iphone12的激光雷达,“就连NASA也会在下次火星登陆中用到它”?

昨天凌晨的苹果发布会上,苹果宣布给iPhone 12 Pro加上了LiDAR(常常被翻译为“激光雷达”),可以与相机镜头相结合,让iphone能够更好地获取拍摄图幅中的远近信息。事实上,更早之前的iPad Pro也已经用上了LiDAR。

iphone 12 pro的LiDAR扫描仪 | 苹果官网
更会玩的是,苹果这回还蹭了一把火星车的热度,表示这是“下一次火星着陆任务中将会用到的技术”“上得火星,入得客厅”。格调直接拉满了。
iPhone 12 Pro的LiDAR介绍 | 苹果官网
“就连NASA也会在下次火星登陆中用到它”▼

听起来好像直逼航天科技前沿了呀…其实…嗨…且不说LiDAR技术用于航天探测已经不知道多少年了,下一次火星任务真的用了这个技术么?
激光雷达?激光还是雷达?
LiDAR这个词其实在深空航天和地球遥感等领域都广泛使用,这带来了一些尴尬——有时候大家看到一样的词,理解到的意思却完全不一样。
这是有历史原因的。
大家可能知道,雷达(RADAR)这个词诞生于1940年左右,原本是个英文词组的缩写:radiodetection and ranging,意为“无线电探测和测距”。最开始主要用于军事,后来慢慢普及,变成了一个普通单词radar,不再用大写标注。中文的“雷达”是直接的音译,没有体现出这个复杂的意思。
“雷达”一词的起源 | Owen Bishop, in Understand Electronics (Second Edition), 2001
雷达测距的原理很简单,通过主动发射和接收某些频段电磁波,测量信号往返时间,来反算目标的位置、速度、大小等信息。这个电磁波,主要指无线电(radio)和微波(microwave)波段,别忘了雷达的r就是radio的意思。
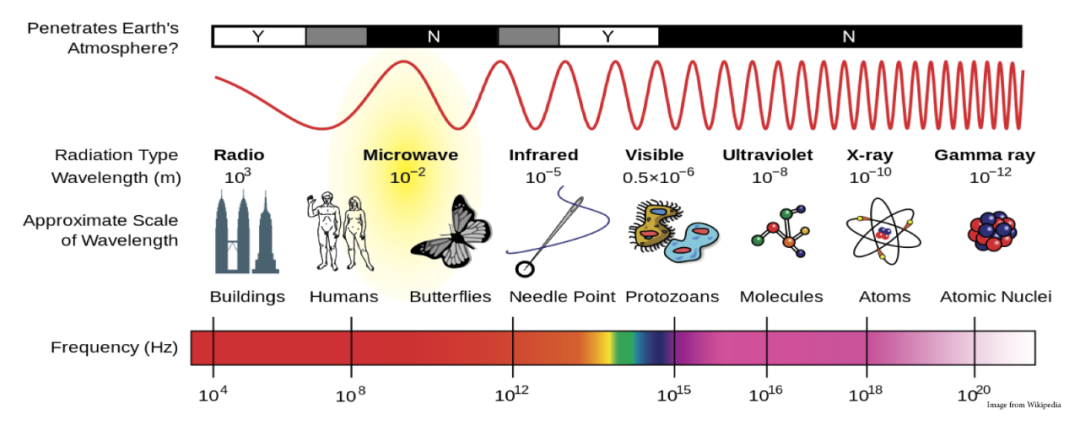
电磁波各波段。雷达以无线电和微波波段为主,LiDAR以近红外、可见光和紫外波段为主 | 维基
