宁波大学杨阳:漂浮式风力机和风-流集成能源装备仿真技术(8月26日)
- 作者优秀
- 优秀教师/意见领袖/博士学历/特邀专家/独家讲师
- 内容充实
- 工程案例
- 平台推荐
- 主编推荐/全网独家



导读:随着减少碳排放的呼声越来越高,风电搭上了新能源发展的快车。在过去的二十年里,风电行业飞速发展,全球风电装机容量从24GW增长至744GW。特别是随着我国 “3060碳达峰、碳中和”的能源发展战略目标的制定,可预见的是,风电在未来至少40年内将继续保持高速发展的态势。
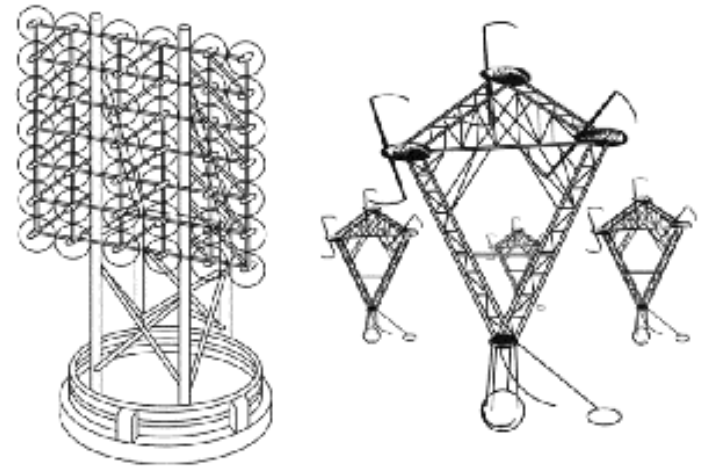
受到技术和成本的约束,目前主要采用陆上/近海固定式基础风力机利用风能。随着近海风资源的逐步规划和“降本增效”的大型化发展方向,区域广阔且风能密度稳定的深海区域必然成为未来风电发展的主要区域,而漂浮式风电是深海区域风能利用的唯一选择。距1972年马萨诸塞大学William Heronemus在第8届海洋技术年会上首次提出漂浮式风能利用概念,过去了将近50年,漂浮式风力机终于要迎来属于自己的真正春天。
一、漂浮式风力机一体化仿真技术
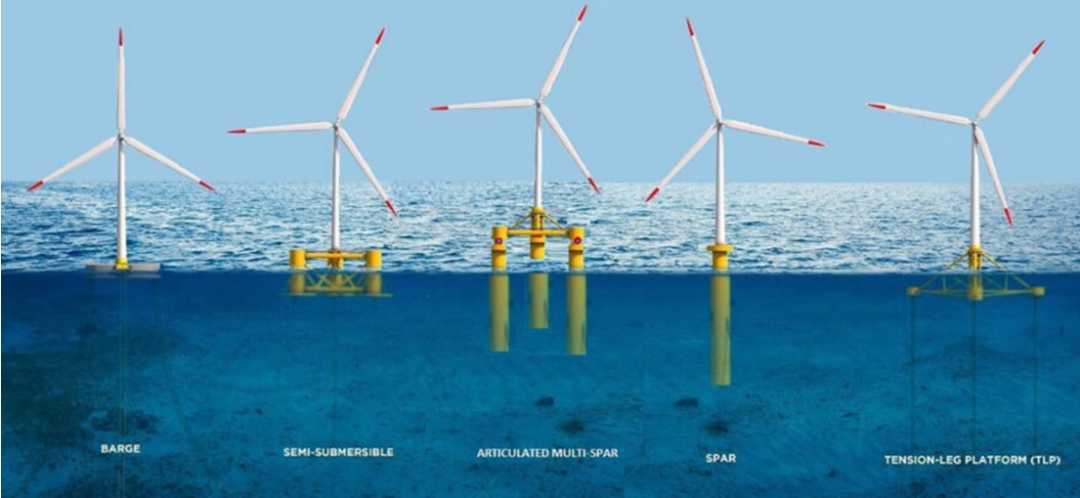
漂浮式风力机通常由风力机和支撑系统(浮式平台、锚泊系统)组成。为了进一步提高设计效率、缩短设计周期并降低设计成本,漂浮式风力机需采用一体化设计方案,即不再分开设计支撑系统和风力机。进行载荷评估时,需要考虑风力机气动弹性与平台/系泊水动力的耦合问题。因此,漂浮式风力机设计涉及气动力学、结构动力学、伺服控制、水动力学和系泊动力学等多个学科的复杂交叉,为其动力学耦合仿真带来巨大的挑战。
1.1 气动弹性
风力机气动载荷主要来源于叶片。当风吹过叶片流线型的截面(翼型),由于上下表面存在压力差,产生气动转矩从而推动风轮旋转。
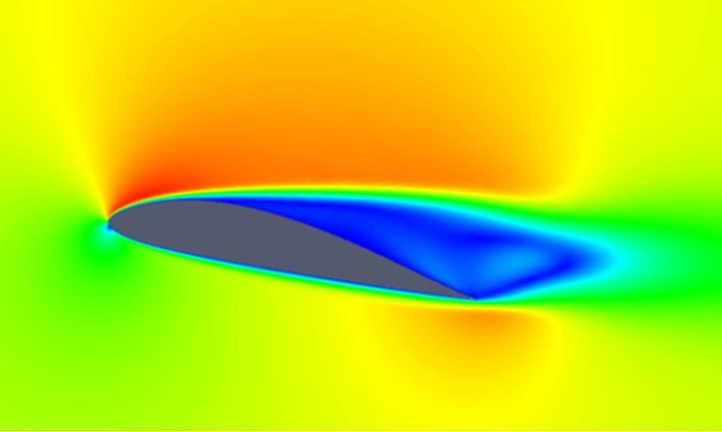
由于翼型气动特性与攻角密切相关,一般翼型的最佳攻角(升阻比最大)在7~10度左右。而对气动扭矩贡献较大的部分主要为叶片径向40%~90%处。靠轮毂太近的,弦长虽然较大,气动力不小,但是力臂太短;靠的远的,力臂虽然够大,但是弦长短,气动力也不是很大。
为保证叶片整体的气动效率,叶片气动外形需要进行特别的设计,主要是设计叶片弦长和扭角。由于不同径向处的圆周速度不同,入流角不同。为保证较高的气动效率,即攻角处于合适范围,弦长和扭角随径向位置一般呈现递减趋势。

