单自由度受迫振动系统详解
具有粘性阻尼的系统,自由振动会逐渐衰减,并最终停下来。但是,当系统受到外界动态作用力的持续激励时,系统的振动将会持续下去。系统在外界持续激励下引起的振动称为强迫振动,它是系统对外部激励过程的响应。系统的响应是指外界的激振所引起系统的振动状态,如位移、速度和加速度等。系统的激励可以是力,也可以是位移、速度和加速度。
激励随时间变化的规律可以分为,简谐激励、非简谐周期性激振和随时间任意变化的非周期性激振。简谐激振力是按正弦或余弦函数规律变化的力,如偏心质量引起的离心力,载荷不均或传动不均衡产生的冲击力等;非简谐激振力,如凸轮旋转产生的激振、单缸活塞-连杆机构的激振力等;随时间变化的任意激振力,如爆破载荷的作用力,也可以是位移、速度和加速度。
谐波激励是最简单的激励,系统在谐波激励下的响应也是简谐的。对于线性系统,谐波激励及其响应均满足叠加原理,复杂谐波的激励可以分解为一系列简谐激励,然后再对每一个简谐激励的响应叠加,即可获得总的响应。谐波激励下的响应问题是强迫振动中最简单、最基础的问题。
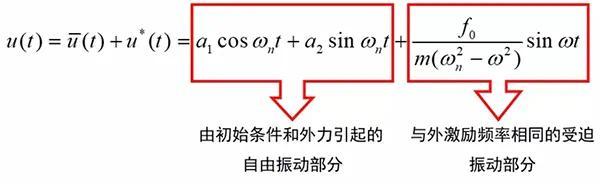
受迫振动方程:

非齐次通解=齐次通解 非齐次特解
齐次方程通解:

特解:

待定常数:
非齐次方程通解:
2. 受迫振动的稳态振动
从方程的通解可以看出,振动的位移由自由振动、受迫振动两部分组成。教科书中通常在此引入阻尼,这样振动在阻尼的作用下自由振动部分逐渐衰减,若干周期后只剩下受迫振动部分。这一点并不符合初始的无阻尼假设,只是简化分析上的考虑,但是应该看到受迫振动部分才是整个解中值得关注的关键部分。
这样方程的解可以简化成:
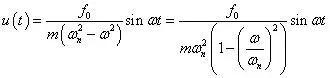

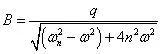
振幅:
由F=kx,可令Bs=f0/k,它相当于激振力幅值f0 静作用在弹簧上所产生的静变形。

由此可见,强迫振动的频率与激振力的频率相同,即系统的强迫振动与激振力具有相同的变化规律;强迫振动的振幅决定于系统本身的物理性质,激振力的大小和频率比与初始条件无关;其振幅比由频率比决定。
当λ<1时,随着λ 的增大,即ω 增大,振幅比B/Bs 也相应地增加,系统的振幅增大;振幅比B/Bs 为正,受迫振动与激振力同相,所以受迫振动与激振力之间的相位角ψ=0。
λ 很小 (ω<<ωn) 时,振幅比B/Bs ≈1,即B=Bs ,振幅B 几乎与激振力幅值引起弹簧的静变形Bs 相等,此时系统的静特性是主要的。
λ>>1(ω>>ωn) 时,振幅比B/Bs 趋近于0,当激振频率ω 远远超过系统的固有频率ωn时,振幅反而很小。
λ=1(ω=ωn)时,振幅比B/Bs 无穷大,即受迫振动的振幅将达到无穷大,即出现共振现象。
共振的振幅B:

对于确定的系统而言,共振振幅B 与激振力的大小,作用时间成正比;与固有频率成反比。由此可见,固有频率越低越危险,激振力越大振幅越大,作用时间越长振幅越大。因此,在共振不可避免时,可以从这三个方面入手控制共振强度(振幅)。
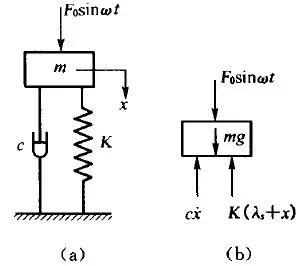
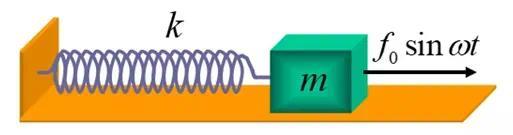
图1 强迫振动力学模型