而LiDAR这个词则诞生于激光器的发明之后,最开始是光(light)和雷达(radar)两个词的合成词,是全称COherent Light Detecting And Ranging(相干光探测与测距,CILiDAR)的缩写,完全用了雷达(RADAR)的构词模式,因此也被翻译为“激光雷达”或者“光学雷达”。直接意思可以理解为“用雷达那样的方式探测,只是把雷达波段的电磁波换成了波长更短的激光波段的电磁波”,但实际上这里的“雷达”已经悄然从“探测波段 探测手段”变成了“探测手段”,意思上直接给瘦了个身。

飞行时间法(TOF)激光测距基本原理,利用发射&接收激光束的往返时间来推算目标物的距离、位置、大小等参数。发射/接收装置的距离很短或者不动的话,可以认为光是以几乎相同的角度发射和接收的 | 维基
总结来说:激光雷达(激光探测和测距)和雷达(无线电探测和测距)探测原理相似,但使用的波段不同,发射接收装置不同,使用场合也不同。
如今的LiDAR作为Light Detecting And Ranging(光探测与测距)的缩写,其实直译来说完全没必要出现“雷达”这样的字眼,反倒是有些地方缩略翻译成“光达”倒是颇得“雷达”这个译法的精神。只能说“激光雷达”这个译法有历史原因,倒也可以理解。只是随着激光和雷达的使用场合越来越丰富,时不时还是会带来一些误解。
地形探测好帮手LiDAR
激光和雷达都能测距和测高,而且在深空探测中各有不同的使用场合,所以在深空探测领域常常会把激光测距和雷达测距完全区分开使用。
金星和土卫六这样被厚厚大气层覆盖的天体,波长较短的“光”几乎透不进去,所以这样的天体获取表面地形数据只能用雷达测高。
麦哲伦雷达测高计获取的金星(近)全球地形数据▼
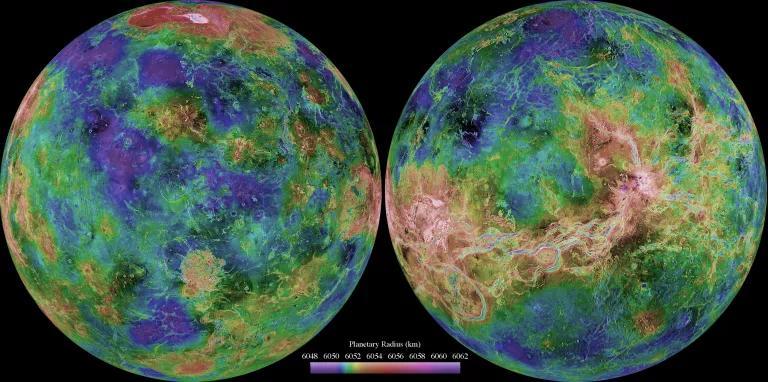
高程为距质心距离 | NASA/JPL/USGS
卡西尼号雷达探测获取的土卫六(部分)全球地形数据▼
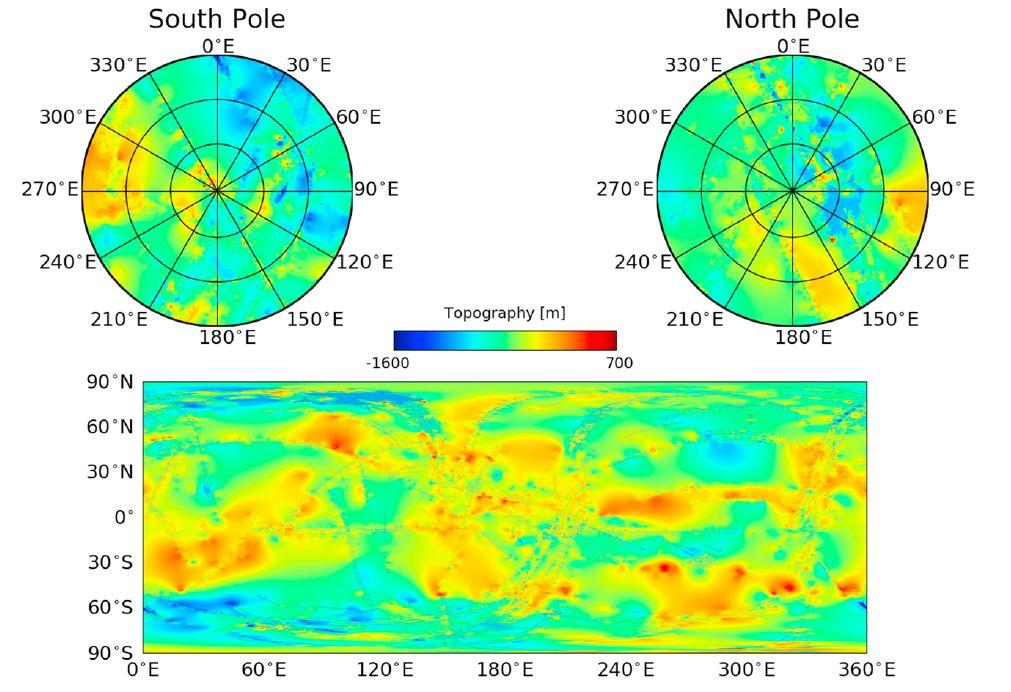
土卫六全球地形图,参考面为土卫六海水面所在的大地水准面,全球分辨率1°×1° | 来源:[1]
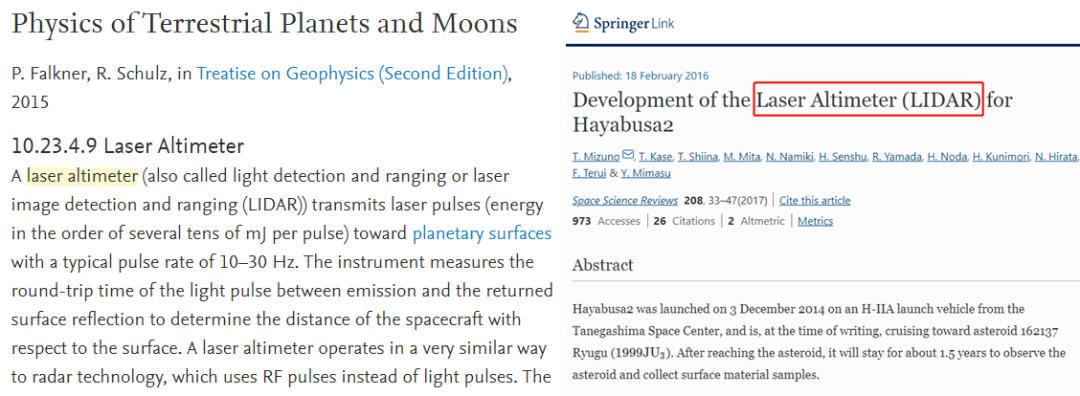