因此,不难发现,叶片根部的扭曲程度较大,且比较“宽”,而叶尖则比较“平窄”。一般来说5MW叶片的叶根最大扭角在11°以上,而随着风力机大型化,叶片越来越长,对于根部结构的强度要求越来越高。因此,大叶片的叶根扭角要小一些。一是因为结构强度要求较小的扭曲程度,二是因为大型风力机的转速较低。由于径向位置不同引起的入流角差异也越小,因此扭角整体也呈现降低的趋势。
因为叶片尺寸较大,如今15MW风力机叶片展向已经超过100m,难以保持刚体特性,在高强度气动载荷作用下,叶片将发生弹性形变。叶片弹性变形后,气动外形发生改变,从而影响气动载荷。主要体现在两方面:一是变形过程中的振动速度影响了实际入流速度,从而影响实际攻角;二是结构本身发生变形,影响了实际攻角。气动载荷与弹性变形二者之间形成耦合关系,我们称之为气动弹性。
与传统海洋工程结构(如油气生产平台等)不同的地方在于,漂浮式风力机涉及复杂的气动弹性问题,需要采用合适的理论计算动态入流情况下的叶片气动载荷和大变形情况下的叶片结构动力学响应,同时保证计算效率和精度。这是漂浮式风力机一体化耦合仿真涉及的第一个难点。
1.2 伺服控制
风力机通过发电机将风的动能转化为电能。与汽轮机等发电装备不同的地方在于,风力机运行环境变化莫测,风速时时刻刻处于变化的过程中。为了保证风力机可以在不同风速下正常运行,需要控制风轮转速和叶片桨距角,从而让风力机在设计风速范围正常发电。
一般来说,当风速低于额定风速时,主要控制风轮转速,使风力机运行于最佳尖速比下,此时风能利用效率Cp最大(一般在45%~50%),使风力机尽可能的多发电。而当风速超过额定风速时,必须启动桨距角控制,即降低叶片气动性能,以降低结构载荷保证结构安全;同时维持转速不变,使风力机保持额定功率输出。
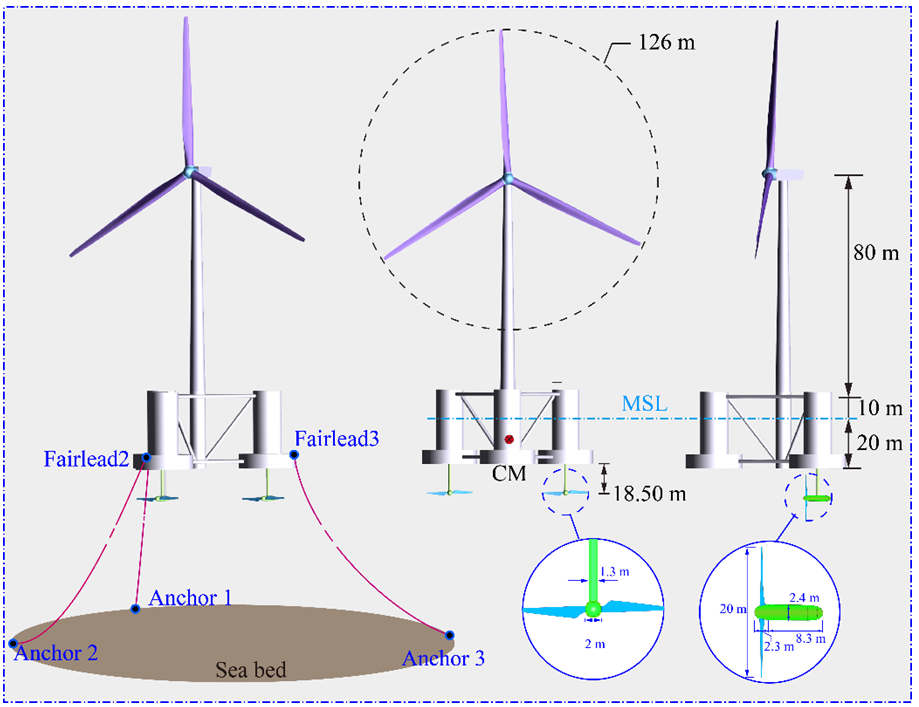
以NREL 5 MW风力机为例,其设计风速为11.4m/s。功率控制基本策略为:当风速低于11.4m/s时,发电机转矩和转速逐渐增大,而当风速高于11.4m/s时,发电机转矩和转速均保持不变,而叶片桨距角逐渐增大。

风力机转速的控制是通过控制输出扭矩实现的。由于风轮转速和气动扭矩T_Aero及发电机扭矩T_Gen满足如下关系式:

