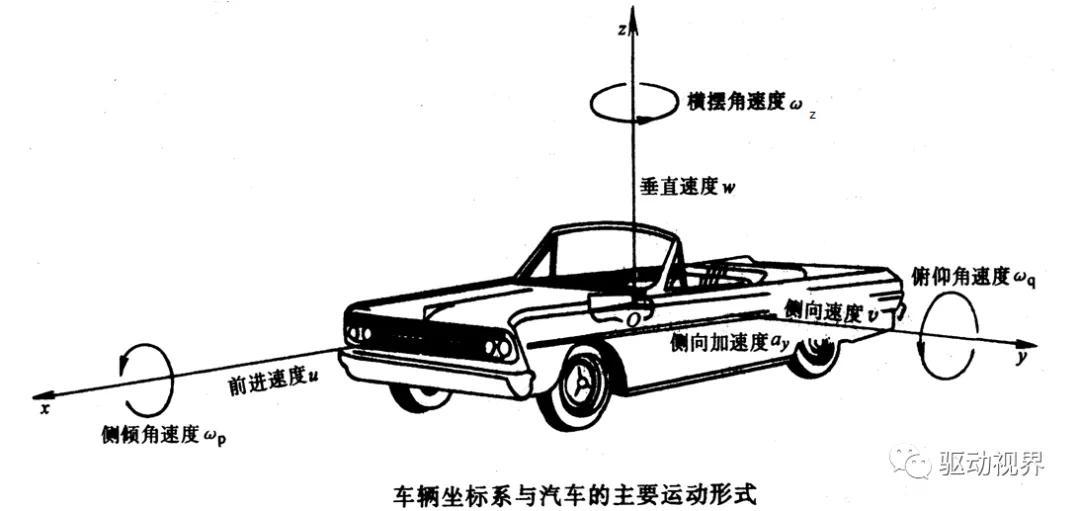
二、车辆坐标系与转向盘角阶跃输入下的时域响应
1.车辆坐标系和汽车主要运动形式
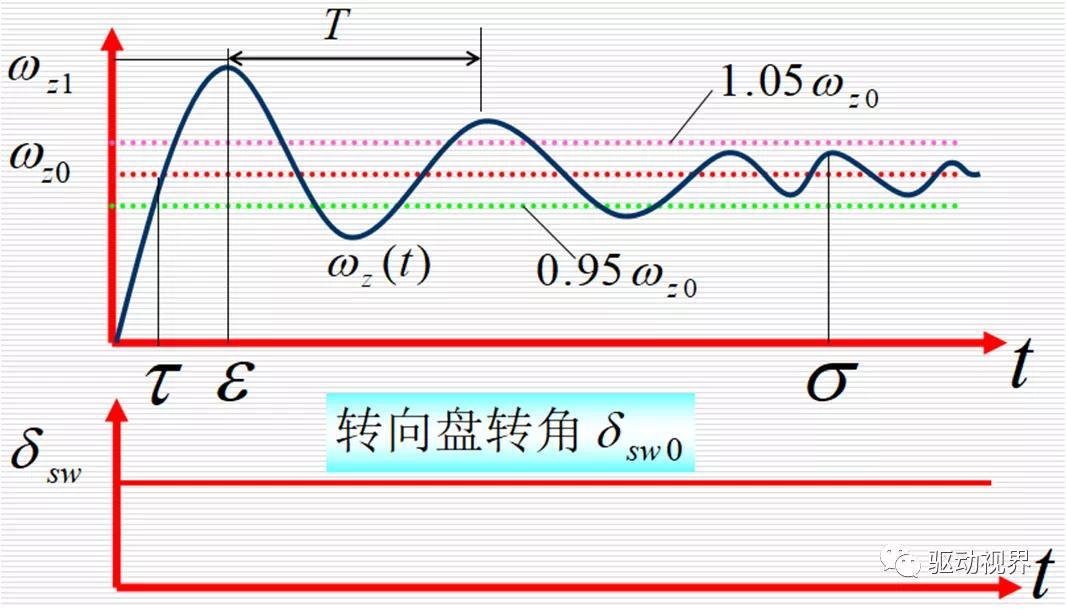
2. 汽车的时域响应
汽车瞬态响应
转向盘角阶跃输入下的瞬态响应:等速直线行驶和等速圆周行驶两个稳态运动之间的过渡过程所对应的瞬间运动响应。

汽车的时域响应
汽车稳态响应
转向盘角阶跃输入下进入的稳态响应:等速直线行驶,急剧转动转向盘,然后维持转角不变,即对汽车施以转向盘角阶跃输入,汽车经短暂的过渡过程后进入等速圆周行驶工况。
三、人--车闭环系统
汽车时域响应是把汽车作为开环控制系统的控制特性。
驾驶员-汽车系统是一个闭环控制系统:在汽车行驶过程中,驾驶员根据需要,操纵转向盘使汽车做转向运动。
路面的凹凸不平、侧风、偏载等影响汽车的行驶。
驾驶员根据道路、交通等情况,通过眼、手及身体感知的汽车运动状况(输出参数),经过头脑的分析、判断(反馈),修正其对转向盘的操纵。
如此不断地反复循环,操纵汽车行驶前进。
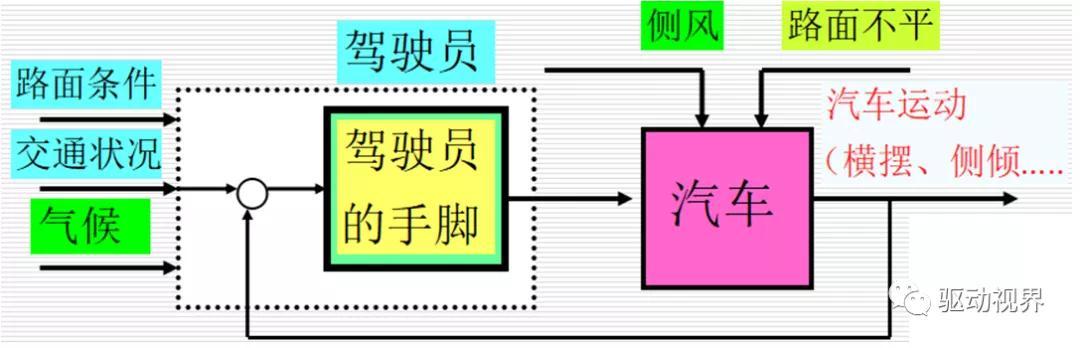
驾驶员--汽车闭环系统
四、汽车操纵稳定性评价方法
汽车试验的两种评价方法
客观评价法
客观评价法是通过仪器测出表征性能的物理量来评价操纵稳定性的方法,它能通过分析求出其与汽车结构参数间的关系。
主观评价法
主观评价法就是感觉评价。
考虑到了人的感觉,能发现仪器不能测试出的现象,是操纵稳定性的最终评价方法,但很难给出定量评价数据。
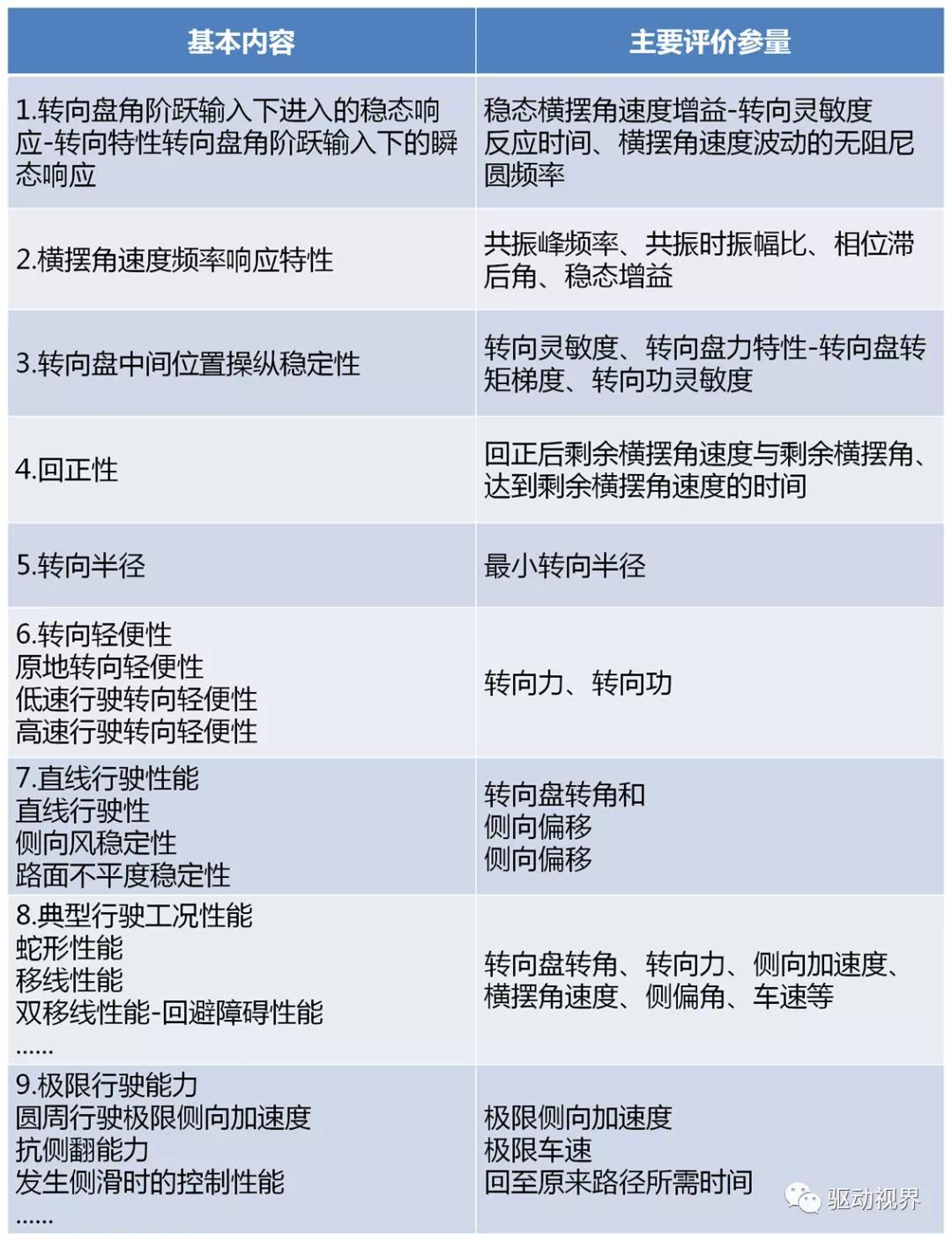
汽车操纵稳定性评价方法
汽车操纵稳定性的基本内容及评价所用物理参量
2. 汽车行驶稳定性
一、侧向稳定性
侧向稳定性是指汽车抵抗侧翻和侧滑的能力。
1. 侧向稳定性条件
若汽车转弯行驶满足一定条件,则不会产生侧向翻车和滑移。
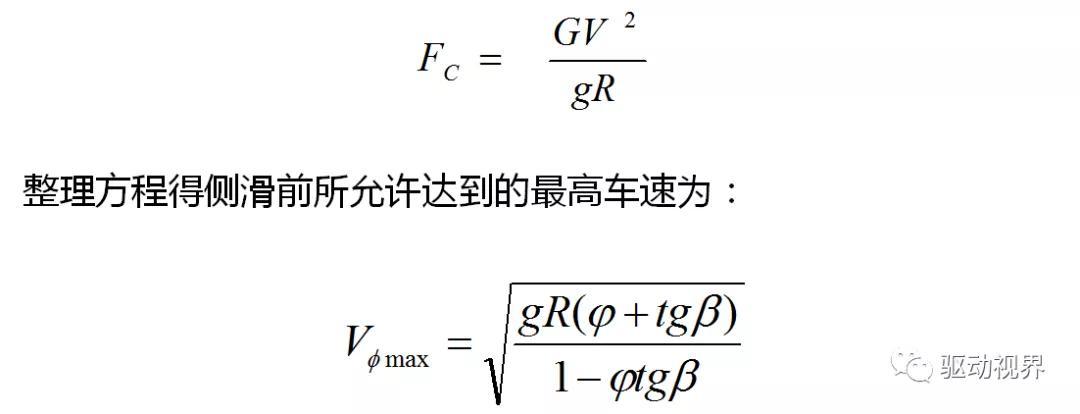
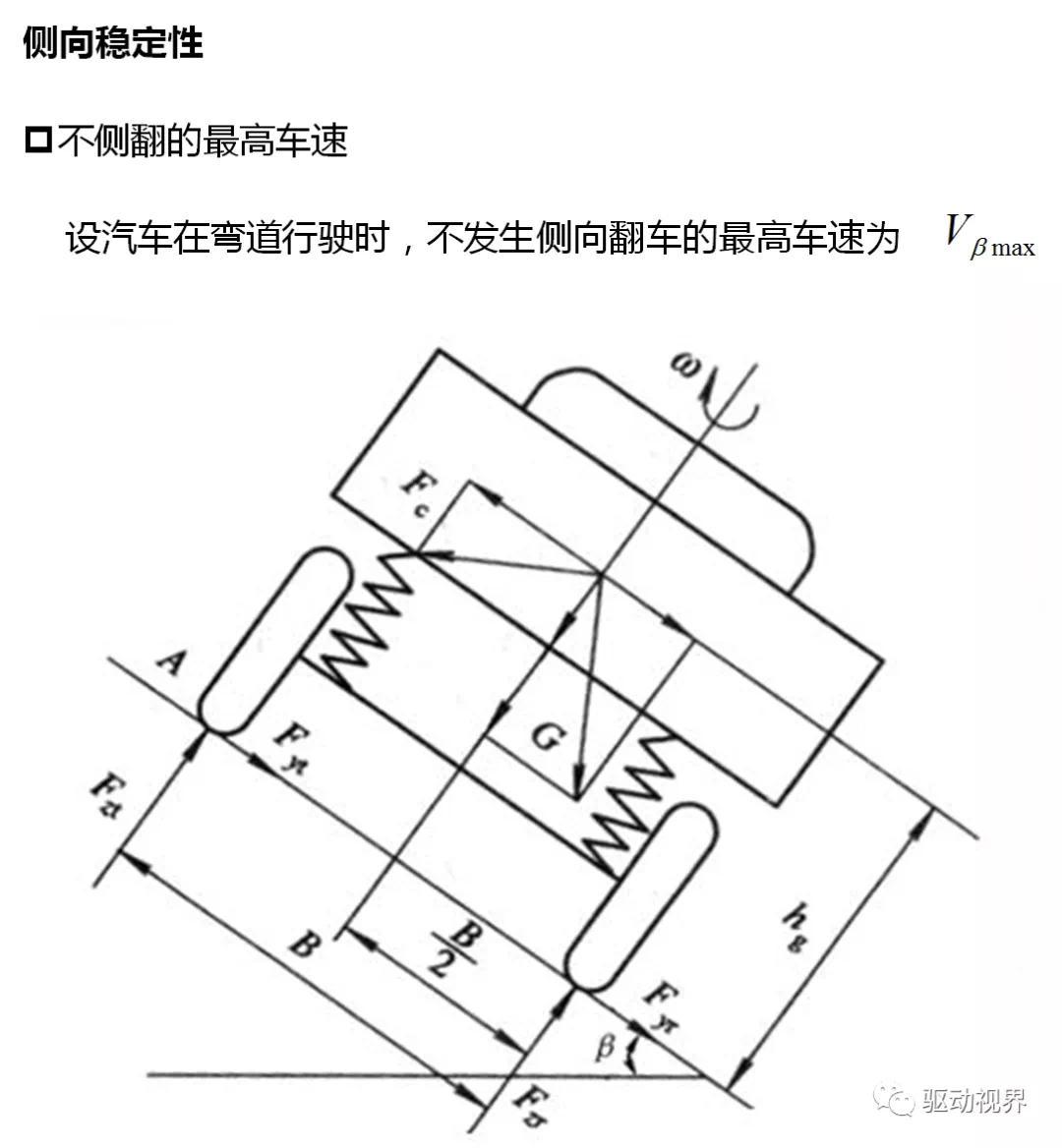
不侧滑的最高车速
设汽车在弯道行驶时,不发生侧向滑移的最高车速为
侧向稳定性
画受力图分析(汽车在横向坡度角为β的路面等速向右转向行驶)

侧向稳定性
汽车在侧向坡道上行驶侧滑的临界条件
Fyl=Fzlφ、Fyr=Fzrφ 或Fyl Fyr=(Fzl Fzr)φ
其方程如下:
FCcosβ-Gsinβ=(FCsinβ Gcosβ)φ
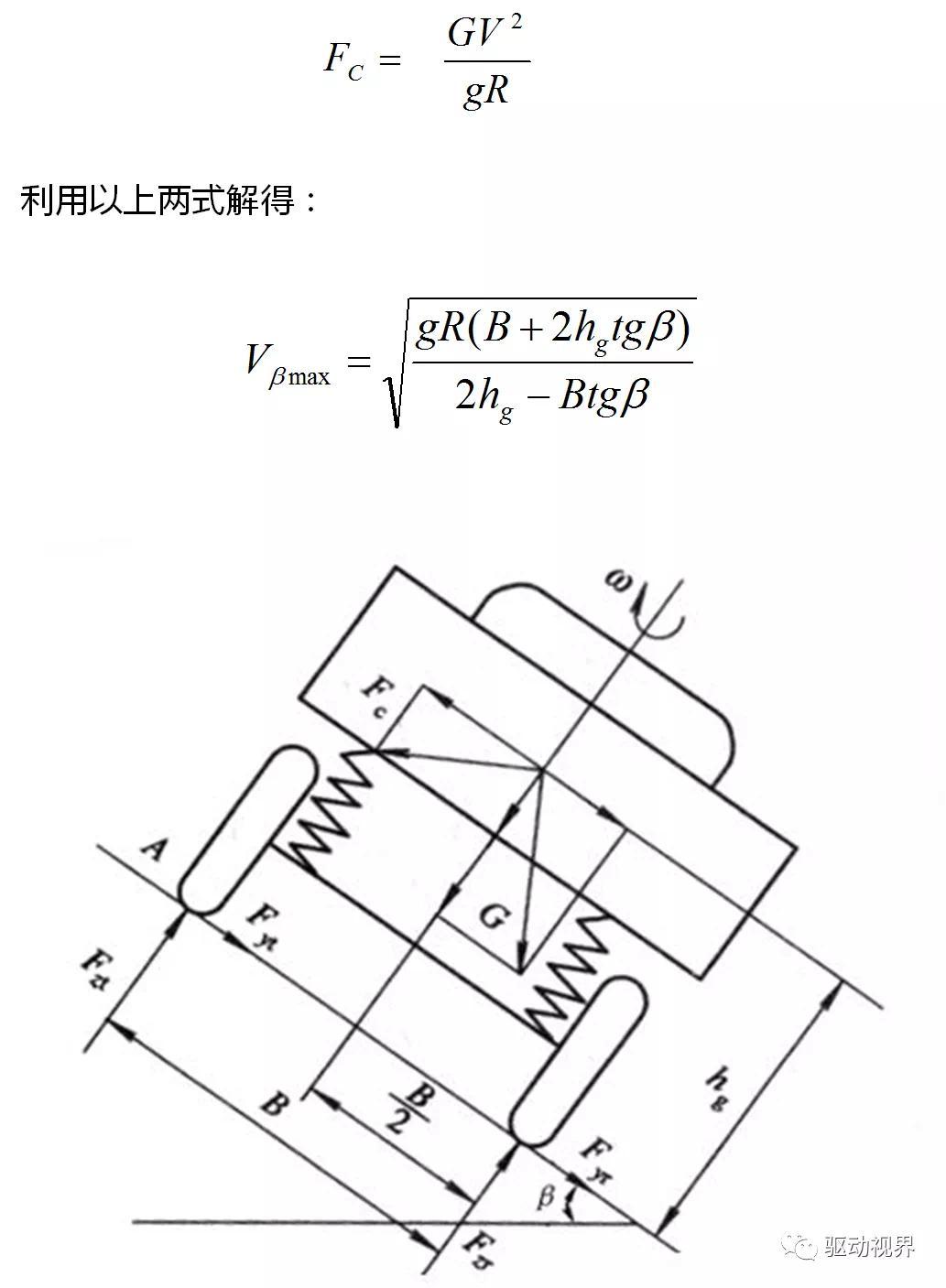