而对于月球、火星、水星这样几乎没有大气层的天体,激光测距的定向性更好、分辨率更高,总之更好使。实际使用激光测距技术时时也不会用“激光雷达”这样的表达,而是直接把LiDAR翻译为“激光测高计”或者干脆英文都直接使用“激光测高计”(Laser Altimeter)这样的描述。
行星探测领域:LiDAR = 激光测高计
1994年的克莱门汀探测器激光测高获取的月球全球地形图▼
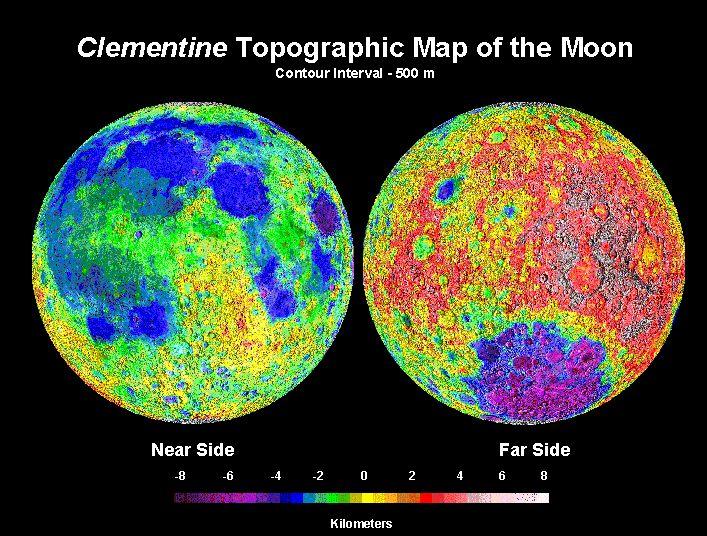
来源:Brian Fessler and Paul Spudis, LPI
2007年的嫦娥一号探测器的激光高度计和激光测高获取的月球全球地形图▼
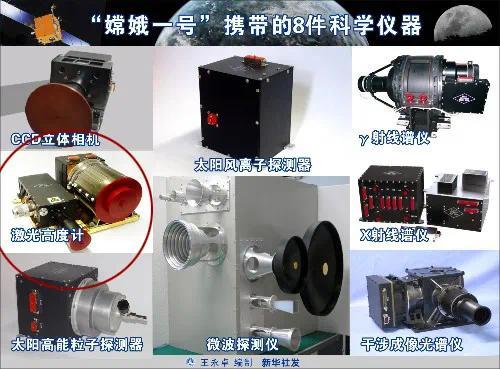
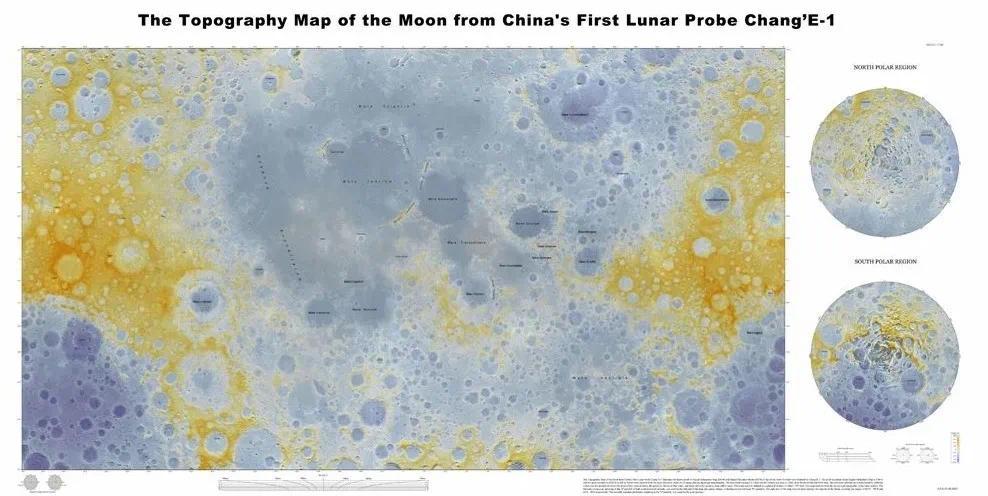
来源:新华社 & 中国科学院国家天文台/探月工程地面应用系统
1997年的火星全球探勘者号(MGS)和2009年的月球勘测轨道飞行器(LRO)则用各自携带的MOLA测高计和LOLA测高计,为火星和月球贡献了迄今为止最高分辨率的全球高程地图。
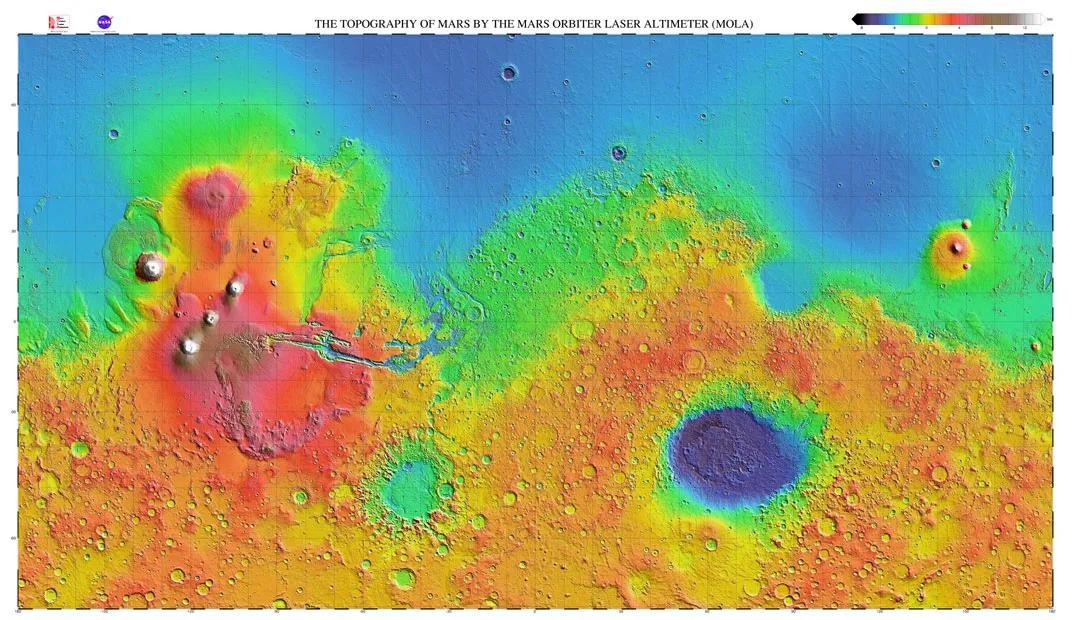
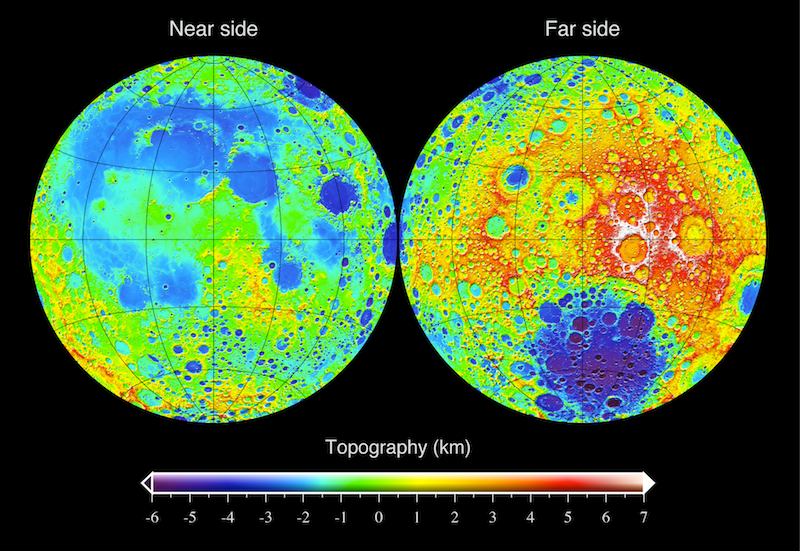
MGS和LRO探测器激光测高获得的火星(上)和月球(下)全球地形图 | NASA
地球更是有专注于测高的人造卫星,我们常常称之为测高卫星。典型的激光型测高卫星例如NASA的ICESat和ICESat-2,各自携带的唯一仪器就是机载LiDAR——分别叫地球科学激光测高计系统(GLAS)和高阶地形激光测高计系统(ATLAS),主要目标是测量冰盖高度和海冰厚度。
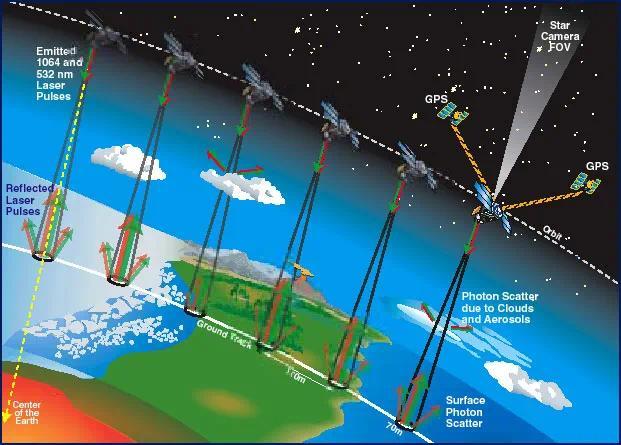
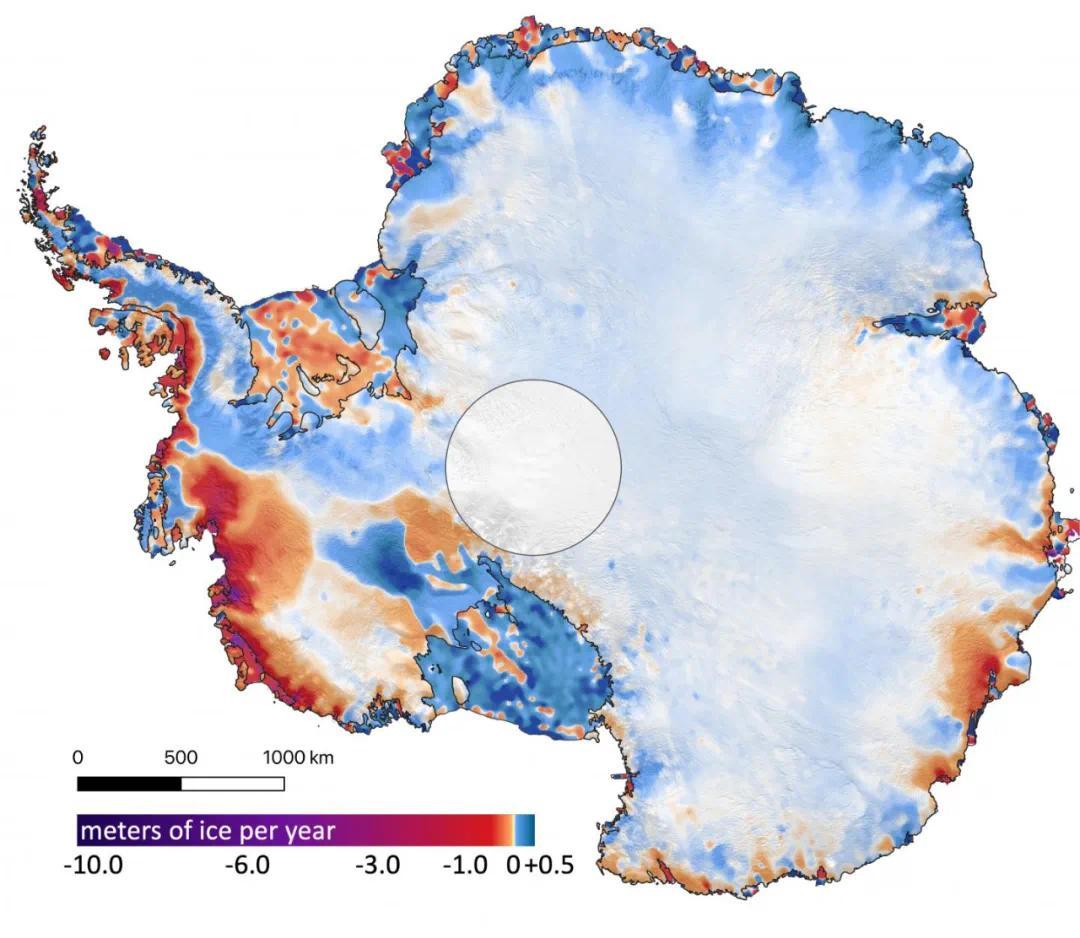
(上)ICESat的GLAS测高系统工作原理示意图 | NASA/Deborah McLean (下)ICESat-2的ATLAS测高系统获取的2003-2019年南极冰盖厚度的增减。中心的空白是极轨卫星的轨道星下点空白 | Smith et al./Science
着陆过程中的强辅助LiDAR