通过调节控制变流器功率器件的脉宽,从而控制实际输出扭矩。当输出扭矩大于气动输入扭矩时,风轮转速就会降低;反之,风轮转速增大。
叶片桨距角则是根据风轮转速与目标转速之间的偏差,结合对应的比例/积分增益进行调节控制。一般来说,转速越大,气动扭矩越大。如果当前转速大于额定转速,则需要增大叶片桨距角,以降低气动扭矩,从而降低转速,直至转速恢复至额定转速。具体桨距角应该增大多少,则跟叶片在高风速时的气动性能有关,即气动扭矩对桨距角的敏感度。此处,限于篇幅问题,不做展开。

一个典型的风力机控制系统应该至少满足输出扭矩控制和叶片桨距角控制两个基本功能,输入变量也主要包括发电机当前时刻的实际转速、转矩和目标转速、转矩。但随着风力机系统进一步复杂化,特别是对于漂浮式风力机,平台纵摇和纵荡会影响风力机实际相对风速,从而影响气动性能。
传统陆上风力机定功率控制器还可能导致负气动阻尼效应。即:在高于额定风速的工况下,气动扭矩大于输出扭矩,需要增大桨距角,以降低气动性能。但在降低气动扭矩的同时,气动推力也会降低,气动力提供的阻尼降低。如果桨距角变化幅度较大,那么平台将朝着风向的反向剧烈运动,使得实际相对风速增大,此时气动力可能出现增大趋势。如此,便进入大幅度增大-降低-增大的周期变化中,造成平台剧烈运动。如果控制器的频率与平台纵摇/横摇频率接近,还可能引起平台共振现象。解决这一问题的简单办法是采用较小的桨距角控制增益,使得桨距角变化更为平缓,一定程度上缓解因平台运动引起的气动力变化。
此外,随着风轮尺寸的增大,风轮平面存在较大的速度梯度,即上空的叶片与下面的叶片气动力并不同,统一变桨形式的控制方法需要进行优化和改进,如采用独立变桨控制。
因此,对于漂浮式风力机转速/桨距控制,必须要考虑平台运动对气动力的影响。这是漂浮式风电一体化仿真的另一难点。
1.3 平台与系泊系统
对于固定式基础风力机,通常采用Morison’s方程计算粘性力和附加质量力等水动力载荷。与固定式风力机不同的地方在于,漂浮式风电平台具有较大的运动幅度,且尺寸更大,具有明显的辐射、绕射效应。Morison’s方程不再适用。目前水动力学软件中常用的方法是采用势流理论求解不同频率波浪作用时的平台附加质量、辐射阻尼和波浪力,再通过直接傅里叶变换,结合入射波浪运动学参数,计算平台所受到的水动载荷。此外,由于平台漂浮于水面上,需要采用锚泊系统固定平台运动范围。