当汽车沿半径为R之圆周等速行驶时有
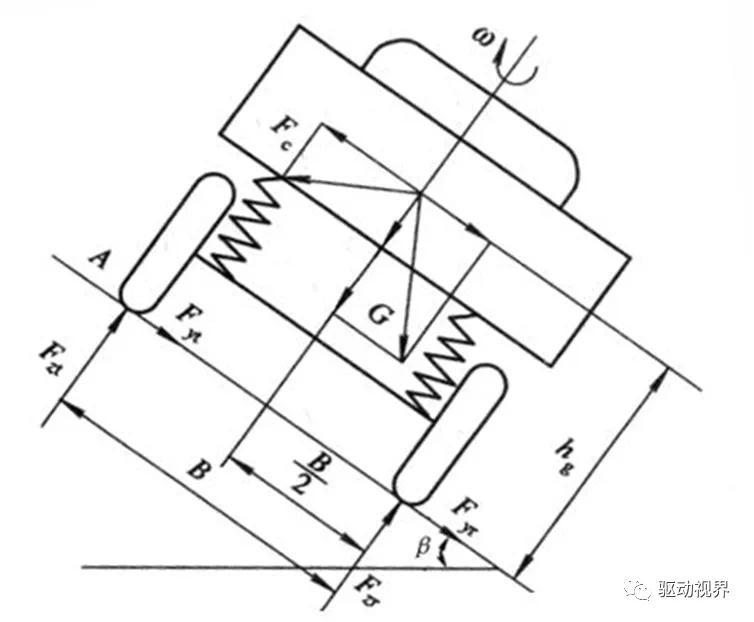
汽车在侧向坡道上行驶侧翻的临界条件
当Fzr=0时,汽车可能失去侧向稳定而向左侧翻,其不侧翻的条件为:
FCcosβhg≤FCsinβB/2 GcosβB/2 Gsinβhg
当汽车沿半径为R之圆周等速行驶时有:
侧向稳定性
汽车侧向稳定性系数
翻车和侧滑相比,翻车导致的后果更为严重。
因此,为使行车安全,应使侧滑发生在侧翻之前,即:
Vφmax<Vβmax
这样汽车一旦侧滑,车速就不可能提高,因而保证不会翻车。
由此推得的结论是:
式中的B/(2hg)称为汽车侧向稳定性系数,它反映了汽车抗侧翻的能力。
该式表明:当侧向稳定性系数大于路面附着系数时,汽车侧翻不可能发生。
因此,汽车的轮距越大,质心高度越低,侧向稳定性系数越大,则汽车抗侧翻的稳定性就越好。
2. 侧向稳定性标准
GB7258-2004《机动车运行安全技术条件》中规定:车辆在空载、静态状态下,向左侧和右侧倾斜最大侧倾稳定角,双层客车不允许小于28°;总质量为车辆整备质量的1.2以下的车辆不允许小于30°;卧铺客车不允许小于32°。
在国外,有的国家对轿车的抗侧翻能力,规定了检验的高标准和低要求。
高标准是指在平坦的水泥或沥青路面的场地上,以任意的行驶速度和转向组合操纵,都不得翻车。
低要求是:在平坦坚实的场地上,以50km/h和80km/h的车速行驶,以500度/秒的角速度把转向盘转过180°,不得翻车;在平坦的水泥或沥青路面的场地上,成一直线布置11根标杆,间距为30m,汽车以72km/h的车速绕杆行驶,不得翻车。
二、纵向稳定性
纵向稳定性是指汽车上坡或下坡时,汽车抵抗绕后轴或前轴翻车的能力。
当道路的纵向坡度角较大时,汽车重力沿纵向坡道的分力可能导致汽车的纵翻。
研究分析表明,汽车等速行驶时,上坡比下坡更容易纵翻;上坡行驶时,后轮驱动的汽车更容易纵翻。
因此,下面以4×2后轮驱动汽车等速上坡为例说明汽车不产生纵翻的条件。
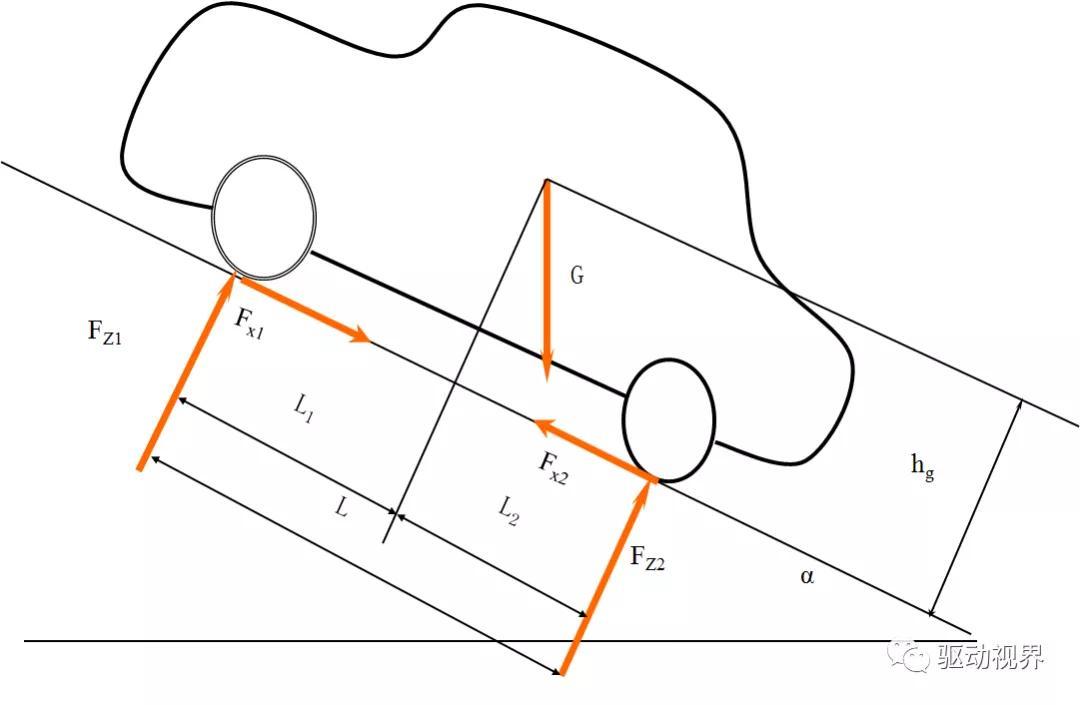
1.汽车上坡时的受力分析
后轮驱动、匀速上坡、令Fw=0,Mf=0
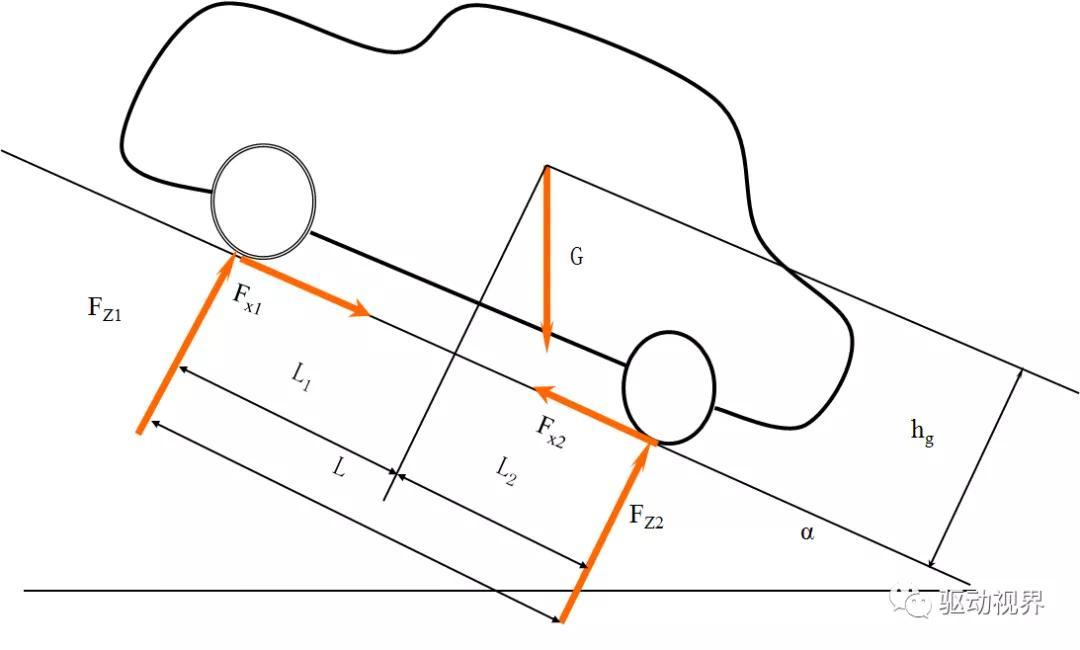
2.汽车匀速上坡不翻车的最大坡度角αmax
当FZ1=0时,失去转向能力,并可能产生纵向翻倒。
由FZ1=(L2Gcosα-hgGsinα)/L,令FZ1=0,解得:
tgαmax=L2/hg
利用汽车总重力通过后轮与地接触点也可得上述结论。
