Abaqus Connector-搭建整车底盘悬挂系统
汽车的舒适性、操控性跟底盘的悬挂系统有着密切的关系,麦弗逊式独立悬架是比较常见的一种悬挂系统,它的舒适性还可以,结构简单而且成本相对低廉,所以在现代汽车工业中有着非常广泛的应用,本期文章将介绍使用Abaqus Connector搭建整车麦弗逊式独立悬架。

麦弗逊式独立悬架
麦弗逊式独立悬架结构主要包括减震器(弹簧、阻尼器)、控制臂、稳定杆等,这些部件之间通过多种运动副连接在一起,传递载荷与运动关系。Abaqus中的Connector单元可以表达各种复杂的连接关系,实现汽车底盘悬挂系统的动力学建模分析。
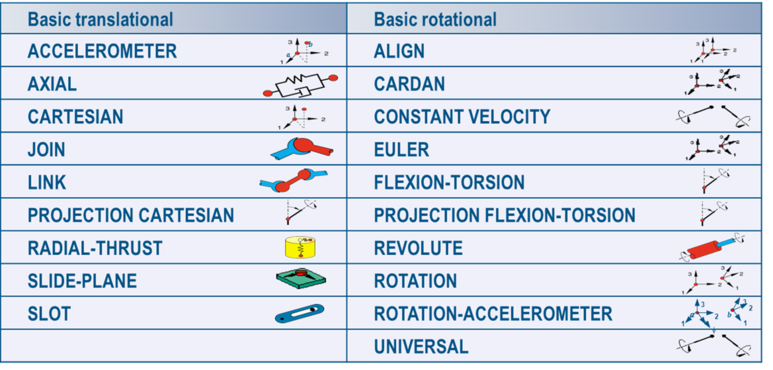
Abaqus中的Connector单元(部分)
首先,我们可以简化出悬架部件的基本构型,并以刚体的形式纳入整车悬挂系统模型中,各个部件之间的连接关系采用Interaction模块中的Connector单元来完成建模。
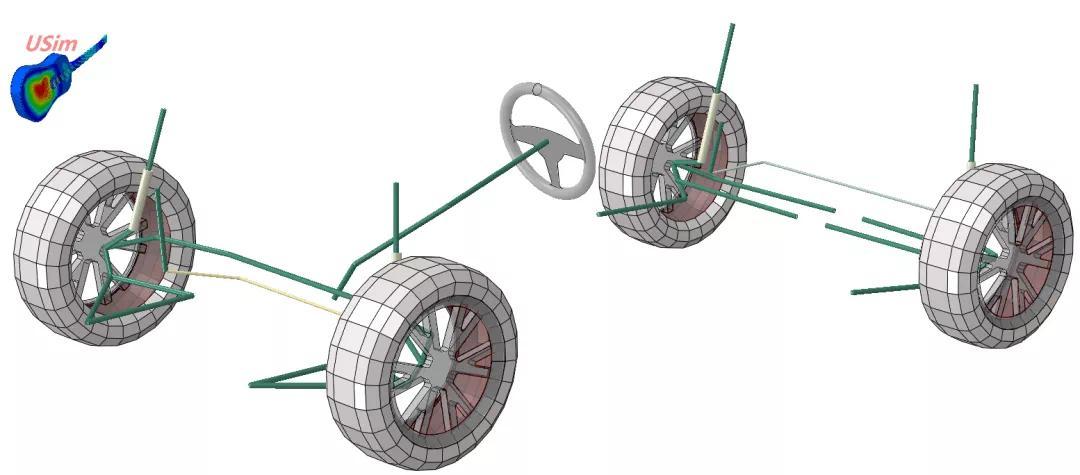
麦弗逊式独立悬架结构简化模型
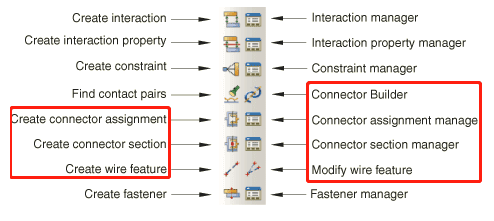
Connector单元的GUI建模工具
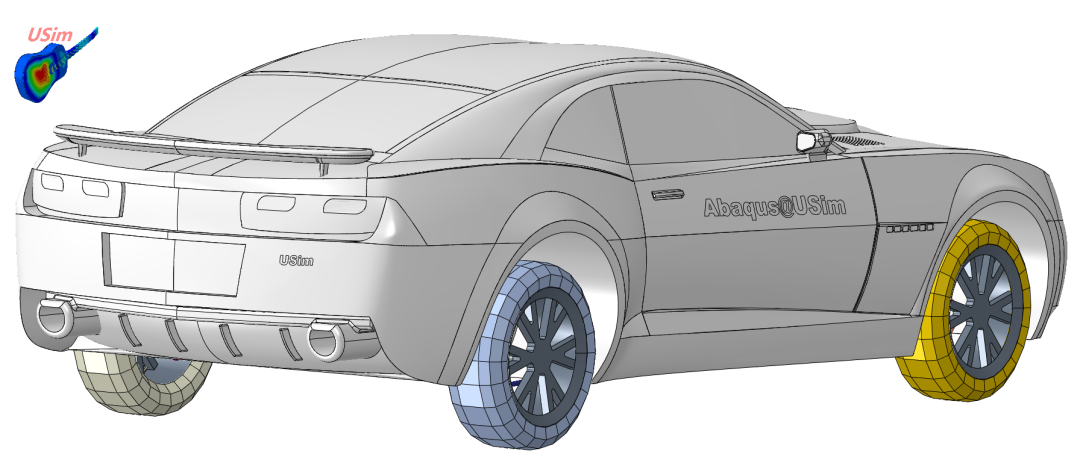
底盘悬挂系统动力学模型整车外观
转向系统采用三种连接器单元:U Joint、Flow-Converter、Slip Ring,可以实现将转向柱的转动转化为前轮拉杆的平动,推动前轮进行同步转向。
转向系统
利用Axial连接器的Elasticity和Damping属性来定义各独立悬架的减震器。
碾过减速带(23.8Km/h)
减震弹簧的力-时间曲线
通过方向盘控制汽车的前进方向,先向左打一圈,再迅速回正、紧接着向右打一圈,绕过减速带,在现实中操作起来很容易,现在我们要在Abaqus中实现这个过程,注意速度云图,轮胎与地面接触区域为蓝色,代表此时轮胎纯滚动。
绕过减速带(视角1)
绕过减速带(视角2)
接下来是甩尾停车,直行中猛踩刹车后打方向,对应到我们的Abaqus虚拟驾校里就是将径直行驶的车辆后轮Hinge连接器转速迅速降至0,然后给转向柱以指定转角。
甩尾停车
最后是“科目五”:漂移。
动作要领:弯道行驶中迅速反打方向盘。
漂移
Connector是Abaqus中形式超级简单的单元,所有的Connector单元都只有a、b两个节点,但是它的内涵却十分丰富,除了可以定义弹塑性、阻尼等常规属性,还能定义锁止与损伤、失效等属性,对于模拟具有复杂连接形式的整体系统,十分方便。【免责声明】本文转自USim(ID:You_Sim),版权归原作者所有!仅用于个人学习,对文中观点判断均保持中立,若您认为文中来源标注与事实不符,若有涉及版权等请告知,将及时修订删除,谢谢大家的关注!