由于系泊恢复力受到平台运动的影响,而平台运动又是水动和气动载荷联合作用的结果。因此,漂浮式风力机一体化仿真还涉及到平台水动力及系泊与气动载荷的耦合问题。
二、漂浮式风力机常用耦合仿真软件
目前常见的适用于漂浮式风力机耦合仿真的软件主要包括Bladed、HAWC2和OpenFAST。
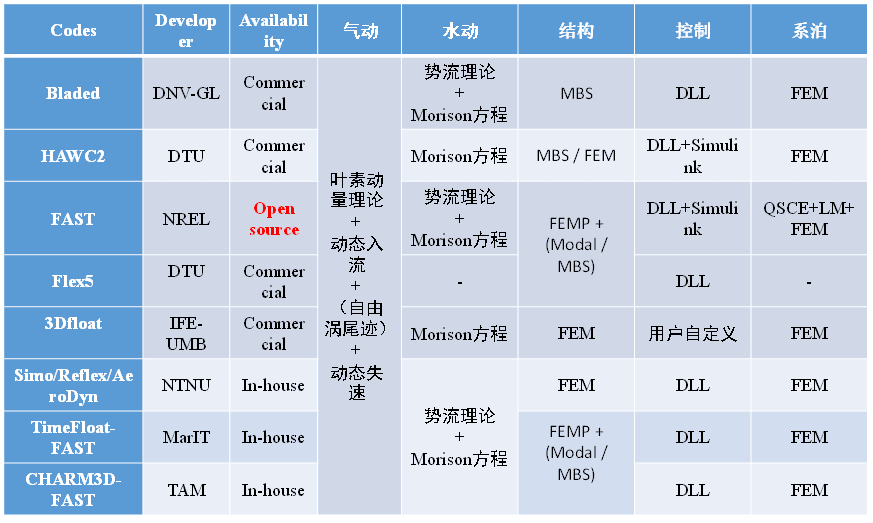
2.1 Bladed
Bladed最开始是由英国Garrad Hassan和他的朋友们有限公司(Garrad Hassan & Partners Ltd,老罗就翻译成“和他的朋友们” )开发的,后面被DNV收购了,由DNV负责销售、维护和进一步开发。因为DNV还拥有海工领域著名软件SESAM,DNV专门开发了一个Bladed和SESAM的耦合接口,将Bladed中风力机的载荷通过接口传递至SESAM,再将SESAM中基础的刚度、质量和载荷传递回Bladed,通过多次迭代实现全耦合。目前最新版本Bladed好像是4.11,开始支持多个浮体的水动力计算了。作为目前风力机设计软件中的领头羊,Bladed在商业界应用极为广泛,大部分的风电整机厂商均采用Bladed进行整机仿真载荷分析。
Bladed气动部分依然是采用经典的动态入流理论结合叶素-动量理论,即通过动态入流理论求解风轮平面诱导速度,获取叶片各个截面的实际攻角,调用对应的翼型气动力系数,通过叶素理论计算叶片气动载荷;在不满足动态入流的条件下,如风速较低的工况,则采用叶素-动量理轮迭代求解叶片各截面的诱导因子,然后再用同样的方法计算气动力。叶尖/轮毂损失采用Prandtl修正。动态失速则采用Beddoes-Leishiman模型进行修正。
初始版本的Bladed中,叶片和塔架等部件的结构动力学模型也采用经典的模态法,对于每个自由度,最多支持三阶模态。经过不断更新,现在Bladed采用多体动力学方法建立结构动力学模型。
Bladed中采用势流理论结合Morison’s方程计算浮体的水动力载荷,这个没什么好说的。
2.2 HAWC2
HAWC2是由DTU Wind Energy Division自主开发的风力机耦合仿真软件。不得不感叹,DTU的风能部门实力真强!大学里面一个学院,开发了风力机叶片设计流程所需的所有计算软件,比如NB哄哄的HAWC_Opt2 framework,调用HAWC2、HAWCStab、BECAS等对叶片进行气动外形、结构铺层、气动弹性稳定性优化。目前公开的DTU 10 MW和IEA 15 MW风力机叶片都是DTU设计的,为广大科研学子提供了绝佳的科研模型。