为不致纵翻,路面纵向坡度角:
α<arctg(L2/hg)
由上式知:L2↑,hg↓,αmax则越大,越不易纵翻。
3.考虑后轮滑转情况
设后轮刚发生滑转的的道路坡度角为αφmax
由受力图知:FZ2=(L1Gcosα hgGsinαφmax)/L
FX2=FZ2φ=Gsinαφmax
联立解得:tgαφmax=φL1/(L-φhg)
4.保证纵向稳定性条件(后轮驱动)
滑转应在纵翻之前发生,即:
tgαφmax<tgαmax
φL1/(L-φhg)<L2/hg
∴φ<L2/hg
正常装载情况下,上式能满足。
下述情况应注意:
装运重心高的货物。hg↑
装点太靠后,使L2↓
路面条件差,纵向坡度角较大。
一般汽车因L1>L2,故下坡时纵翻的危险性较小。
3. 轮胎侧偏特性
轮胎的侧偏特性主要是指侧偏力、回正力矩与侧偏角的关系,它是研究汽车操纵稳定性的理论基础和出发点。
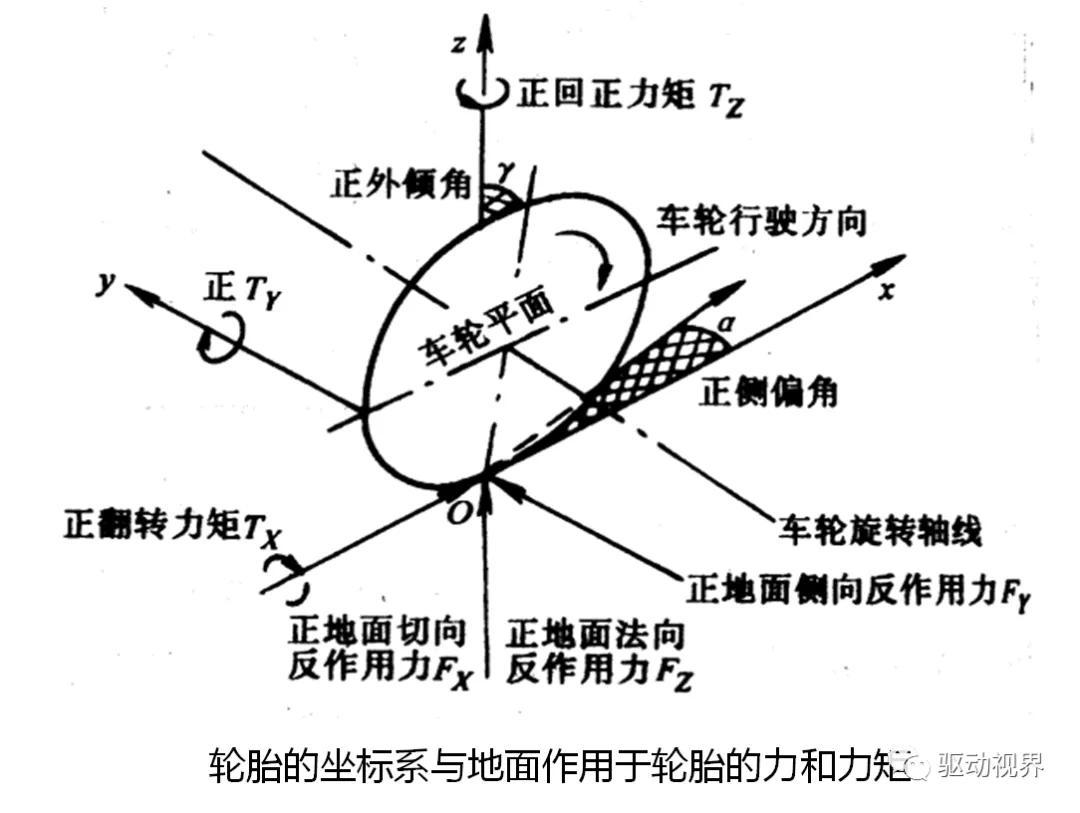
一、轮胎坐标系
二、轮胎的侧偏现象


三、轮胎的侧偏特性
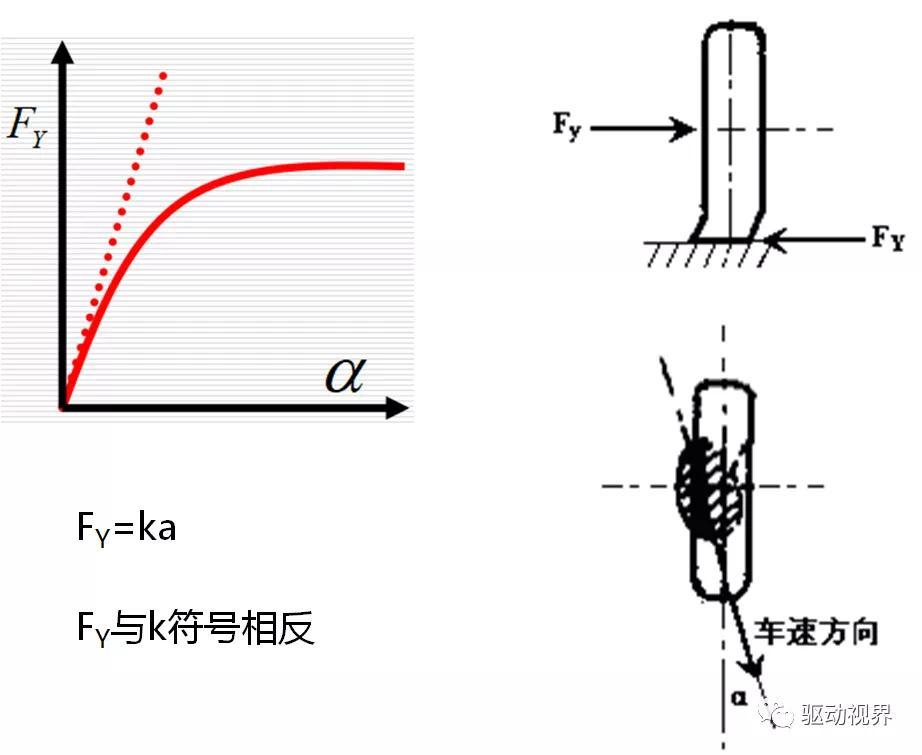
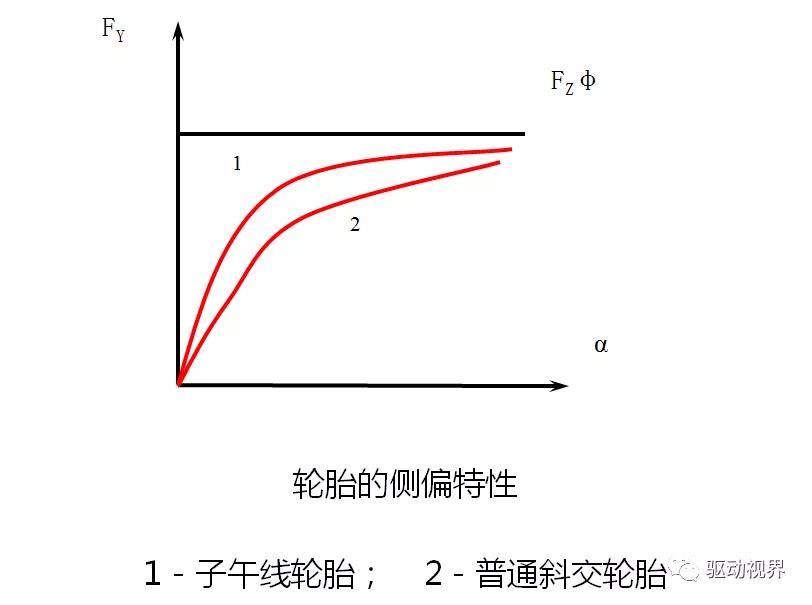
侧偏力FY和侧偏角α的关系曲线,称为轮胎的侧偏特性。
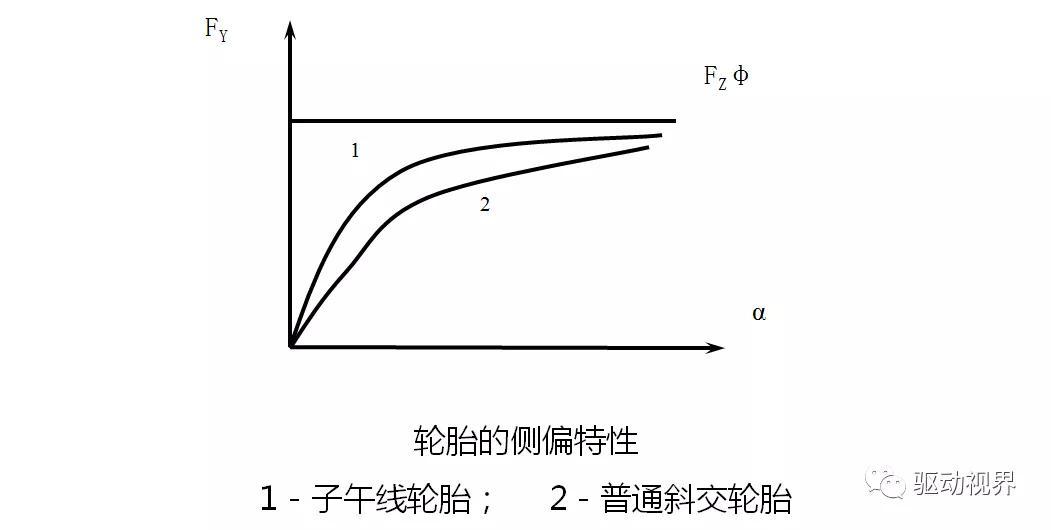
轮胎的侧偏特性
在侧偏角不超过可4°~5°时,侧偏力FY与侧偏角α成线性关系,可由下式表示:
FY=ka k=-28~-80KN/rad
式中 k—侧偏刚度,由轮胎坐标系有关符号规定可知,负的侧偏力产生正的侧偏角,故k为负值,其单位为N/(°)或N/rad,它表示轮胎侧偏一度或一弧度所需的侧偏力。
α通常在3°以内,一般不超过5°。
四、轮胎结构、工作条件对侧偏特性的影响
半径尺寸↑的轮胎,k(绝对值,下同) ↑ ;
子午线轮胎接地面宽,k大;
钢丝轮胎比尼龙轮胎k大;
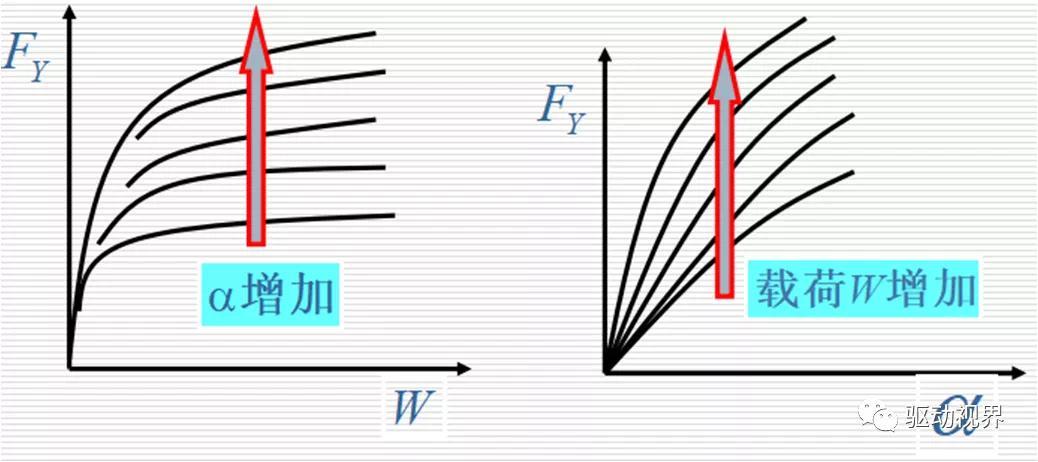
扁平率:轮胎断面高度与断面宽度之比H/B ↓, k ↑ ,如图;
在一定范围内,载荷↑(FZ ↑ ) ,k ↑,如图 。但载荷↑太大时,k↓;
轮胎充气压力↑ ,k ↑ ,如图;
考虑轮胎切向力作用时,其侧偏特性如图;
潮湿特别在积水时,k↓很大。
五、影响侧偏刚度的因素
轮胎的侧偏刚度是决定操纵稳定性的重要轮胎参数,轮胎应有较高的侧偏刚度,以保证汽车良好的操纵稳定性。
轮胎的结构型式、轮胎气压、垂直载荷对其侧偏刚度影响较大。
尺寸较大的轮胎,承载能力大,k(绝对值,下同)较大;