令ω²=k/m,2n=c/m,q=F0/m

它的通解可以用二阶线性常系数齐次微分方程的通解x1(t ) 与方程的特解x2(t ) 之和表示,即:X=x1(t ) x2(t )。


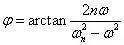
其中,ψ 为位移落后与激振力的相位角,B 为受迫振动的振幅。
在有阻尼的情况下,x1(t ) 只在振动初期某一较短的时间有意义,随着时间的增加,它将逐渐衰减殆尽。
将x2(t ) 代入方程,得到
令λ=ω/ωn,ζ=n/ωn
2. 稳态振动
有阻尼单自由度系统在简谐外激励下的稳态振动有如下规律:
对谐波激励的响应仍然是等幅谐波,运动规律有激励频率ω、振幅X、滞后相位ψ 确定。
响应频率与激励频率相同,响应滞后激励的相位角为ψ。
滞后相位角ψ 与无阻尼响应的初相位不同,前者是由于系统的阻尼引起,而后者是由初始条件确定的。
强迫振动的振幅决定于系统本身的物理性质、激振力大小和频率比,与初始条件无关。
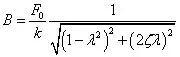
将振动方程的解x2(t ) 振幅B 变形可得下式:
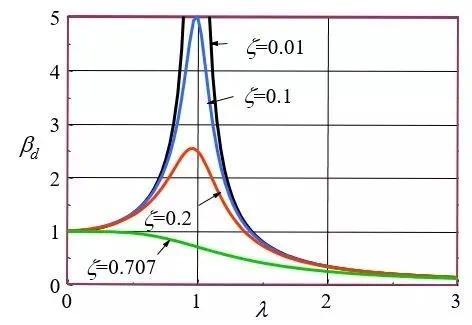
图2 有阻尼振动的幅频特性曲线
从图2可以看出:
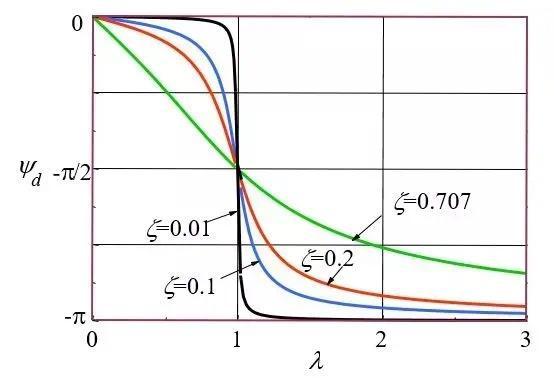
图3 有阻尼振动的相频特性曲线
由图3可见,小阻尼振动系统的相频特性:
当激励频率很低时,相位角滞后很少,说明振动位移几乎与激励是相同的。但随着激励频率的增加,相位角滞后程度增大。
当激励频率很高时,相位角滞后超过π/2,说明振动位移几乎与激励是反相的,这主要是质量惯性所导致的结果。
当激励频率等于固有频率时,即λ=1时,ψ=π/2。
在阻尼很小时,当λ<1,相位角趋于0;当λ>1,相位角趋于π。对于ζ=0 的系统,在λ=1 时,相位角ψ 由0突然变为π,即由同相突变为反相,这种现象称为倒相。
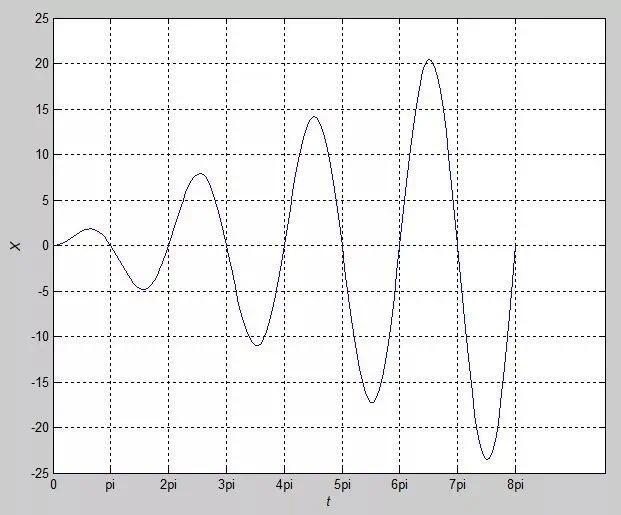
与无阻尼系统一样,有阻尼受迫振动系统的总响应也由自由振动和受迫振动两个部分构成。初始阶段,自由振动和受迫振动同时存在于系统之中,由于阻尼的存在,系统总响应中的自由振动分量会很快被衰减殆尽。在系统达到稳态振动之前的振动过程,称为过渡过程。
图4 瞬态振动(过渡过程的振动)
参考文献:
[1] 闻邦椿 等编著 机械振动理论及应用[M],北京:高等教育出版社,2009.5(2015.1重印)
[2] 鲍文博 等编著 振动力学基础与Matlab应用[M],北京:清华大学出版社,2015(2019.8重印)
[3] 陈奎孚 编著 机械振动基础[M],北京:中国农业大学出版社,2010.12[4] 顾海明,周勇军 编,机械振动理论与应用[M], 南京:东南大学出版社 2007.2【免责声明】本文转自产品设计研习社,版权归原作者所有,仅用于学习!对文中观点判断均保持中立,若您认为文中来源标注与事实不符,若有涉及版权等请告知,将及时修订删除,谢谢大家的关注!

硕士
|
CAE仿真负责人
个人著作《汽车NVH一本通》
获赞 1177粉丝 6598文章 1034课程 20