Adams技巧 | 基于Adams Car建立的转向变传动比模板解析
对于齿轮齿条式的转向器结构,转向器转动比一般用线角传动比表示,而商用车常用的循环球式转向器,其输入和输出均为转动的角度,一般用角传动比进行表示。根据传动比的变化与否,转向器可分为定传动比转向器和变传动比转向器两种。转向器采用变传动比技术,可有效平衡低速大转向时的轻便性要求以及高速直行时的灵敏性要求。目前国外已经研发投产了多种变传动比转向器产品,主要以德国采埃孚公司和美国福特公司为代表。随着变传动比转向器在车辆领域的应用扩展,Adams Car针对该项技术,提出了变传动比建模方法,供用户有效的开展设计工作。本文主要对转向模板中的变传动比建模思路进行解析,方便用户根据自己的需求进行模板的扩展。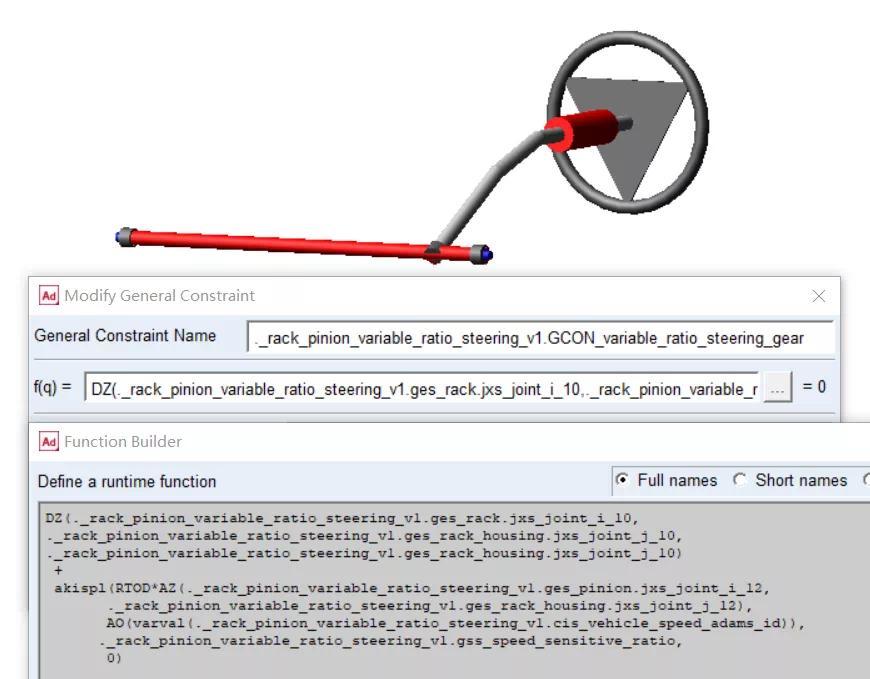
图1 变传动比模型
02变传动比转向器建模思路
变传动比的转向器的模板相对于Adams Car共享数据库中的齿轮齿条式的转向器(\acar\shared_car_database.cdb\templates.tbl\_rack_pinion_steering.tpl),除pinion_to_rack齿轮与齿条的Gear约束有差异外,其他均一致。 由于Gear只能输入恒定的传动比,故需要将Gear约束替换为可变传动比的约束。本文附件的变传动比转向模板采用Special 约束中的GCON (General Constraint)代替齿轮副,进行变传动比的建模。变传动比建模的具体路线如下图2所示:
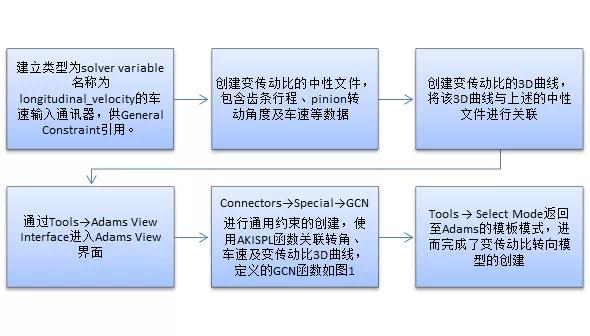
图2 转向器变传动比建模具体路线
除3D曲线的建立以及通用约束GCON外,技术路线中的其他内容属于常规操作,故接下来仅对3D曲线以及通用约束GCON进行阐述。
03变传动比建立所需元素
基于Adams Car建立曲线的方式包括两种,第一种曲线为基于Build→General Data Element→Spline方式建立的通用数据曲线,第二种曲线为基于Build→Data Elements→Spline方式建立的数据曲线。两种曲线有一定的差异,具体的差异如下表1所示。
类别 | General Spline 通用数据曲线 | Spline 数据曲线 |
曲线类型 | 2D以及3D | 2D以及3D |