宽系列轮胎,有较大的接地面积,k 较大,采用宽系列轮胎,是目前提高 k 主要措施;
子午线轮胎接地面宽,k值比普通斜交轮胎大;
垂直载荷大,变形大,接触面大,轮胎局部侧滑倾向减少,相当于k 增大,但载荷超过150%额定载荷时,轮胎与地面接触区的压力变得极不均匀,反而使 k 减小;
轮胎气压降低,轮胎更富有弹性,k 减小。

一定侧偏角下,驱动力或制动力增加时,侧偏力逐渐有所减小,这是由于轮胎侧向弹性有所改变的关系。
当纵向力相当大时,侧偏力显著下降,接近附着极限时,切向力已耗去大部分附着力,而侧向力能利用的附着力很小。

六、汽车转向运动学
为了反映弹性轮胎侧偏时对汽车转向运动的影响,有必要比较刚性车轮和弹性车轮转向时的几何关系。
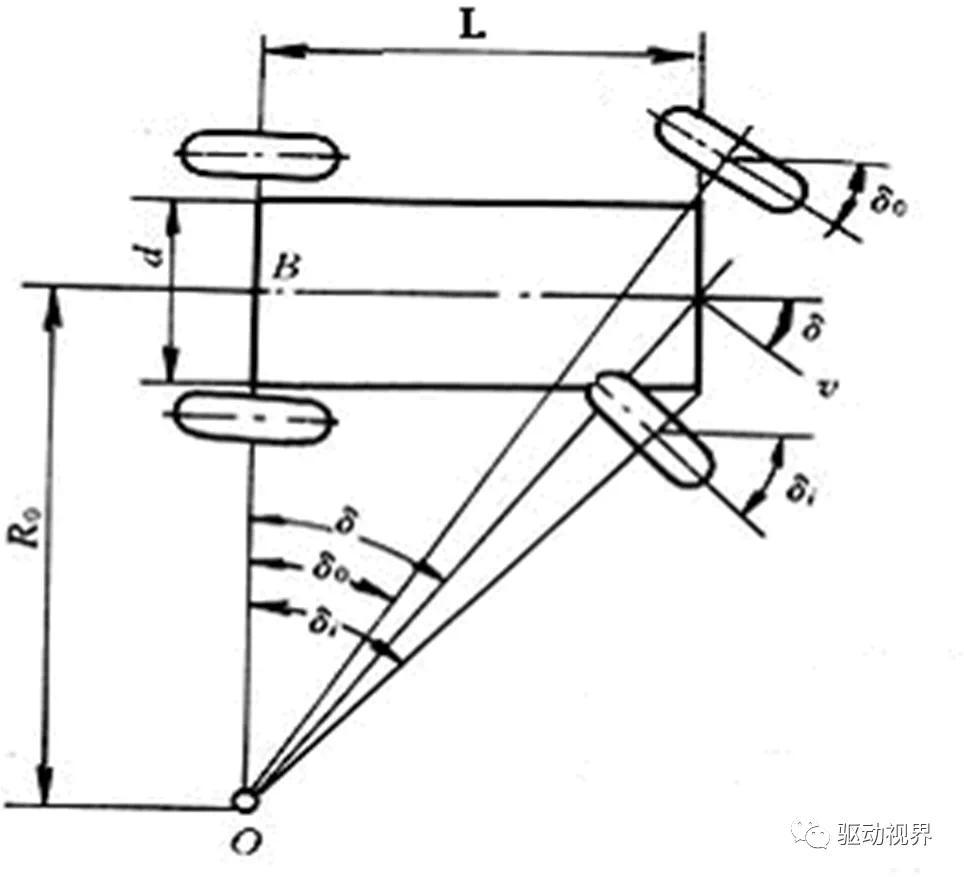
1. 刚性车轮转向几何关系
根据图中的转向几何关系可推得:
R0=L/tanδ
当前轮转角不大时,tanδ≈δ,δ用弧度表示,于是上式可写成:
R0=L/δ
2.弹性车轮转向几何关系
弹性车轮汽车转向运动如图。
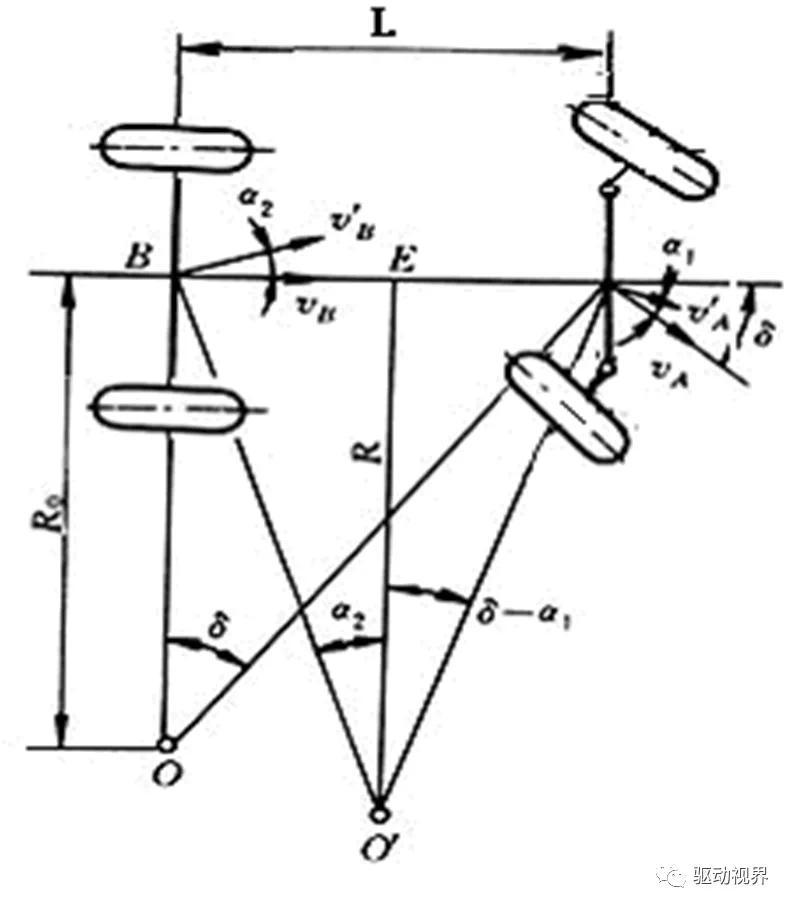
设前轮转过δ角后作稳态等速圆周行驶,在离心力作用下,前后车轮均受到侧向力的作用,其弹性车轮产生了侧偏现象,前、后轴车轮产生的侧偏角为α1、α2,相应的速度方向变为VA′、VB′,转向瞬心变为O′,转向半径变为R, 根据图中的转向几何关系可推得:
R=L/[tan(δ-α1) tanα2]
当转角不大(高速行驶δ不大)时,
tan(δ-α1) tanα2≈δ-α1+α2,
则有: R=L/[δ-(α1-α2)]
结论:弹性车轮汽车处于转向运动状态时,由于轮胎的侧偏现象,使汽车的运动轨迹不同于刚性车轮。
4. 汽车的操纵特性
一、线性二自由度汽车模型的运动微分方程
忽略转向系的影响,直接以前轮转角作为输入;
汽车只进行平行于地面的平面运动,而忽略悬架的作用;
汽车前进(纵轴)速度不变,只有沿y轴的侧向速度和绕z轴的横摆运动(ay<0.4g);
驱动力不大,对侧偏特性无影响;
忽略空气阻力;
忽略左右轮胎因载荷变化引起轮胎特性的变化;
忽略回正力矩的变化。
转向运动分析
汽车的质量分布参数对于固结于汽车的动坐标系是常数,因而可利用该坐标系列出其坐标轴方向的微分方程

运动时的速度变化量
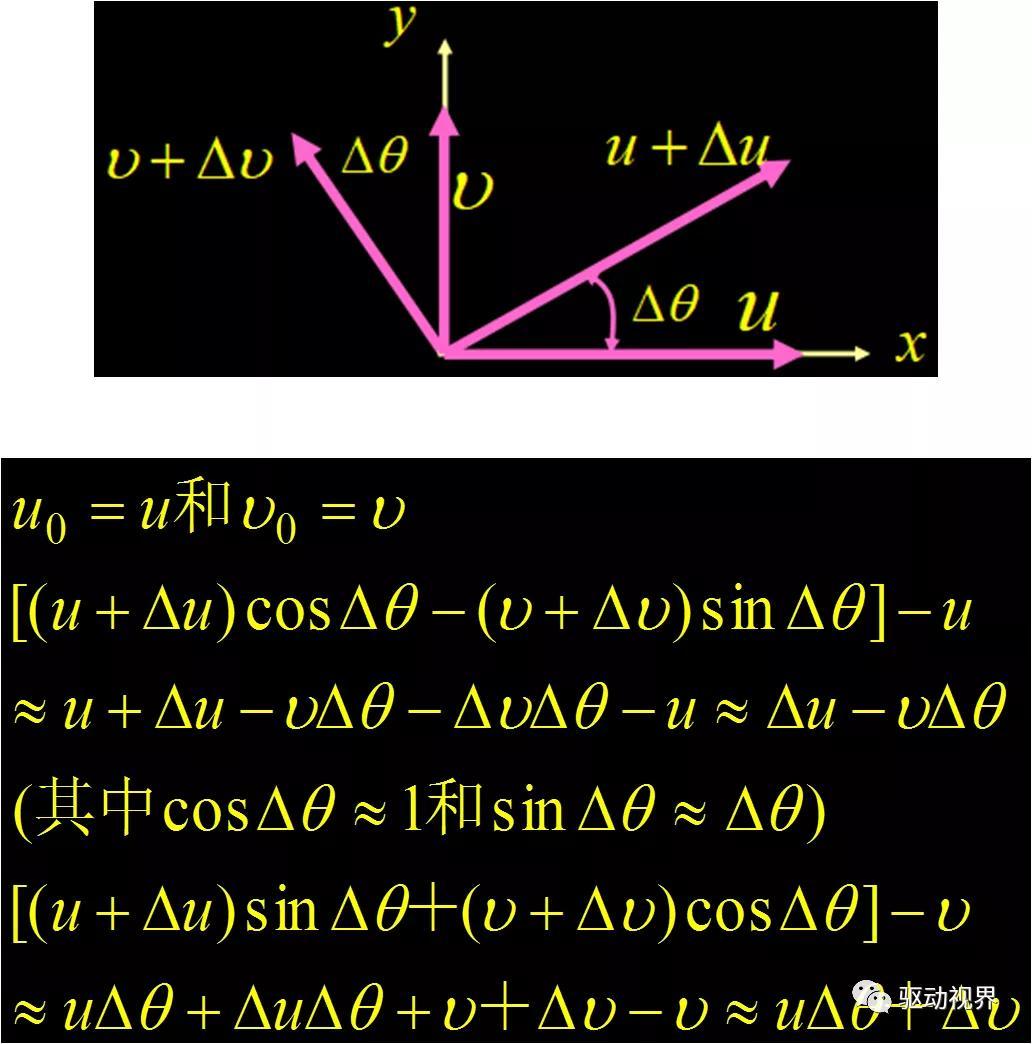
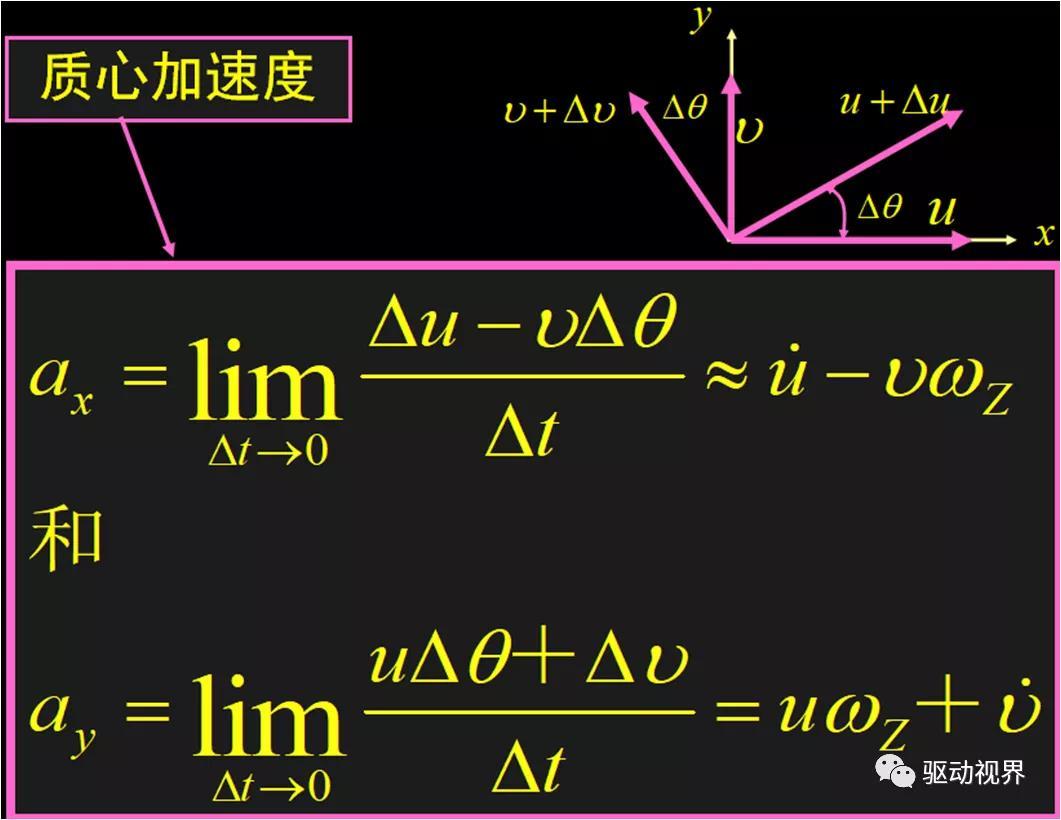
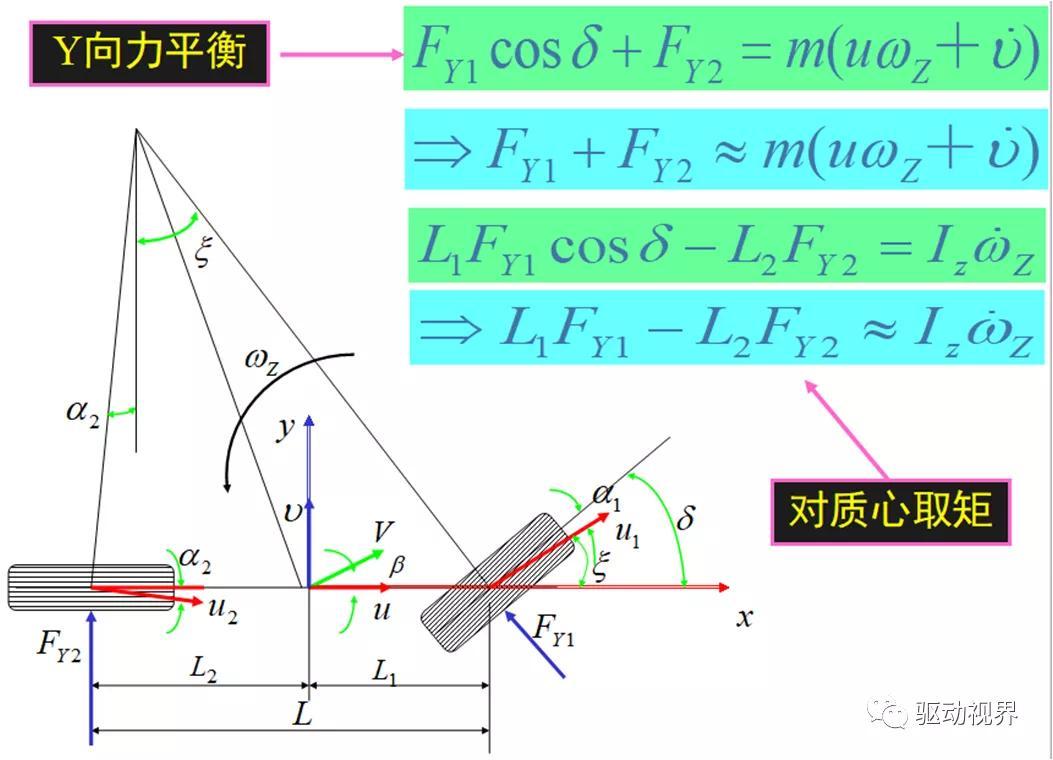