当然,其中最为著名的还是HAWC2(Horizontal Axis Wind turbine simulation Code 2nd generation)。HAWC2气动与结构部分与Bladed大致相同,只是水动力计算方面,只内置了Morison’s方程,如果是大尺度漂浮式风力机平台,则需要编程通过HAWC2内置的external forces DLL计算平台水动力载荷和系泊恢复力。
2.3 OpenFAST
OpenFAST是由NREL开发的开源风电一体化分析软件,其前身为FAST,发展至今已有二十余年。
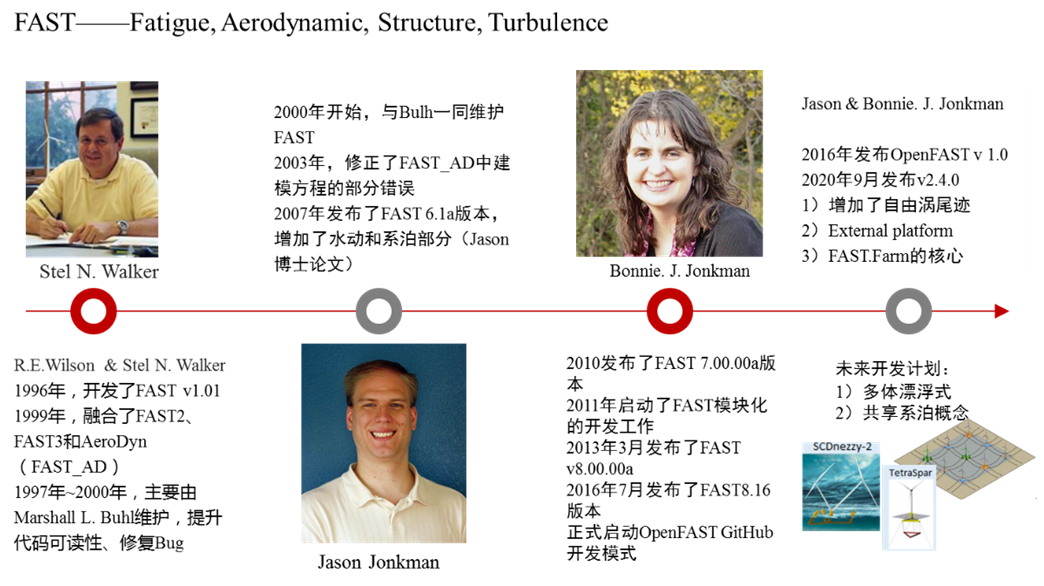
当前版本的OpenFAST(v3.0)具有十分强大的功能。对于叶素动量理论误差较大的大角度偏航工况,可以选择精度相对更高的自由涡尾迹求解风轮平面诱导速度;
基于几何精确梁理论建立了叶片结构动力学求解模型(BeamDyn),从而可以考虑超长叶片的大变形引起的几何非线性问题。在2015年由DTU和NREL联合发布的HAWC2和BeamDyn比较结果来看,BeamDyn计算精度更高。在SubDyn中采用线性有限元梁模型表示塔架下方的substructure,对于导管架等形式小长径比结构,一般采用铁木辛柯单元以考虑其剪切效应。目前SubDyn还可以用于建立漂浮式平台的结构模型,以计算平台不同位置处的结构响应。
在伺服控制方面,OpenFAST提供了多种控制接口,如Bladed格式的DLL、Simulink和LabView等。此外,提供了液柱阻尼器(TLCD)控制功能,控制对象也从塔架、机舱扩展至叶片和平台了。
平台水动力方面,采用势流理论和Morison’s方程,支持多浮体水动力计算,而且可以考虑在SubDyn中对平台结构进行细化建模,从而计算平台结构响应。不过针对这一功能,个人有点疑问,如果采用势流理论计算平台水动力,则平台在HydroDyn中被视为一个刚体,所有水动力载荷均作用于参考点,并不是按照平台几何外形分布于结构表面。所以,我个人猜测,平台结构响应计算中所用到的水动力,只包括Morison’s方程计算的附加质量力及粘性力、结构本身重力及惯性力、气动力以及系泊恢复力。通过势流解得到的水动力载荷以一个overall的形式,作用于平台顶部,与气动力的作用方式类似。