对于着陆型探测任务,激光测距仪更是常见配置。JAXA的小行星“龙宫”采样返回任务隼鸟2号携带的四大科学仪器之一就是LiDAR。(详见:JAXA隼鸟2号科学仪器全解读)
隼鸟2号的LiDAR。激光光束经扩束器放大后发出,再冲小行星表面反射回来。通过测量往返时间来计算探测器到龙宫表面的距离 | JAXA
LiDAR连续扫描小行星,记录下探测器到每个扫描点的距离,这些测距信息结合光学ONC相机拍摄的龙宫表面照片,就可以帮助隼鸟2号建立更高质量的全球三维地形模型。
隼鸟2号LiDAR结合光学相机影像获取龙宫全球三维地形信息 | JAXA
是不是跟苹果的LiDAR扫描挺像的?

(上)隼鸟2号的LiDAR和小行星“龙宫”扫描点云 | JAXA (下)iPad Pro探测点云示意图 | 苹果宣传片
除了用来获取全球地形数据之外,测距还会用于探测器着陆过程的导航定位,帮助探测器在降落过程中实时掌握与地表的距离,这对探测器的安全着陆至关重要。隼鸟2号在着陆采样过程中就是以激光测距作为主导航定位手段的。
实际操作中,随着距离小行星表面越来越近,LiDAR接收激光的敏感度也会随着距离变化。隼鸟2号针对不同高度采用了两种激光测距手段:50米高度以上使用常规的LiDAR激光测距,50米高度以下,系统会根据接收激光的敏感度有一次自主调节,从常规LiDAR切换到近距离激光测距LRF。
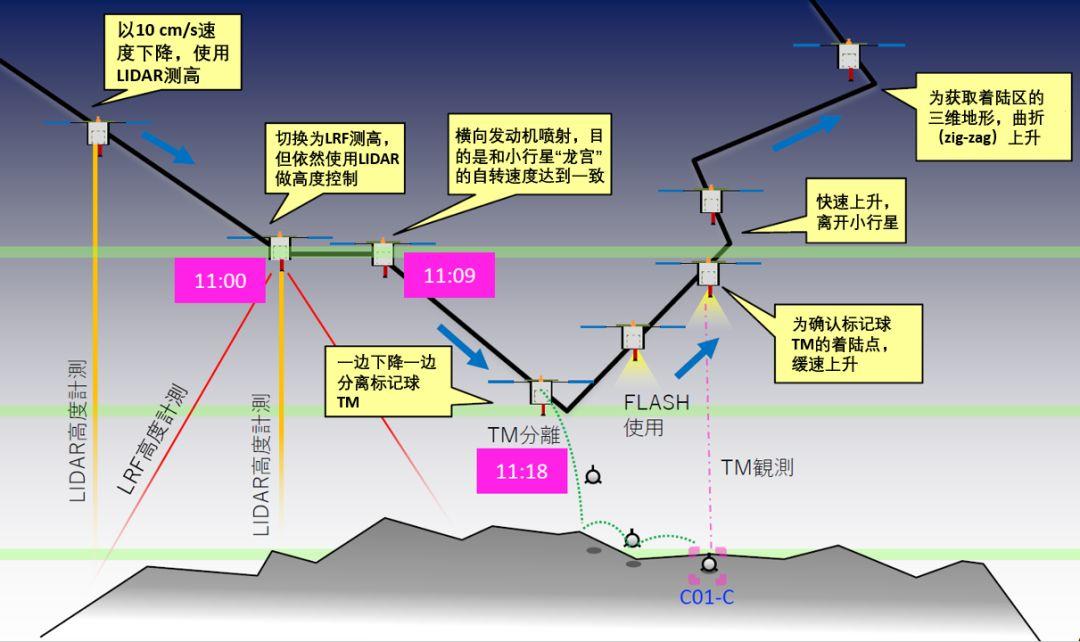
2019年5月30日,隼鸟2号为第二次着陆采样的演习PPTD-1A中丢下标记球的过程,图中时间是日本时间 | JAXA [2]
激光测距在隼鸟2号的两次着陆采样和多次下降观测中立下了汗马功劳,隼鸟2号的第二次着陆采样点甚至只偏离了预定着陆点区中心60厘米!(第一次是差了1米)
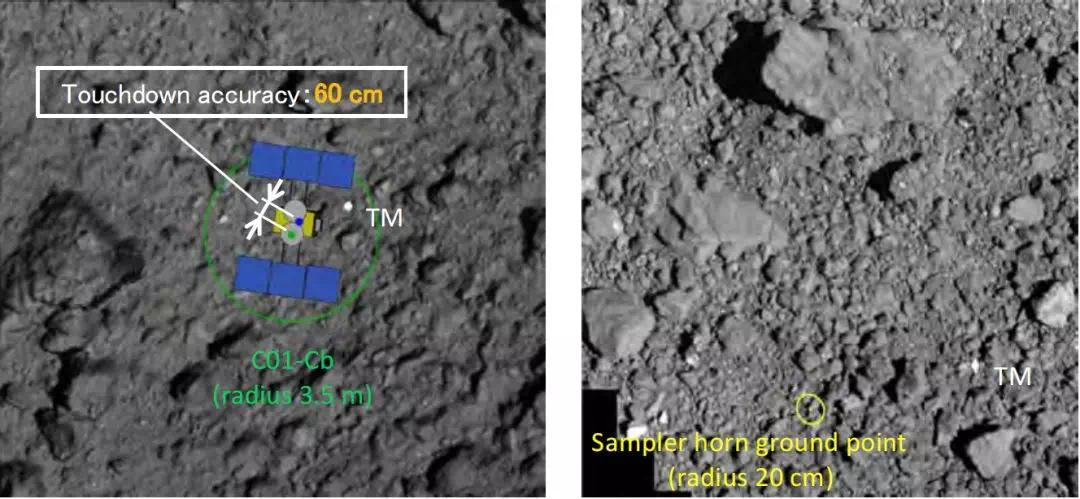
(左)JAXA隼鸟2号第二次着陆点(蓝点)和计划着陆区C01-Cb的中心(绿点)的位置;(右)隼鸟2号采样杆接触点的位置(黄圈)| JAXA [3]
和隼鸟2号的LiDAR类似,NASA的小行星“贝努”采样返回任务OSIRIS-REx(冥王号)携带的激光测高计(OLA)也是LiDAR扫描仪,它帮助冥王号在环绕小行星贝努的一年多时间里,建立了贝努全球的高清三维地形模型。