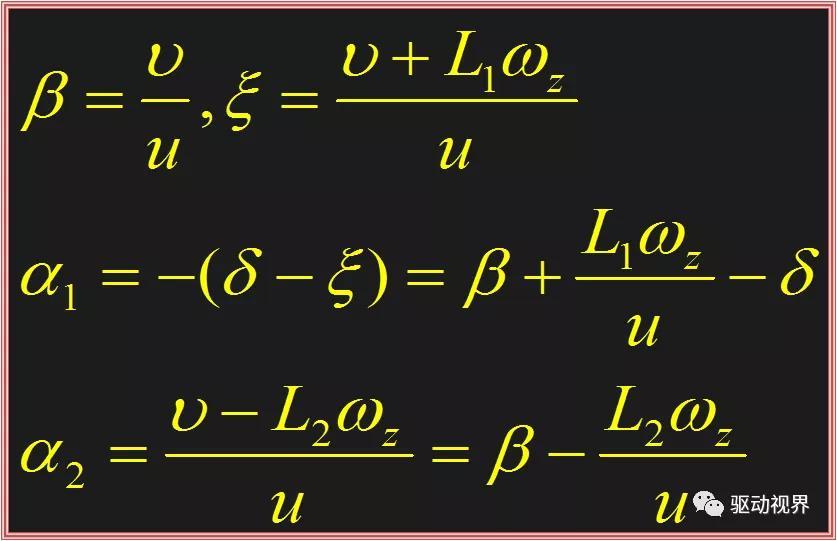

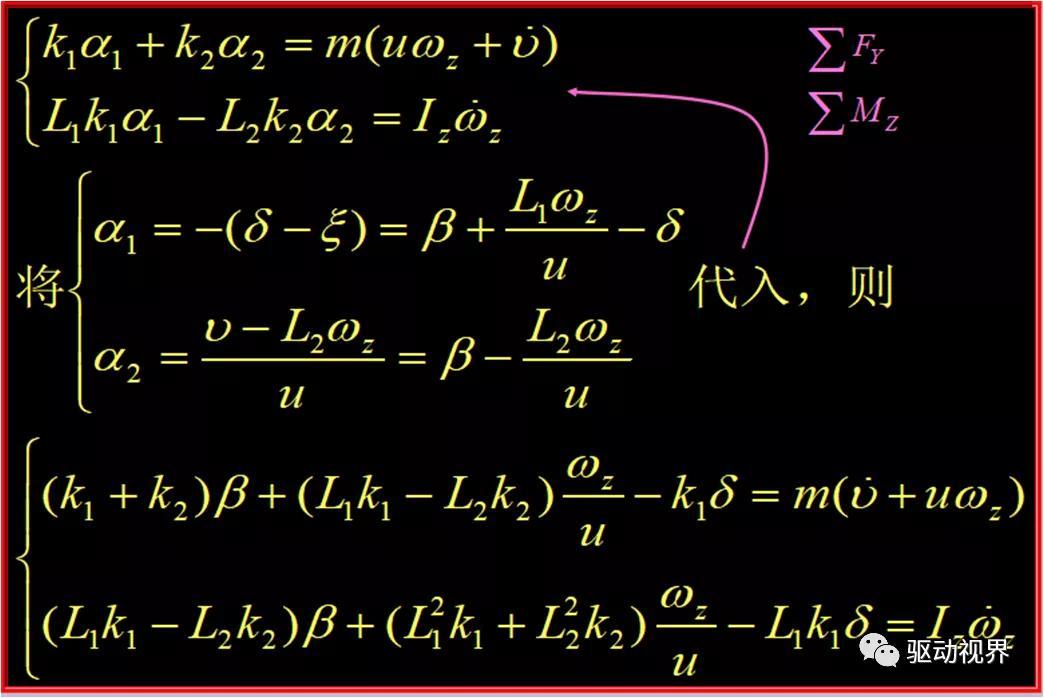
运动微分方程
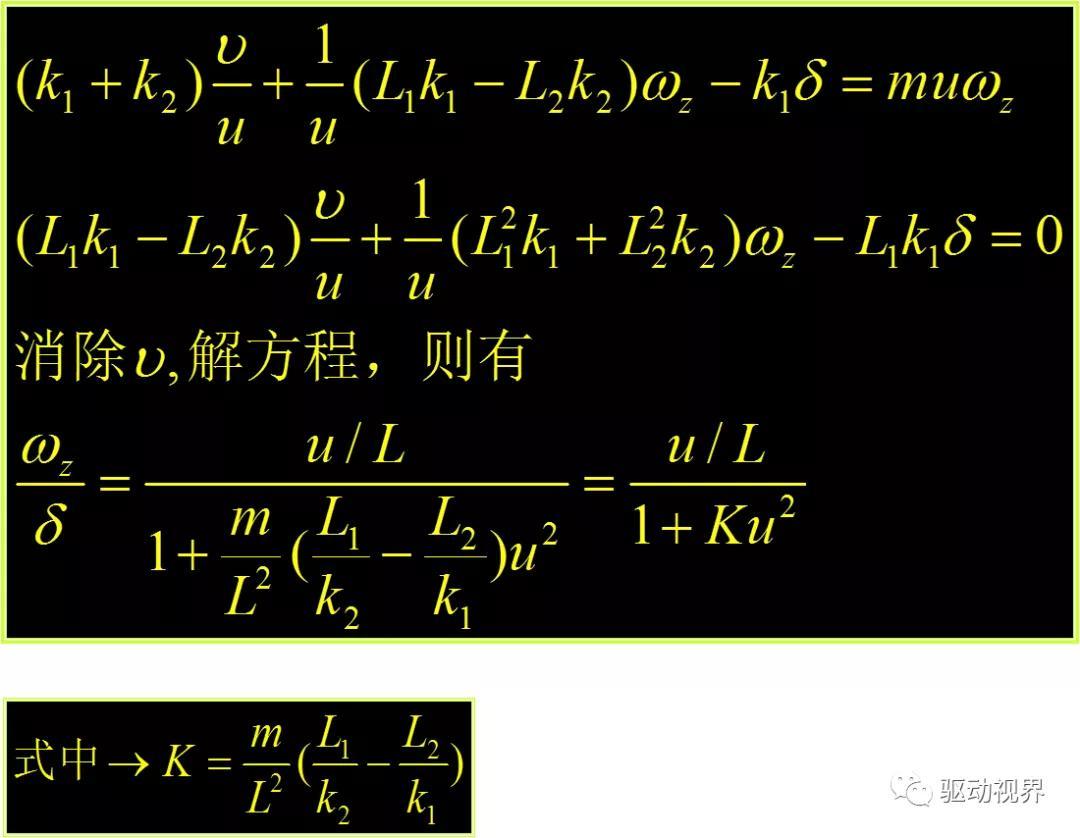
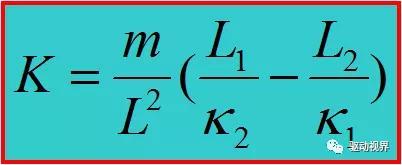
2. 稳定性因数
K — 称为稳定性因数(s2/m2)。
稳定性因数K是表征汽车稳态转向特性的一个重要参数,它把汽车结构参数m、L、L1、L2、k1、k2与稳态转向特性定量地联系起来,以便从设计上保证汽车具有适当的转向特性。
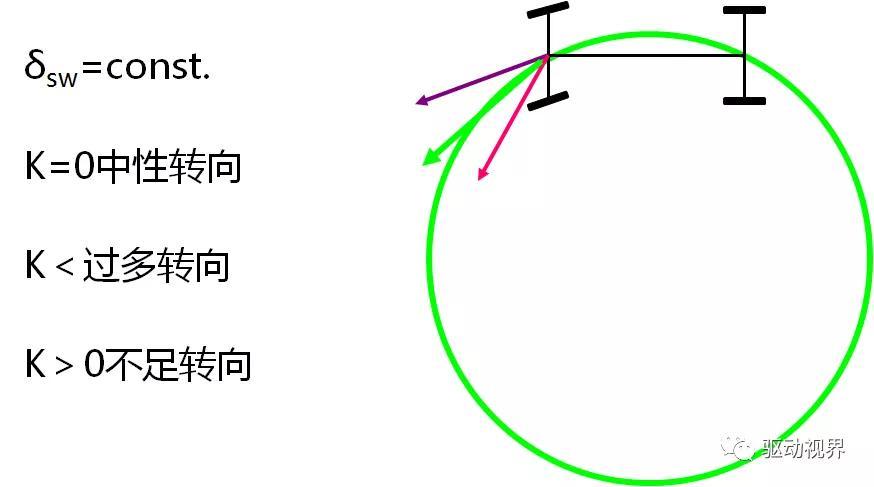
3. 稳态响应的三种类型
常用稳定性因数K作为表征汽车稳态转向特性的参数
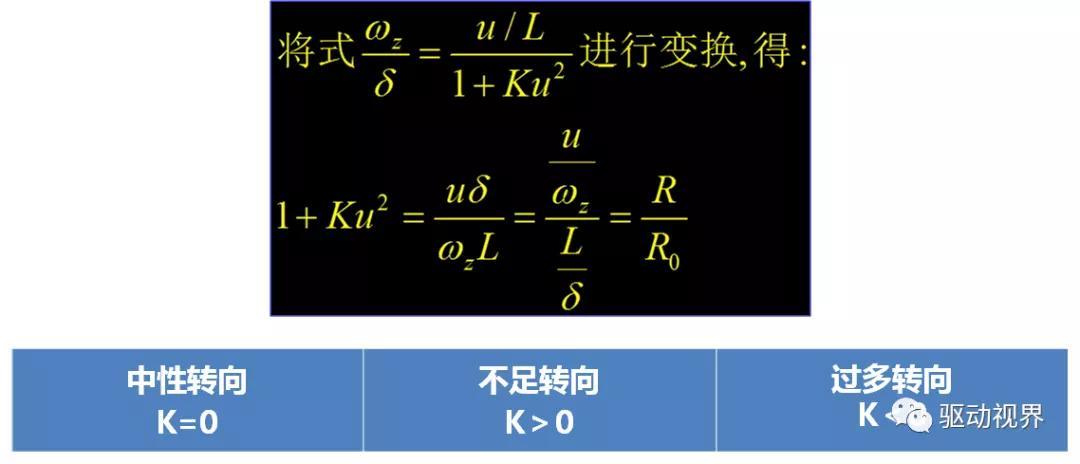
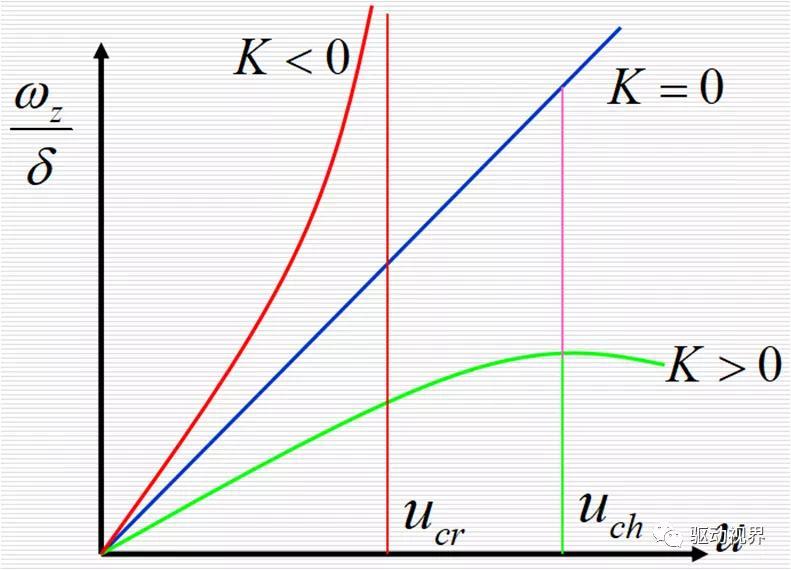
(1)中性转向
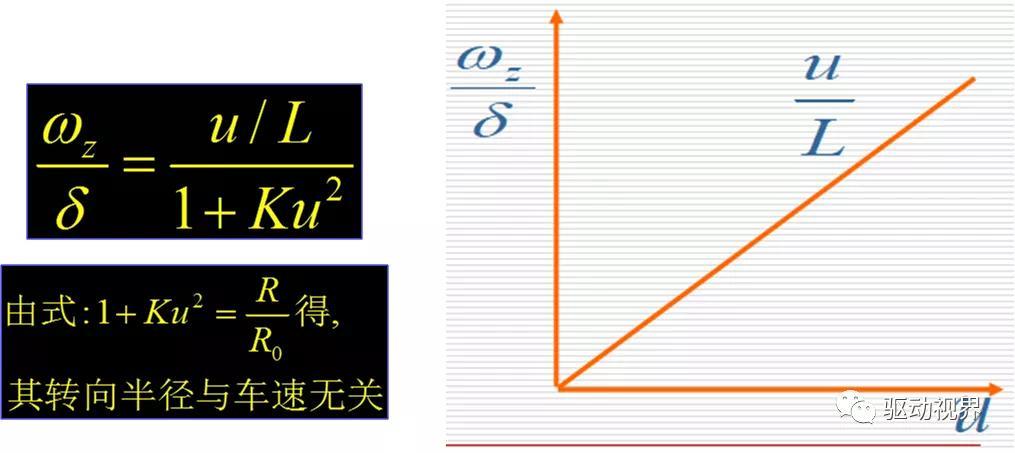
若K=0,则R= R0,汽车转向半径R和刚性车轮转向半径R0相同,汽车具有中性转向特性。
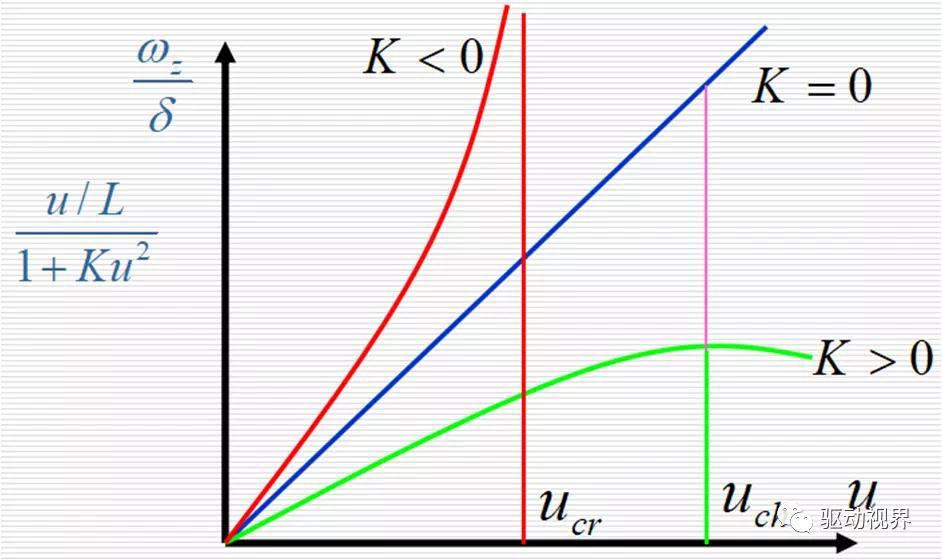
中性转向特性汽车的转向灵敏度与车速的变化关系曲线,如图所示。
(2)不足转向
若K>0,则R>R0,汽车具有不足转向特性,K值越大,不足转向量越大。当δ一定时,随着车速↑其R↑。
转向灵敏度比中性转向汽车的小。
特征车速
不足转向汽车转向灵敏度达到最大值时所对应的车速。
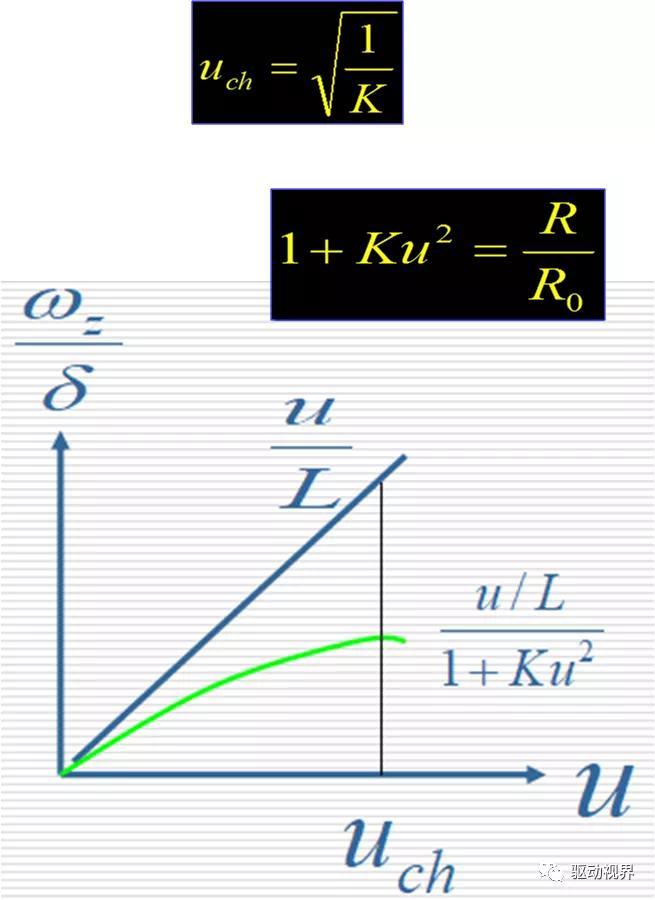
(3)过多转向
若K<0,则R<R0,汽车具有过多转向特性,K的绝对值越大, 过多转向量越大。当δ一定时,随着车速↑其R↓。
转向灵敏度比中性转向汽车的大。
临界车速
过多转向汽车转向灵敏度趋于无穷大时所对应的车速。

过多转向
过多转向汽车车速达到临界车速时将失去稳定性。因为只要一个很小的转角δ,横摆角速度增益ωz/ δ就趋于无穷大。
过多转向汽车在临界车速下行驶时,很小的转角δ,就意味着汽车的转向半径极小,这样汽车必定发生激转而发生侧滑或侧翻。
例题
例:某轿车重20.105千牛顿,轴距L=3.2米,前轴轴荷占53.5%,后轴轴荷占46.5%。
1)如果每个前轮胎的侧偏刚度为-38.92千牛顿/弧度、后轮胎的侧偏刚度为38.25千牛顿/弧度,试确定该车的稳态转向特性及特征车速或临界车速。