总的来说,OpenFAST是一个十分理想的研究工具,不过由于其没有GUI,在命令行窗口运行,模型参数定义和环境工况修改都是通过修改其输入文本实现,因此,对于初学者具有一定的难度。
2.4 SIMA/Riflex/AeroDyn
除以上三种较为著名的一体化软件之外,许多研究学者基于海工领域水动力学软件,结合FAST/AeroDyn计算叶片气动弹性/气动力,从而形成一个新的耦合仿真工具。一般这类耦合工具多为课题组内部使用,未公开给普通用户。比如NTNU开发的SIMA/Riflex/AeroDyn,在SIMA中计算平台水动力和系泊恢复力,通过JAVA编译的DLL连接AeroDyn模块计算风轮气动力,最后再通过Riflex计算叶片、塔架和平台等结构的动力响应。由于Riflex具有强大的结构动力响应计算功能,因此,只与气动模块AeroDyn形成耦合关系,未采用FAST中计算结构响应的部分。
2.5 TimeFloat-FAST
而Marine Innovation & Technology开发的TimeFloat-FAST则采用FAST计算平台顶部风轮、机舱和塔架等结构的气动力及结构响应,在TimeFloat中计算平台水动力和系泊恢复力。具体实现方式是通过开发的接口,将TimeFloat中得到的平台运动和载荷传递至FAST中,再到FAST中求解风轮、机舱和塔架的响应,并将风力机载荷传递回TimeFloat,以重新计算下一时刻的平台运动。著名的WindFloat概念就是通过这一软件进行开发、计算和验证。
2.6 CHARM3D-FAST
CHARM3D-FAST与TimeFloat-FAST类似,最早由德州农工大学的硕士研究生Sangyun Shim在2007年基于FAST v6开发的,通过建立的接口,将CHARM3D得到的平台位移和速度传递给FAST,再将FAST得到的气动载荷传递回CHARM3D。显然,平台运动是在CHARM3D中计算的,而且风力机运动学方程中也没有考虑平台加速度的作用。
但奇怪的是,在之后的应用中,CHARM3D与FAST之间的数据传递关系反过来了:将CHARM3D中的水动力载荷传递至FAST,再通过FAST计算平台位移和速度。

2.7 F2A