(左)冥王号的激光测高计(OLA)| 加拿大宇航局 (右)OLA获取的小行星贝努3D地形模型,越红越高,越蓝越低 | NASA/University of Arizona/CSA/York/MDA
冥王号起初也是打算使用LiDAR作为着陆采样阶段的主导航定位技术来着:除了扫描式LiDAR——激光测高计(OLA),冥王号还配备了一台3D快闪LiDAR用于降落过程中的测距和定位。
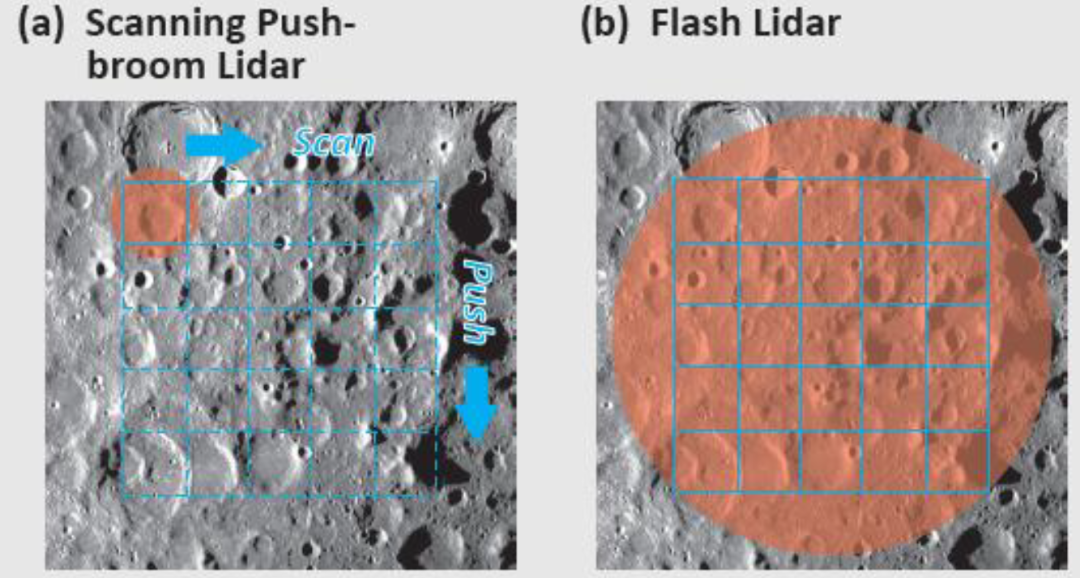
扫描式LiDAR vs 快闪式LiDAR | 参考文献 [4]
冥王号用于辅助降落的快闪LiDAR长这样▼

冥王号的ASC LiDAR | 参考文献 [5]
然而到地儿一看才发现,贝努表面超出预料地崎岖多石,探测器根本没地儿下脚采样杆,冥王号团队不得不把安全着陆区范围从原计划的50米直径缩小到了16米直径。为了落得更准,NASA最终放弃了LiDAR,改用了另一套基于光学影像的备用导航定位方案——自然特征跟踪(Natural Feature Tracking,NFT)技术。冥王号在降落过程中不断实时拍摄着陆区附近的照片,用这些照片和已有的三维地形和影像数据库比对,匹配着陆区一带的特征石块作为地标,就可以更新自己的实时位置和计划采样位置,如果检测到拍摄的影像里有危险障碍物还可以自主撤离。
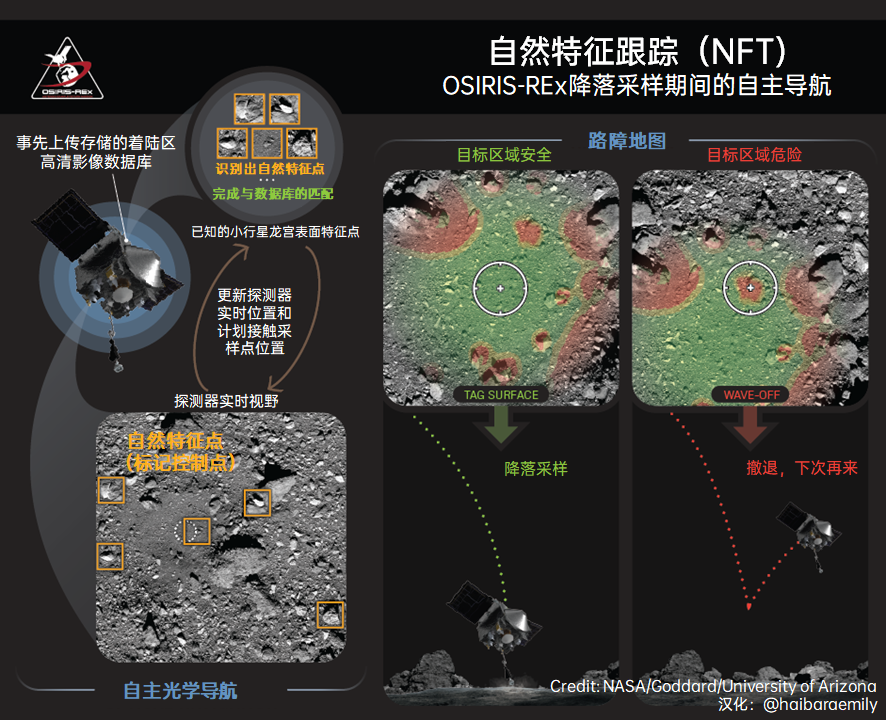
冥王号的自然特征跟踪(NFT)技术 | © NASA/Goddard/University of Arizona [6] 汉化:@haibaraemily
冥王号探测器已经在两次着陆采样演习中验证了NFT技术的可靠性,也将在10月20日的实际着陆采样过程中使用这种技术辅助精确着陆。
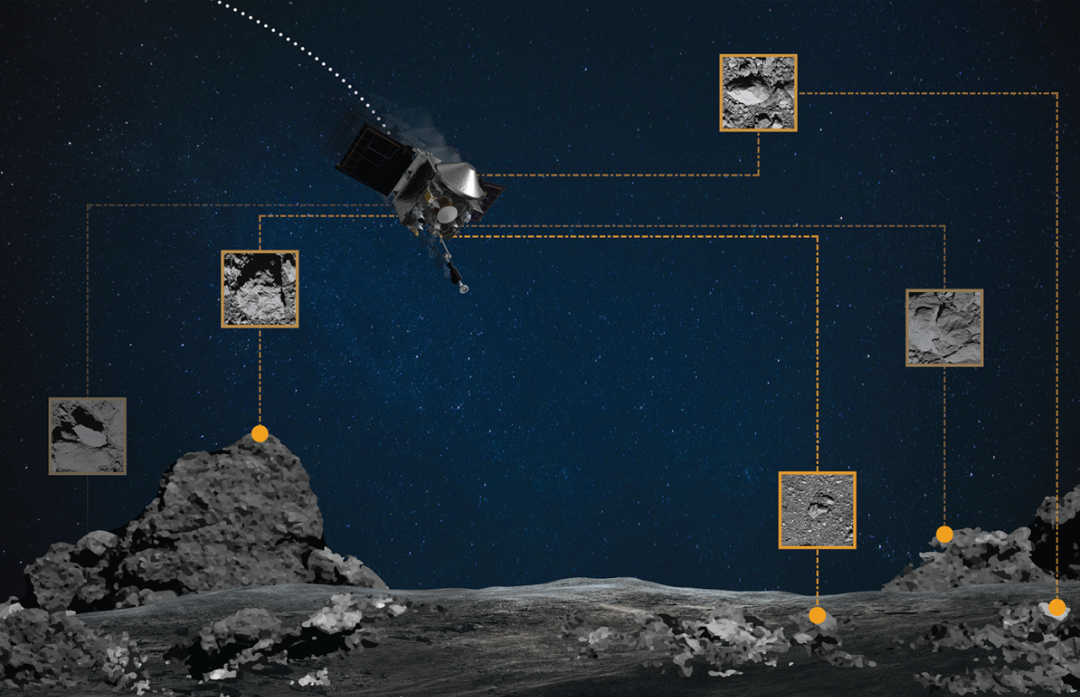
使用自然特征跟踪(NFT)技术下降中的冥王号探测器示意图 | © NASA/Goddard/University of Arizona [7]
毅力号降落过程真的会用LiDAR吗?