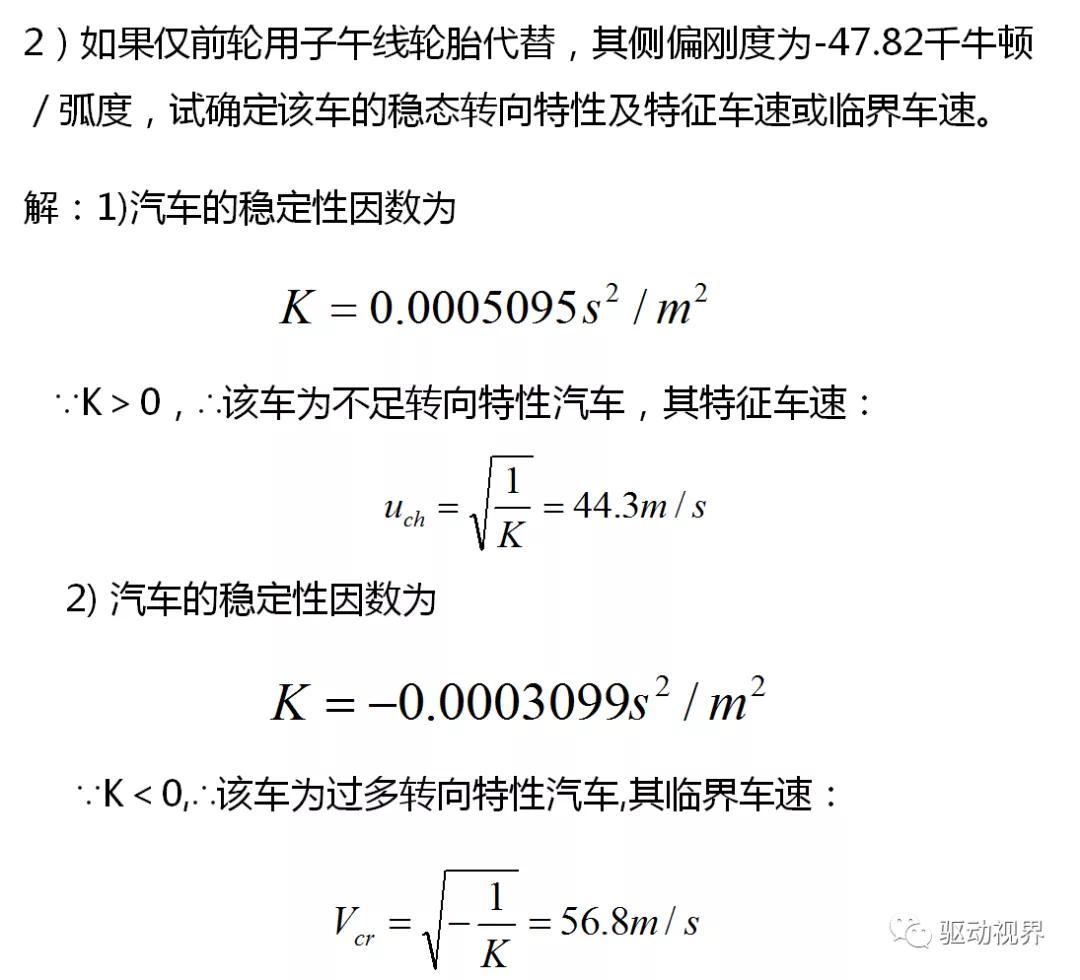
三、表征汽车稳态转向特性的其他参数
1. 用α1-α2差值表征

α1-α2=0,说明R=R0,汽车具有中性转向特性。
α1-α2>0,说明R>R0,汽车具有不足转向特性。
α1-α2<0,说明R<R0,汽车具有过多转向特性。
2.用转向半径比值表征
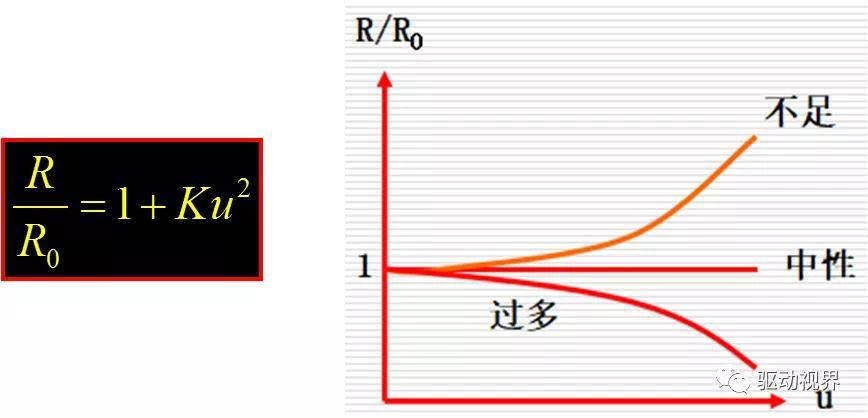
R/R0=1 ,中性转向。
R/R0>1,不足转向,u↑,R/R0↑。
R/R0<1,过多转向,u↑,R/R0↓。
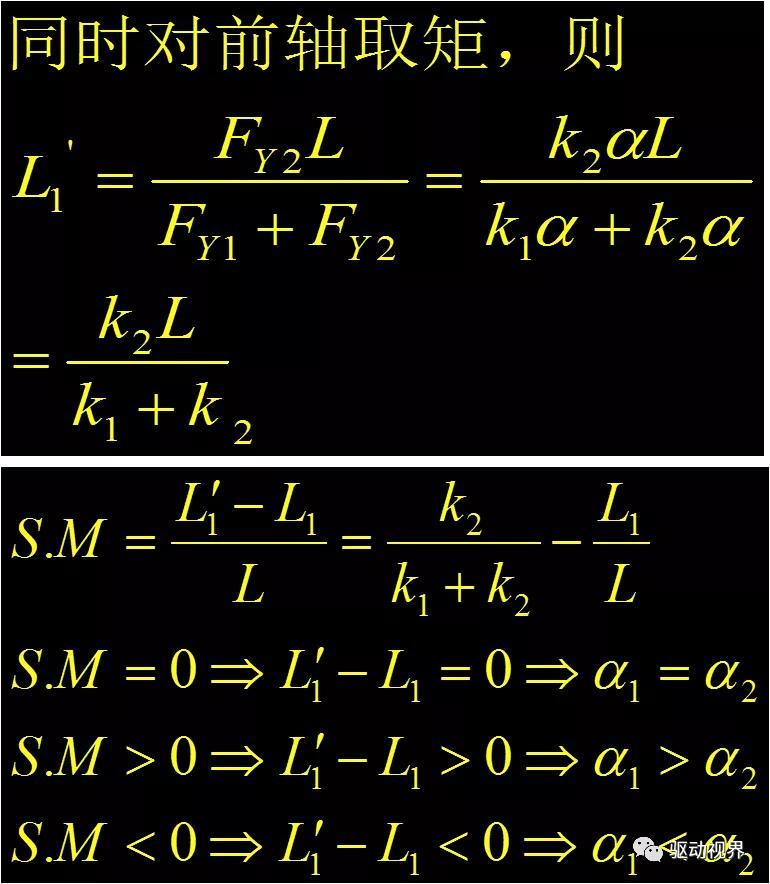
3.用静态储备系数S.M表征
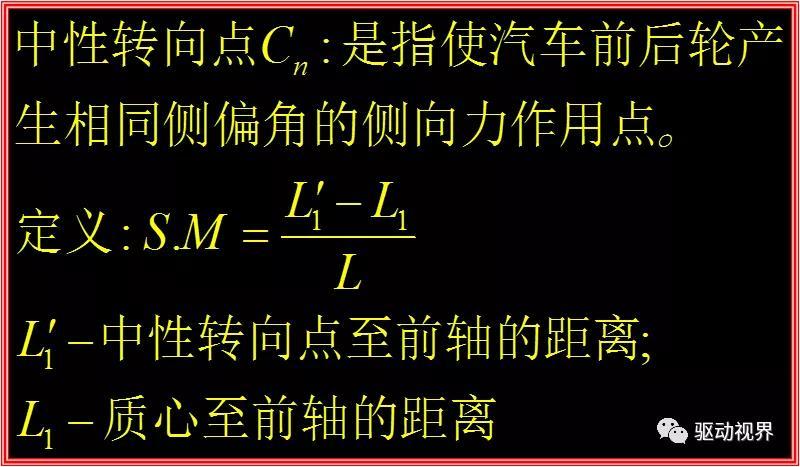
静态储备系数S.M

四、转向特性对汽车操纵稳定性的影响
1. 转向稳定性
过多转向汽车车速达到临界车速时将失去稳定性。因为只要一个很小的转角δ,横摆角速度增益ωz/ δ就趋于无穷大,必将导致汽车急转而发生侧滑或侧翻。
不足转向汽车稳定性好,但转向灵敏性差,在相同的弯道行驶时,前轮的转角较大,驾驶者应多转一下转向盘。
中性转向汽车趋于两者之间,但有向过多转向变化的危险。
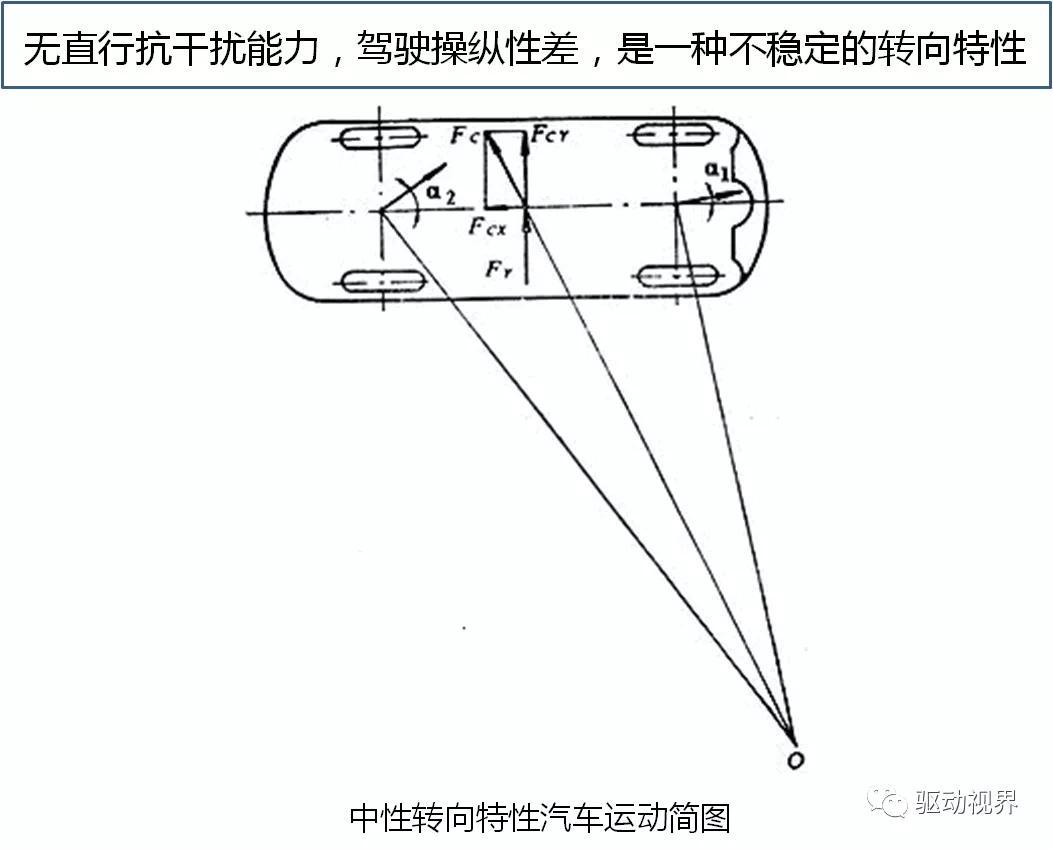
2. 直行抗干扰能力
中性转向
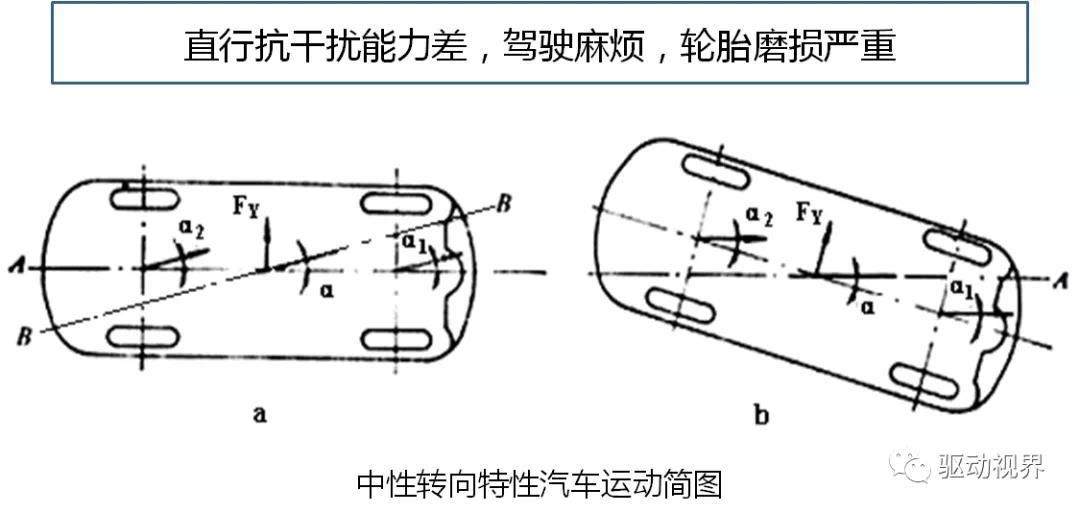
过多转向
不足转向

结 论
不足转向特性的汽车具有良好的操纵稳定性,所以现代汽车都采用不足转向特性。
人们已习惯于驾驶具有不足转向特性的汽车,知道如何控制转向盘使汽车遵循期望的路径行驶。
若汽车的转向特性因使用因素的变化而突然发生改变,由于驾驶者的经验不适应新的、不良的转向特性,则转弯时就有可能出现汽车失控而造成事故。
五、影响转向特性的因素
1.汽车质量分配与车轮侧偏刚度的匹配
2. 轮胎气压的变化
轮胎充气压力 ↑ ,k的绝对值↑。
因此前轮胎充气压力 ↑,则汽车趋于过多转向特性。
同理可分析前后轮胎充气压力变化对转向特性的影响。
影响转向特性的因素
3. 轮胎结构的不同
宽系列轮胎
子午线轮胎
轮胎的结构不能随意更换
4.汽车的驱动型式
转向时施加于驱动轮上的切向力增加,车轮的侧偏刚度将下降。
因此,后轮驱动车辆,转向时有减少不足转向特性、向过多转向特性变化的趋势;前轮驱动车辆,转向时有增加不足转向特性的趋势。
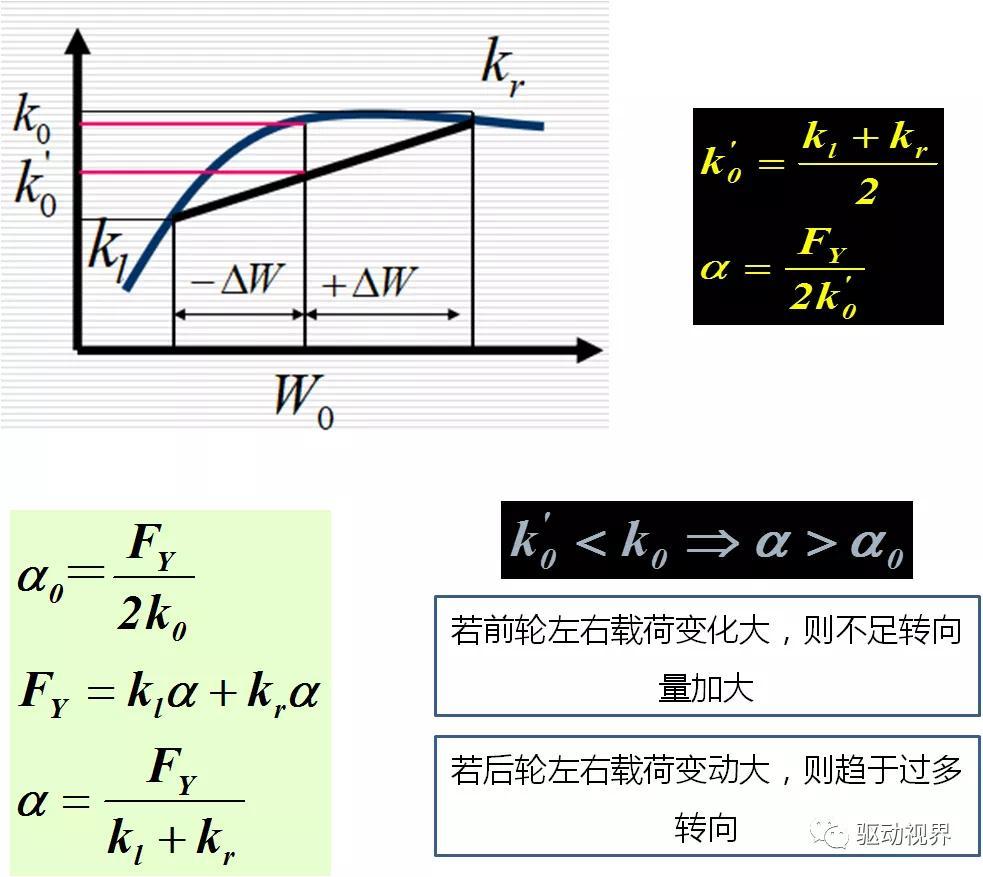
5.左、右轮垂直载荷再分配
注意!!!