TimeFloat与CHARM3D在国内似乎十分小众,受众较广的是ANSYS-AQWA。AQWA是上世纪70年代由Atkins公司开发的海洋工程结构水动力分析软件,后来ANSYS Inc收购了AQWA的运营方Century Dynamic,将其融入了ANSYS软件包。由于ANSYS在国内相关行业的统治地位,AQWA受众较广,是大部分研究生用于浮体水动力分析的第一选择。
由于AQWA的应用对象主要是船舶及油气平台,一般没有复杂的气动载荷。对于漂浮式风力机的水动力分析,目前的版本不能准确计算在平台大幅运动影响下的风轮非定常气动力以及叶片/塔架等柔性结构的弹性变形。但AQWA提供了一个用户自定义载荷接口,可通过FORTRAN语言编写的动态链接库(user_force64.dll)或者Python编写的外部载荷服务器计算平台受到的外部载荷。
为了在AQWA中考虑漂浮式风力机的气动伺服弹性与平台运动之间的耦合作用,上海理工大学的杨阳博士(现为宁波大学海运学院副教授)于2020年3月,在user_force64.dll中实现了FAST v7中风力机气动-伺服-弹性仿真功能,从而在时域中耦合了FAST与AQWA,即FAST2AQWA,简称F2A。F2A目前已开源至GitHub中供广大用户使用、交流和学习,源代码、算例说明以及基本的用户手册也可以在GitHub平台下载:https://github.com/yang7857854/F2A。
三、漂浮式风-流集成能源系统
深海地区除了丰富的风能以外,还有丰富的波浪能和潮流能。因此,漂浮式集成能源系统的设计概念也逐渐引起大家的关注。波流能装置与风力机共享同一平台,可以极大降低能源利用成本,但同时也增大了系统复杂程度。对于风-流集成能源系统,如何考虑风力机气动弹性与流能装置水动力耦合问题是难点之一。
针对这一问题,杨阳博士在F2A的基础上,通过AeroDyn计算水平轴潮流能水轮机非定常水动力,并与风力机气动-伺服-弹性耦合,从而形成了漂浮式风-流集成能源系统的全耦合仿真模型CAT4IFES。
相信很多朋友都有一个疑问,如果让我自己来修改或扩展F2A的功能,应该如何做呢?这首先就要知道F2A是如何开发的。同样,杨阳博士是如何在F2A的基础上,开发了CAT4IFES,也许会对你有所帮助。
为此,我们邀请宁波大学杨阳副教授在2021年8月26日20时,为我们直播讲解漂浮式风力机和风-流集成能源装备仿真技术,以下是课程安排,敬请期待!

以上资料(讲座PDF在直播结束后更新)请在本文附件下载即可,如果遇到下载问题请在文章后面留言或者私信平台客服。
(完)