是否需要属性文件 | 需要属性文件,即TeimOrbit格式的ASCII文件。 | 不需要 |
是否需要数据输入 | 曲线的数据来源于属性文件,不再需要数据的输入。 | 需要进行曲线数据的输入 |
标准模式能否修改 | 属性文件修改不受模式限制,在标准模式下可进行曲线的修改。 | 模板模式时方可进行数据输入,故标准模式下无法修改。 |
表1 General Spline 与Spline的差异
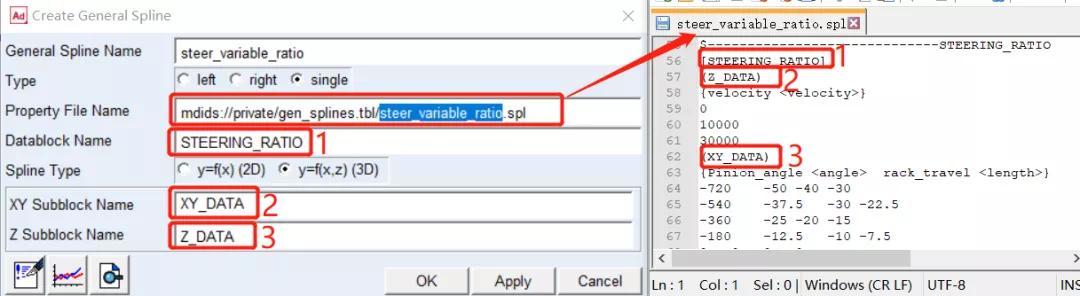
根据上述的差异对比可知,General Spline具有标准模式易于修改的优势,故在进行转向传动比的曲线定义时,采用建立General Spline的方法。创建General Spline之前,需要定义TeimOrbit格式的文件。该文件的数据块主要包括应用”[”,”]”表示的Datablock Name数据块(图3 b 1),”(”,”)”表示的Subblock子数据块(图3 b 2及3)以及应用”{”,”}”表示的表格数据文件(图3 b 4)。创建General Spline曲线时,出现图3 a的对话框。General Spline Name为定义的曲线名称。Type为曲线的类型,包括左右对称的方式以及单一的方式。Property File Name为属性文件,即定义变传动比相关参数的曲线。Datablock Name为数据块,选择图3.1b 的数据块名称。Spline Type 包含两种,分别是2D以及3D,2D为单变量的曲线,而3D为2变量的曲线。若选择2D,则Z subblock不可定义,只有XY Subblock 处于激活状态。若选择3D,则 Z subblock 以及XY Subblock均处于激活状态。完成上述设定之后,即完成了3D通用曲线的创建。
a b
图3 建立General Spline
General Constrain为通用约束,可以应用通用约束定义任意的理想约束关系。通用约束在仿真过程中,Adams的C 求解器会强制其内部的函数表达式f(q)=0。通用约束对话框如图4所示。为了建立变传动比约束关系,f(q)内的函数应为齿条行程、转向系统的pinion转角以及车速之间的关系。具体的函数如图4所示。
图4 GNC约束