在侧倾力矩的作用下,汽车左右车轮的垂直载荷发生变化,这将导致轮胎的侧偏特性变化而使汽车稳态转向特性发生变化。
左右车轮垂直载荷差别越大,侧偏刚度越小。
若前轴左右车轮的垂直载荷变化大,则趋于不足转向。后轴左右车轮的垂直载荷变化大,则为趋于过多转向。
车轮左右载荷的变动取决于:侧倾角刚度、质心位置等。
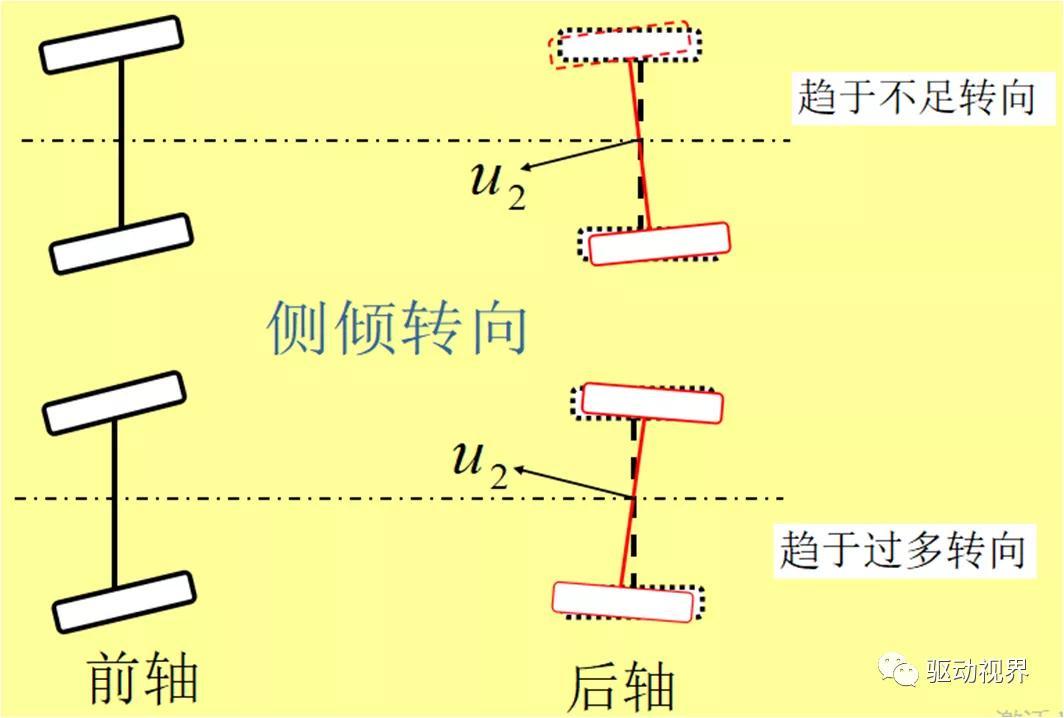
6.侧倾转向
侧倾转向: 是在侧向力作用下,车厢发生侧倾,而引起车轮偏转,即车轮围绕垂直轴线或转向节主销转动。
也称轴转向: 发生侧倾转向时,车轴发生绕垂直轴线的转动。
也称运动学侧偏: 车轴和车轮围绕垂直轴线的转动与轮胎侧偏之效果一样。
后轴的轴转向对稳态转向特性的影响
在侧倾作用下板簧悬架的轴转向
7. 侧倾时车轮外倾角变化
车身倾斜时,由于悬架形式不同,车轮外倾角会发生变化,使轮心前进方向发生变化,这与轮胎侧偏具有相同的效果,可使汽车的转向特性发生变化。
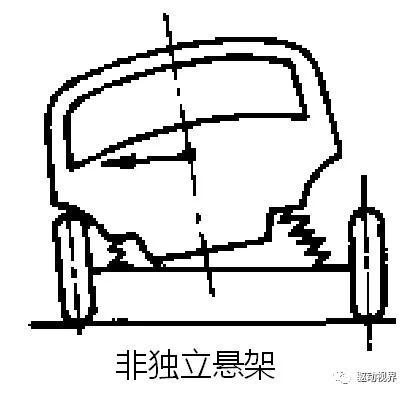
车厢侧倾时,因悬架形式不同,对车轮的倾斜有不同的影响。
车厢侧倾时,车轮倾斜有三种情况。
保持外倾角不变,如非独立悬架,无影响
沿侧向力方向倾斜,侧偏角↑。如单纵臂式(富康轿车后悬架)、双横臂式,烛式悬架(一般轿车的前悬架)。
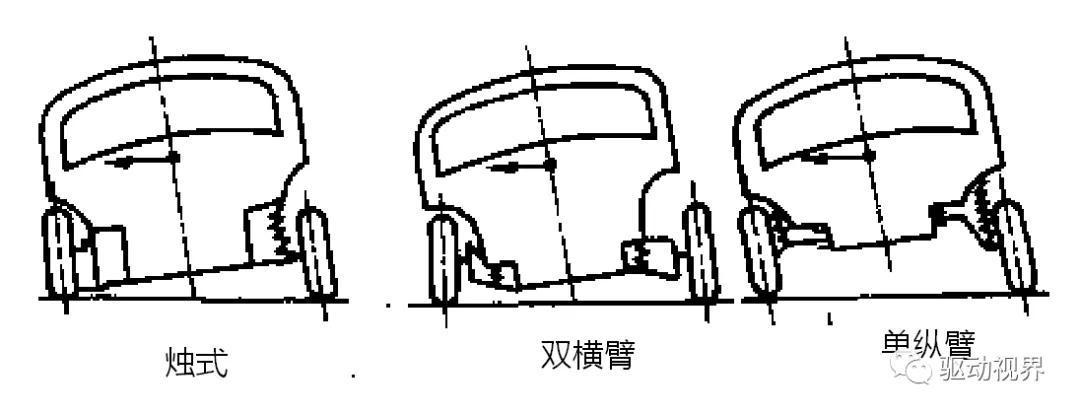
沿侧向力相反方向倾斜,侧偏角↓。如单横臂式悬架(小向心加速度)。

因此,车身倾斜时,对汽车的转向特性有一定的影响。
正常情况下,车轮倾斜5~6°将使轮胎侧偏角改变1°。
为了获得良好的汽车操纵稳定性,前后悬架的形式应合适。
5. 转向轮的摆振与稳定
一、转向轮的振动
1.现象
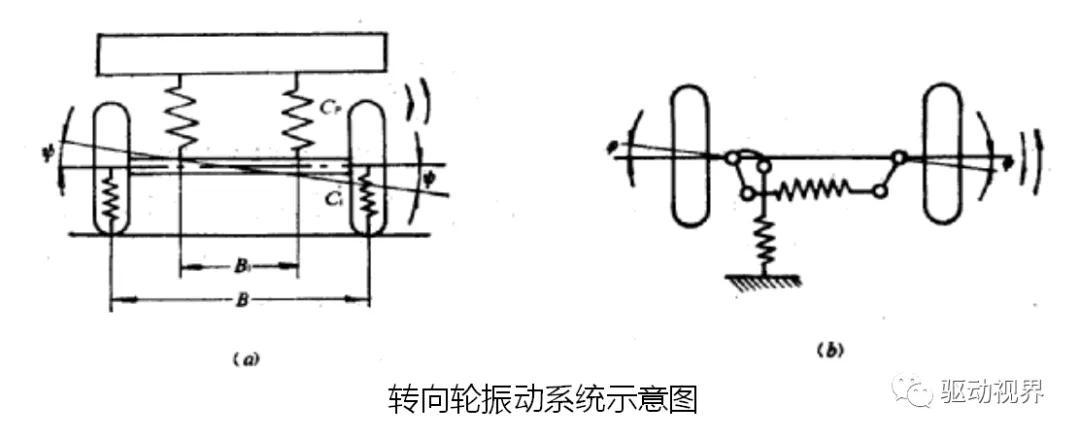
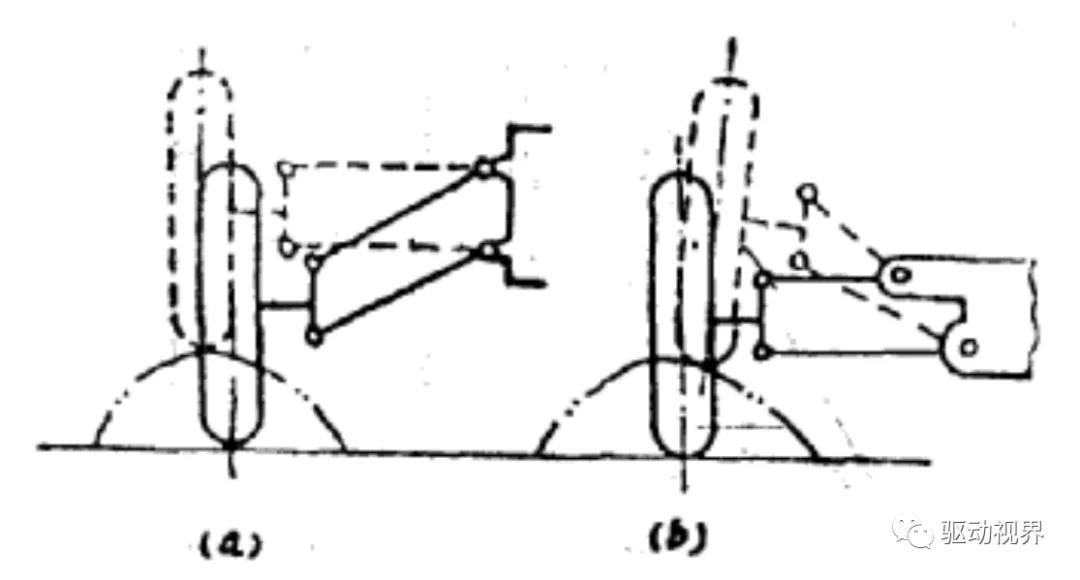
1)转向轮绕主销振动:方向盘居中时,转向轮绕主销摆振,如图b。
2)角振动:汽车前轴在垂直的横向平面内产生角振动a,即左、右车轮上、下跳动,甚至使其跳离地面。
转向轮的这两种振动形式,即前轮的上下跳动和绕主销的摆动,两者彼此不是孤立的,它们之间存在着回转联系。
2.结果
1)高速时汽车蛇形前进,严重时驾驶员无法扶稳激烈摆动的方向盘。
2)转向轮的振动使轮胎磨损急剧增加,并增加了转向机构的动载荷,降低零件的使用寿命。
3)转向轮的振动严重地影响了汽车的行驶安全。
为避免转向轮振动产生的不良后果,驾驶员被迫降低行驶速度,因而使汽车的运输生产率降低。
二、转向轮摆振的原因
1.前轴角振动引起转向轮摆振
行驶中,车轮受路面不平的冲击,前轴在垂直的横向平面内产生角振动,在某一车速下,来自路面不平的冲击频率与前轴角振动的固有频率接近时,发生共振,严重时,一边的车轮可以跳离地面。
前轴角振动使具有较大转动惯量的车轮旋转平面的方位改变(不含车轮旋转平面的平移),由于陀螺仪效应的影响,引起转向轮在水平平面内绕主销左右摆振。
1)陀螺仪效应的原理
陀螺仪效应的原理图如下。
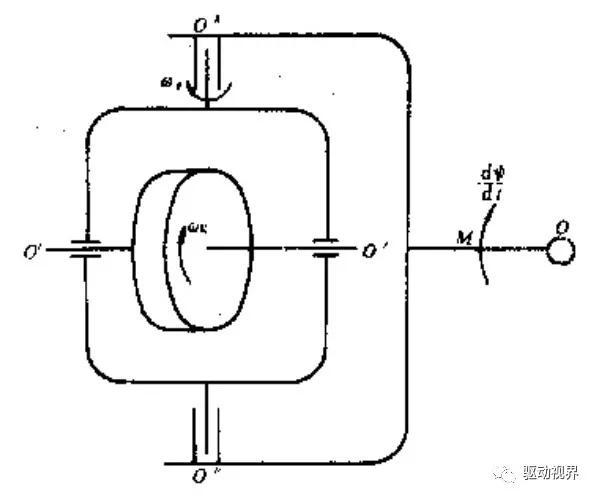
设一外力矩M使仪架在简图平面内绕O点以角速度dψ/dt旋转,由于飞轮平面倾斜,则陀螺仪仪架绕垂直轴O〞O〞以角速度ωφ回转。这个运动称为进动,是在所谓回转力矩Mg的作用下实现的。
其力矩Mg为:
Mg=JKωK·dψ/dt
式中 JK—飞轮的转动惯量,相当于车轮的转动惯量;
ωK—飞轮的角速度;
dψ/dt—飞轮侧倾的角速度,相当于车轮角振动的角速度。
飞轮侧倾的角速度dψ/dt及飞轮的角速度ωK愈大,则回转力矩Mg愈大,陀螺仪仪架的进动速度亦愈大。
陀螺仪效应的原理
行驶中的汽车转向轮类似陀螺仪。
当路面不平引起车轮上下跳动时,转向轮产生陀螺仪效应,导致转向轮左右摆振,其摆振规律是:左下左,左上右;右下右,右上左。
即如果左前轮向下跳动,该轮会绕主销向左偏转,左前轮向上跳动,该轮会向右偏转;右前轮向下跳动,该轮会向右偏转,右前轮向上跳动,该轮会向左偏转。
这一现象可以从陀螺仪的演示得到证实。
2)消除陀螺仪效应的措施
减少悬架下前轴系统的转动惯量,提高角振动的固有频率。
改善公路状况,保持公路的平整。
适当降低轮胎气压,增加轮胎的吸振能力。
在轿车上,常采用双横臂独立悬架。如采用等长的双横臂独立悬架,在车轮上下跳动时,车轮的旋转平面不会倾斜,因而不产生绕主销的摆振。但是车轮跳动时,轮距的变化较大,这会增加轮胎的磨损,所以目前多采用b图所示的不等长双横臂结构。它是一种折中方案,既可使车轮的旋转平面倾斜较少,又可使轮距变化不大。
2.转向车轮不平衡引起转向轮摆振
1)车轮的静不平衡
若车轮的质心与旋转中心不重合,则该车轮为静不平衡。
静不平衡的车轮在旋转时,由于存在着不平衡质量,因而产生离心力,如图所示。
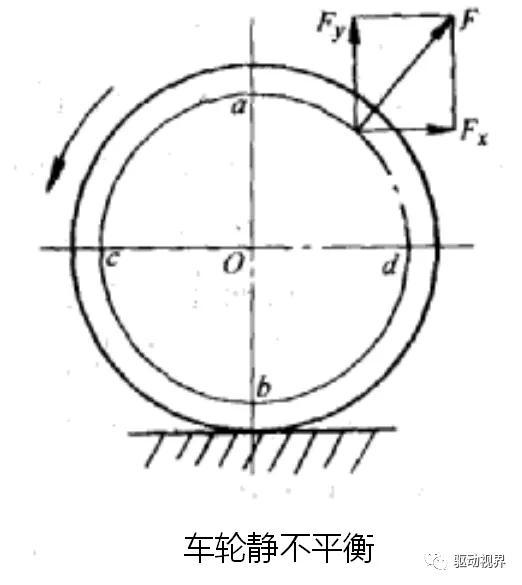
该离心力F可分解为一个水平分力Fx和一个垂直分力Fy。
车轮每转动一周,水平分力Fx在通过车轮旋转中心水平线的c、d两点时达到最大值且方向相反,易引起车轮的前后窜动,它将产生绕主销来回摆动的力矩,造成转向轮摆振。
而垂直分力Fy在通过车轮旋转中心垂直线的a、b两点时达到最大值且方向相反,易引起车轮的上下跳动,它使前轴产生角振动,由于陀螺仪效应它也会引起转向轮摆振。
当左、右转向轮的不平衡质量相互处于180°位置时,转向轮摆振将最为严重。
2)车轮的动不平衡
静平衡的车轮,若车轮的质量分布相对于车轮纵向中心面不对称,则会造成车轮的动不平衡,如下图所示。