那苹果所说的NASA下一个火星任务,正在路上的毅力号火星车呢?无独有偶,为了落得更准更安全,NASA其实也早已决定在毅力号险象环生的“恐怖七分钟”着陆过程里启用基于光学影像的新技术了。
毅力号火星车这次启用的降落导航新技术叫相对地形导航(Terrain Relative Navigation,TRN),本质上和冥王号的自然特征跟踪(Natural Feature Tracking,NFT)技术类似,都是基于探测器降落时实时拍摄的着陆区光学影像匹配数据库,不断更新自己的位置(定位精度优于40米)。这种方法可以帮助探测器避开着陆椭圆内的小尺度障碍,更灵活地选择着陆点。
毅力号基于TRN技术的降落避障过程示意图 | NASA/JPL-Caltech [7]
那毅力号火星车接下来的着陆过程中会不会用到LiDAR呢?我认真查了一下,发现还真说不准…
相对地形导航(TRN)技术的实现,靠的是高精度的地图数据库系统。在毅力号出发之前,NASA就将着陆区一带迄今为止最高清的地形和影像地图输入了毅力号的着陆器视觉系统(Lander Visions System,LVS )中。这套系统将作为毅力号着陆时“脑子”里的火星真实地形地貌参考。

毅力号LVS系统搭载的着陆区一带HiRISE可见光影像(25厘米/像素)和地形(1 米/像素)数据 | NASA
根据目前NASA公开的资料来看,2012年LVS系统概念最初包含三个主要部分:用于识别特征地标的相机、用于近表面障碍识别和整个下降过程中测距的快闪LiDAR,和惯性测量装置(IMU)[8]。
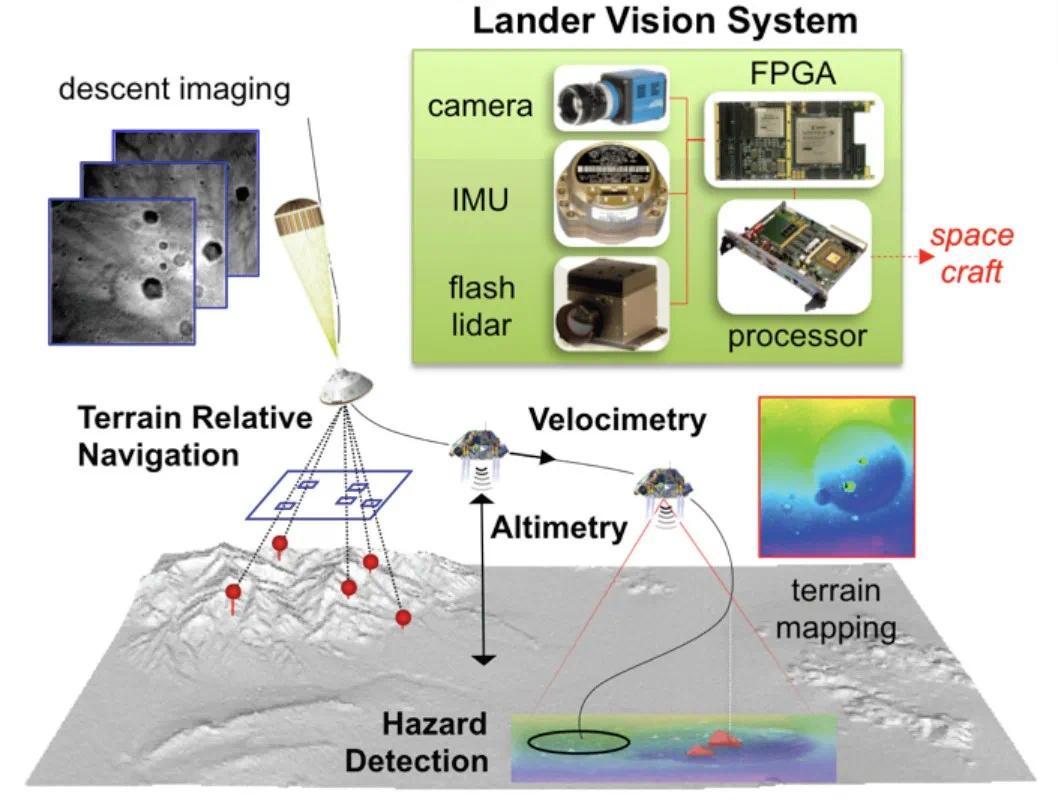
NASA在2012年提出的LVS系统概念 | 参考文献 [8]
按当时的设计,惯导(IMU)、相机(camera)和LiDAR共同作为毅力号的着陆器视觉系统(LVS )的一部分,为相对地形导航(TRN)服务。
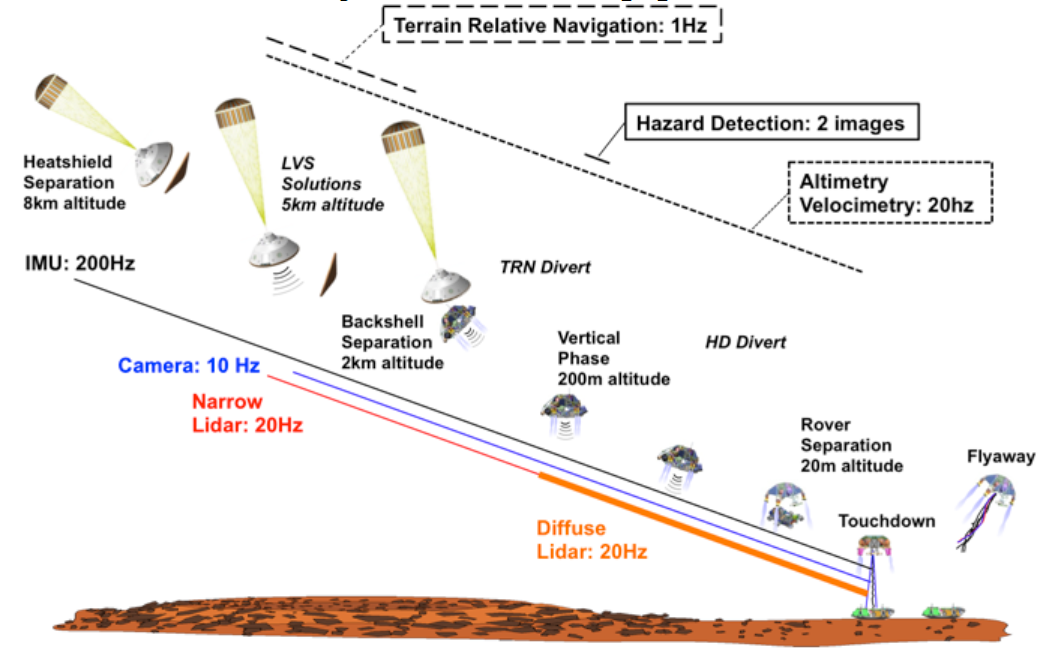
NASA在2012年提出的LVS系统概念 | 参考文献 [8]
然而,到2017年NASA JPL公布的LVS系统设计里,只剩下惯导和相机了,LiDAR似乎没有了 ,至少没有体现[8]。
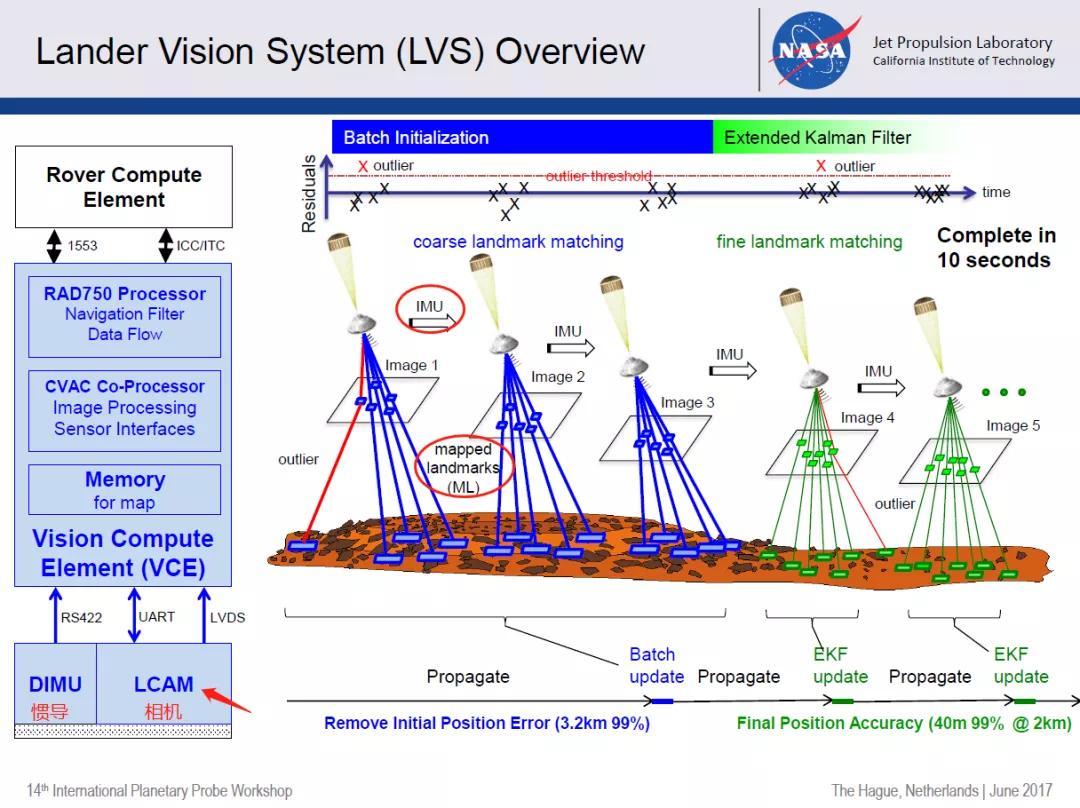