图4的公式主要包括如下6个部分,具体说明如下:1、应用DZ位移函数计算齿条行程;2、正号;3、SKISPL函数,通过该函数,根据两个变量(pinion转角和车速)值实时地得到齿条行程、4、应用AZ角度函数得到第一个变量pinion的转角;5、AO(Action Only),该函数为绝对引用,不会被该GNC表达式修改,VARVAL函数得到实时的车速;6、3D变传动比曲线
最终公式为DZ计算的齿条行程减去AKSPL函数计算的齿条行程,GNC会强制该公式等于0,由于AKISPL内marker均不能修改,故Adams C 求解器会强制RACK按照AKISPL计算的齿条行程运动,从而实现变传动比的功能。
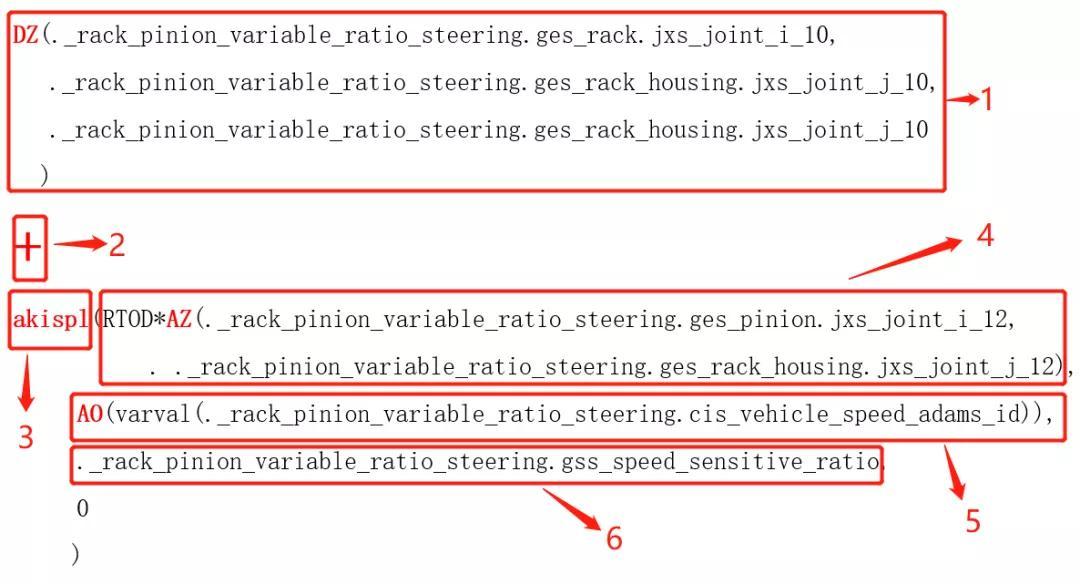
图5 f(q)的函数表达式
应用通用3D曲线的方式进行变传动比曲线的定义,该方式可以在标准模式下快速更改曲线,操作更加便捷;
变传动比的TeimOrbit格式的属性文件后缀建议自定义为”.spl”或”gsp”的方式,Adams Car可快速识别两种后缀的文件。
对于循环球的变传动比转向器,应将变传动比的属性文件中的XY_DATA中的数据更改为转向器输入轴转角与输出轴转角的关系,同时将定义变传动比的GNC函数中的DZ变换为AZ函数;
转向模板中定义的longitudinal_velocity输入通讯器,若车身模板没有相应的输出通讯器,应在车身模板建立同样类型的输出通讯器,以传递车速给转向系统。
05参考文件
参考文件具体如下表2所示,分别为转向模板和变传动比属性文件。用户可根据本公司的软件版本,应用记事本编辑修改模板的Adams的版本号,具体如图6所示。如图7所示,转向模板的变传动比曲线引用了路径“mdids://private/gen_splines.tbl”中的变传动比文件“steer_variable_ratio.spl”,故建议将转向模板文件保存至用户指定数据库中的“templates.tbl”文件夹,将变传动比的属性文件保存至private数据库中的“gen_splines.tbl”文件夹。按照上述要求保存模板文件和变传动比属性文件后,即可以进行子系统及装配的创建,进而进行仿真分析。
序号 | 参考文件 | 备注 |
1 | _rack_pinion_variable_ratio_steering_v1.tpl | EDS格式的转向模板 |
2 | steer_variable_ratio.spl | 变传动比属性文件 |
表2
图6 转向模板的版本更改
图7 引用变传动比文件