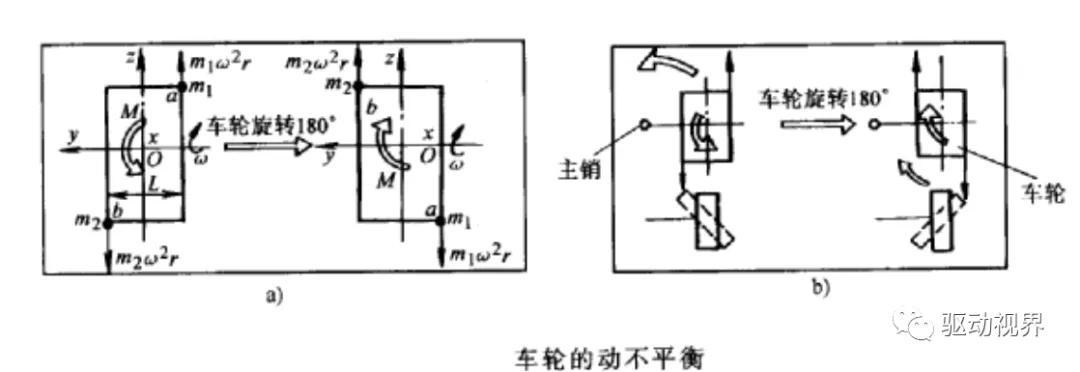
假定点和点上分别具有两个质点m1和m2,其质量相等方位相反,车轮质心与车轮旋转轴心重合,即车轮处于静平衡状态。
当该车轮旋转时,m1和m2将分别产生离心力,虽然其离心力的合力为零,但离心力位于不同平面内,二力构成的合力矩却不为零。
因而,在车轮转动时,由离心力作用而产生的方向反复变动的力偶M,使车轮处于动不平衡中。
若转向轮动不平衡,则车轮转动时,由于M的作用,将会造成车轮绕主销摆振。
3)消除车轮不平衡的措施
车轮应进行动平衡试验(就车或拆下),必要时进行动平衡作业。
选择两边轮辋平面作为平衡平面,根据需要打装适当质量的平衡卡子。
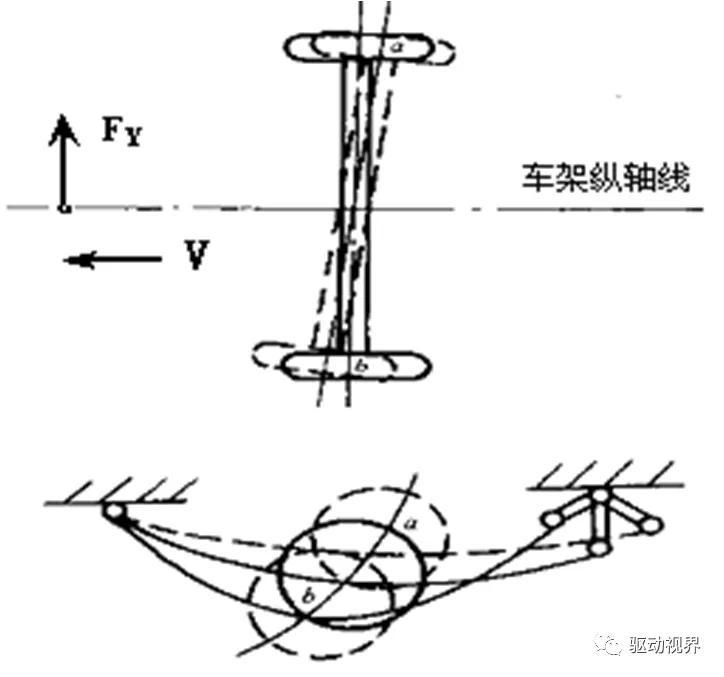
3.前悬架与转向系运动学关系不协调引起的摆振
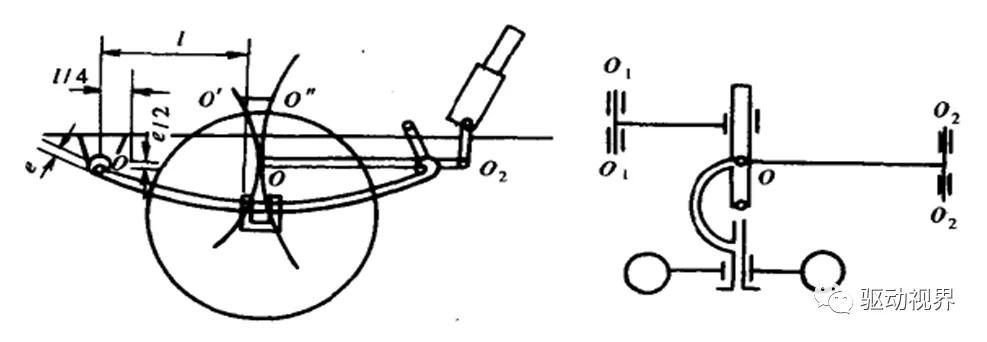
如图所示,当车轮上下跳动时,转向节球销O应绕钢板弹簧固定吊耳的O1点摆动,同时O点只能绕转向器的O2点摆动,由于两摆动的轨迹不重合,因而转向节将相对于主销发生转动,故引起车轮左右摆振。
消除措施:将转向机与钢板弹簧固定吊耳尽量靠近,使两轨迹相重合。
三、转向轮的稳定
存在转向轮摆振的原因,但不一定就造成转向轮摆振。
因为转向轮还存在着稳定效应。
转向轮稳定效应是指转向轮具有保持居中位置(直线行驶位置)及转向后自动返回到中间位置的能力。
转向轮的稳定效应是由稳定力矩来完成的,稳定力矩的作用是阻止车轮偏转并力图使转向轮保持居中位置。
其稳定力矩的大小主要取决于转向轮定位参数及轮胎的侧偏效应。
稳定力矩主要有以下几项。
1.主销内倾时,法向反作用力FZ形成稳定力矩MZβ汽车直行时,FZ与主销轴线在同一平面,此时MZβ=0。
当转向轮绕主销偏转δ角后,FZ与主销轴线不在同一平面,位于空间相错位置,具有力矩TZβ,其方向与车轮偏转方向相反,起阻止车轮偏转的作用,转向时驾驶员必须施加力矩来克服该力矩,转向后该力矩可使车轮具有自动回正的作用。
其MZβ=f(δ,β),δ↑, β↑,MZβ↑,与其他条件无关。
它是汽车低速行驶时起主要作用的稳定力矩。
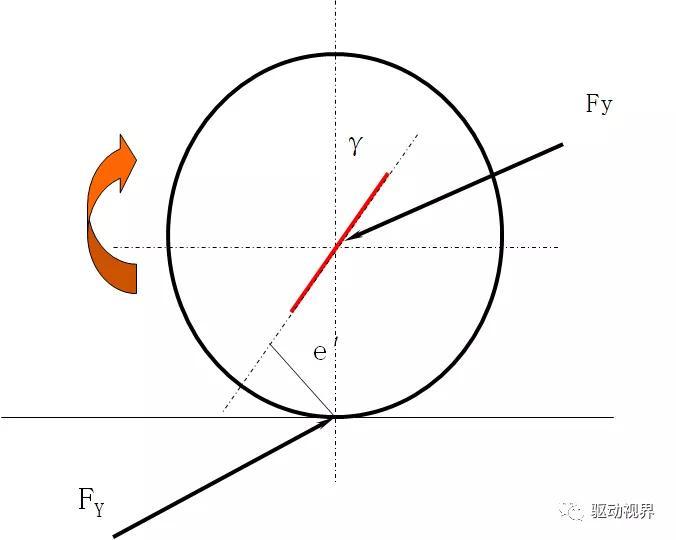
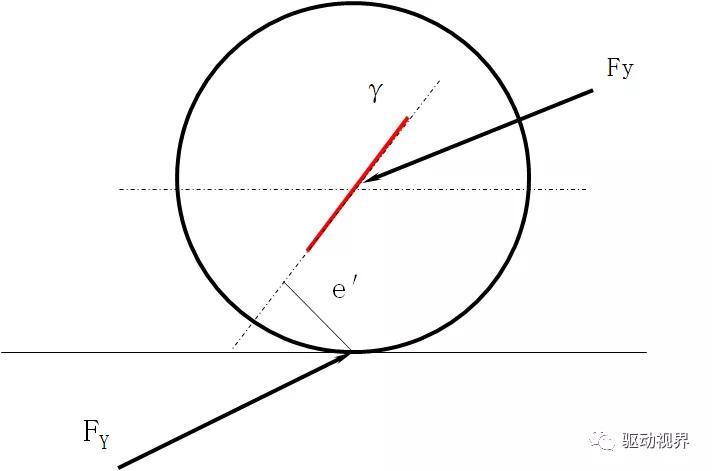
2.主销后倾时,侧向反作用力Fy形成的稳定力矩MYγ
1)作用原理
转向时产生稳定力矩。
图中转向轮向右转动,Y为离心力之侧向分力,FY为侧向反作用力,e′为后倾拖距,其力矩为MYγ=FY·e′,方向与前轮偏转相反,是稳定力矩,转向后撒手,MYγ可使转向轮自动回正。
只要前轮偏转,MYγ就会存在。
稳定力矩MYγ
2)MYγ特点
它与离心力成正比;当转向半径一定时,与V2成正比。低速时, MYγ很小,比MZβ小得多,但在高速时, MYγ很大,比MZβ大得多。
∴ MYγ 主要是在高速时起作用,而MZβ主要在低速时起作用,两者相互补充,在整个车速范围均起作用。
汽车直线行驶时,若汽车受侧向力, MYγ成为非稳定力矩。其力矩将促使转向轮朝侧向力方向偏转。
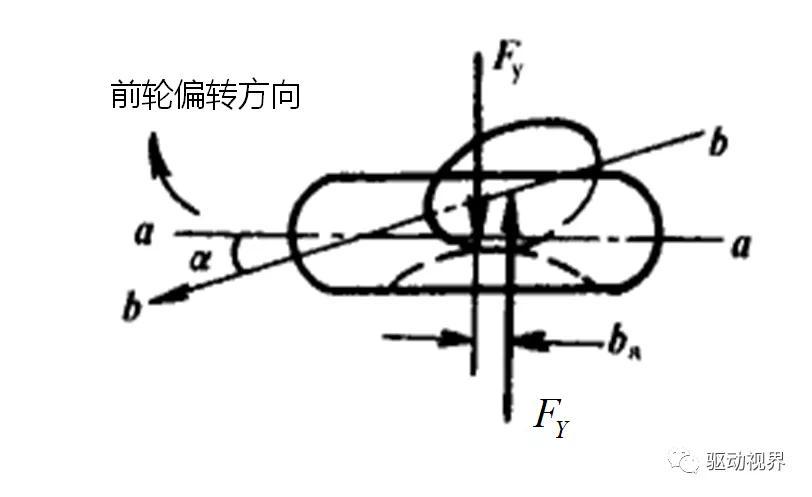
3.侧偏时,侧向反作用力Fy形成的稳定力矩MYα
1)侧偏时稳定力矩MYα 的形成与作用原理
侧偏时轮胎印迹上的侧向反力分布见图,其合力作用点位于印迹中点之后,偏距为ba,其FY·ba即为稳定力矩。
2)稳定力矩MYα的影响因素
Fy、α的影响。Fy↑,侧偏角↑,印迹愈长,ba↑,则MYα ↑。但Fy过大达到附着极限时,Fy↑,则ba ↓。试验表明,α开始增加时, MYα ↑,当α=4~6°时, MYα最大,再使α↑,则MYα↓,在α=10~16°时,其MYα=0。
轮胎的结构型式的影响。在同样侧偏角时,子午胎的稳定力矩较普通斜交胎大。原因是:子午胎径向变形大;Fy大。
轮胎气压的影响。PW↓,印迹增长, ba↑,稳定力矩↑。
FZ的影响。FZ↑,印迹增长, ba↑,稳定力矩↑。
现代高速轿车,由于前轮承受的重力增加,并且广泛采用低压胎,因此,轮胎侧向偏离所产生的稳定力矩相应增加,这常使高速时转向感到沉重。
由试验知,侧偏角1°引起的稳定力矩,相当于主销后倾5~6°的效果,所以在现代轿车上,为了避免转向沉重,可相应地减少主销后倾角。
在个别情况下,甚至使其为0或负值,如红旗轿车的主销后倾角为-1°。
4.侧偏时,切向反作用力FX形成的稳定力矩MXα转向时,侧偏引起的内外轮切向力的作用线到主销的距离不等,力矩:
MXα=FX0·L0-FXi·Li
如MXα与车轮偏转反向,则是稳定力矩;如MXα与车轮偏转同向,则是非稳定力矩。
∴对于前轮驱动汽车,转向时施加驱动力的情况下,MXα为稳定力矩。
对于后轮驱动汽车、对于制动时转向来说,MXα为非稳定力矩。因此,转弯制动时易产生过分偏转,应紧握方向盘。

汽车稳态转向特性检测
测定前,在平坦的坚硬广场上画R0=15m的圆道印迹。
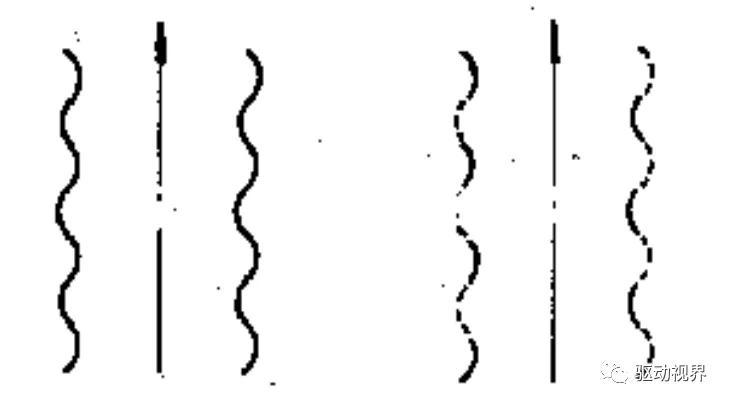
测定时,汽车开始以最低稳定车速沿半径15m的圆道印迹作等速圆周行驶,并保持汽车转向盘的转角不变,再采用逐级加速法或连续加速法提高汽车的车速,然后根据汽车加速行驶后车轮的行驶轨迹定性判断汽车的稳态转向特性,如图所示。
若汽车转向半径不变,则汽车具有中性转向特性;若汽车转向半径变大,则汽车具有不足转向特性;若汽车转向半径变小,则汽车具有过多转向特性。

声明:来源于驱动视界