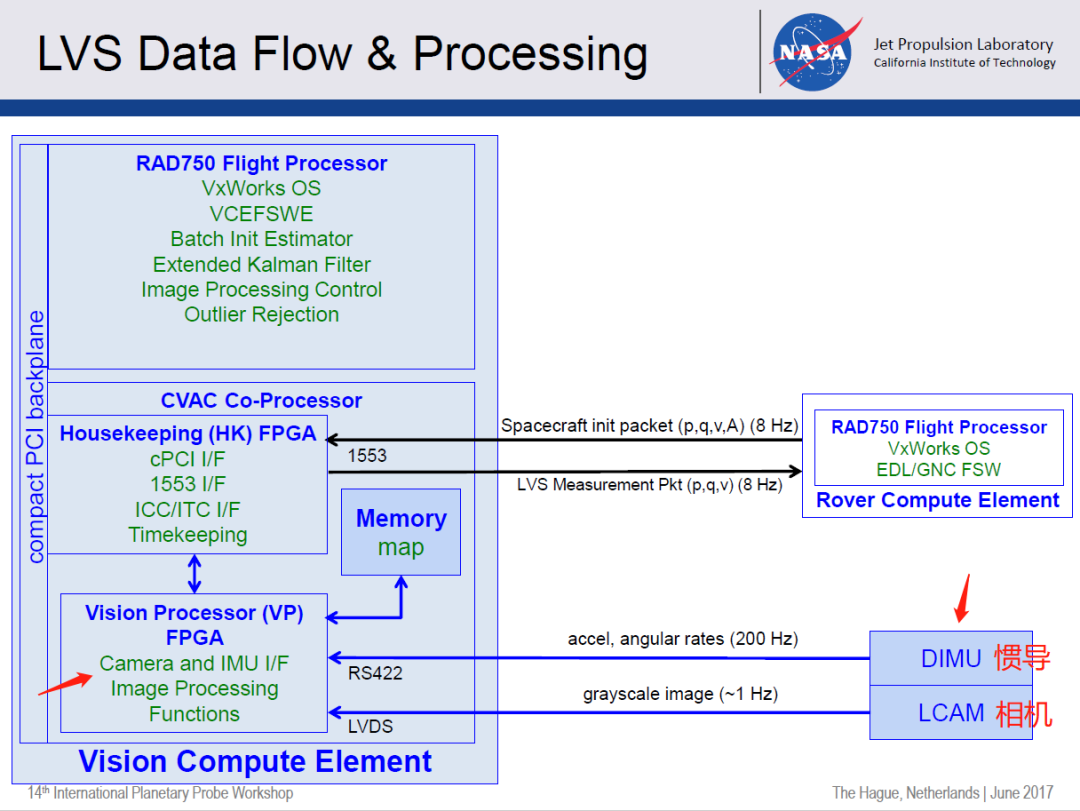
NASA JPL在2017年公布的LVS系统设计 | 参考文献 [9]
NASA JPL在2018年国际行星探测研讨会(IPPW)上明确表示下降过程中的测距部分由好奇号降落时使用的基于雷达测距的终端降落传感器(TDS)系统来完成 [10]。
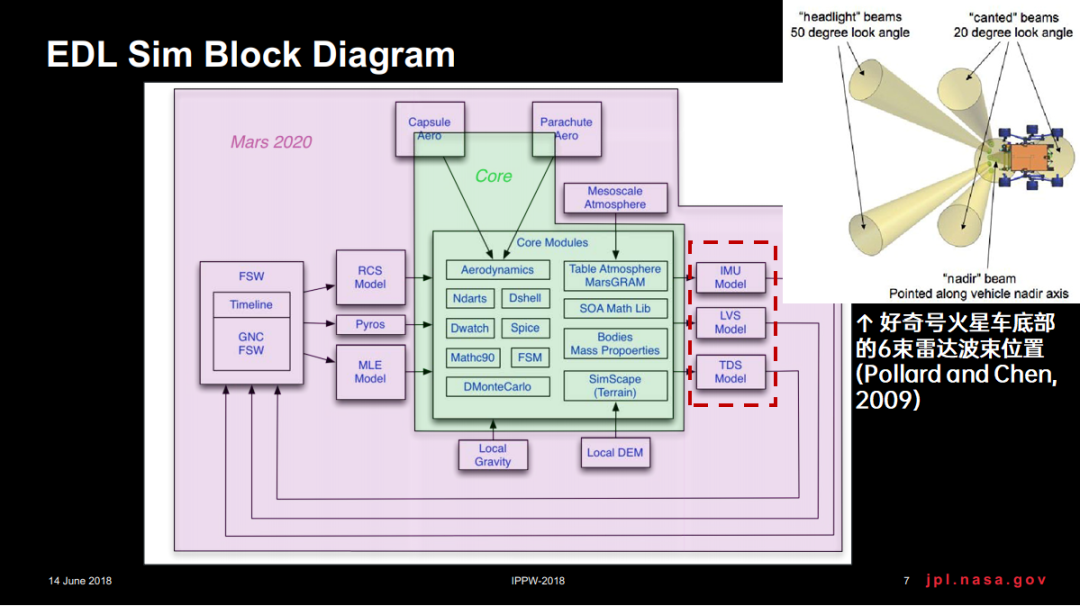
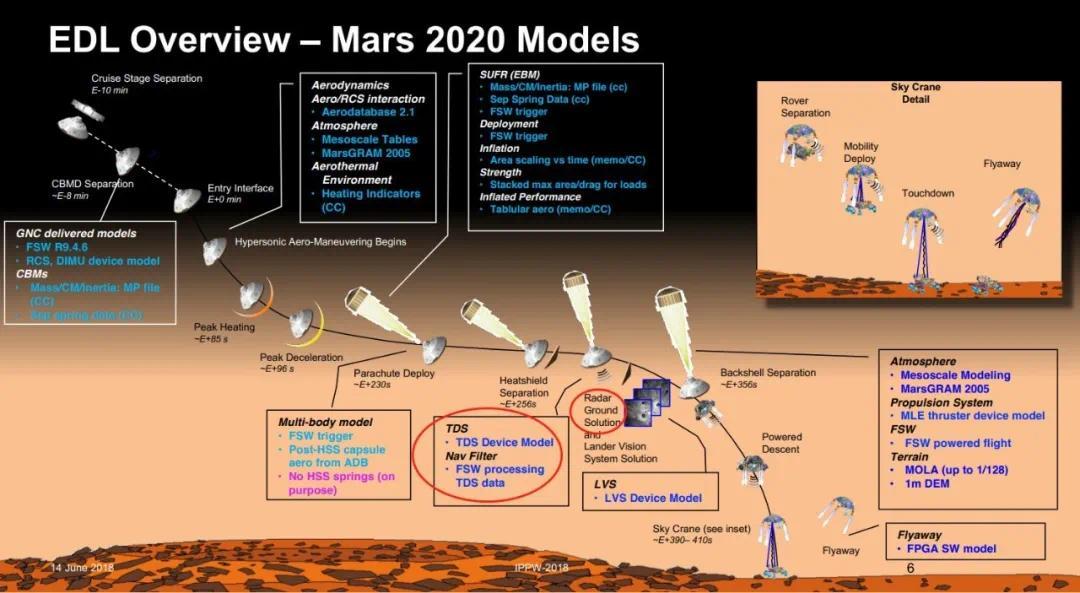
NASA JPL在2018年国际行星探测研讨会(IPPW)上公布的毅力号计划EDL降落方案 | 参考文献 [10]
这也和NASA官网最终公布的毅力号降落过程介绍一致:基于雷达测距的TDS系统结合基于光学影像为主的LVS系统共同为基于相对地形的TRN导航系统提供数据支持 [11]。
也就是说,至少基于目前公布的资料来看,即使毅力号最终确实采用了LiDAR测距系统,也只是作为LVS系统中的一个辅助测距系统,而且似乎也不一定有。
唉,这样算来,其实好像只有隼鸟2号是真正在着陆采样过程中使用了LiDAR为主导航技术呢。
不过,NASA确实正在研发一项基于多普勒LiDAR的高精度集成辅助降落技术(其中也包括TRN),将来或许真的能广泛使用于月球和火星的着陆任务。这个技术有个很长很迷的名字——“安全和精确着陆-综合能力演化”项目,简称SPLICE。接下来的蓝色起源任务以及阿尔忒弥斯任务的一部分商业着陆任务将担当测试SPLICE项目的小白鼠 [12]。
多普勒LiDAR发射激光束示意图 | NASA
但可能苹果还是觉得火星的技术更加高大上吧…(摊手)
致谢
本文感谢Dr. Yuzhen Cai的审稿~
参考文献
[1] Corlies, P., Hayes, A. G., Birch, S. P. D., Lorenz, R., Stiles, B. W., Kirk, R., ... & Iess, L. (2017). Titan's Topography and Shape at the End of the Cassini Mission. Geophysical Research Letters, 44 (23).
[2] http://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press20190611_ver6a.pdf
[3] http://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press20190725_ver9.pdf
[4] Dissly, R., Weimer, C., Masciarelli, J., Weinberg, J., Miller, K., & Rohrschneider, R. (2012, October). Flash lidars for planetary missions. In Workshop on Instrumentation for Planetary Missions.
[5] Bierhaus, E. B., Clark, B. C., Harris, J. W., Payne, K. S., Dubisher, R. D., Wurts, D. W., ... & May, A. J. (2018). The OSIRIS-REx spacecraft and the touch-and-go sample acquisition mechanism (TAGSAM). Space Science Reviews, 214(7), 107.
[6] Bennu’s Boulders Shine as Beacons for NASA’s OSIRIS-REx
https://www.asteroidmission.org/?latest-news=bennus-boulders-shine-as-beacons-for-nasas-osiris-rex
[7] New Technologies for Mars Exploration
https://mars.nasa.gov/mars2020/mission/technology/
[8] Johnson, A. E., & Golombek, M. P. (2012). Lander vision system for safe and precise entry descent and landing. LPICo, 1679, 4341.
[9] The Mars 2020 Lander vision system: architecture and I&T results
https://trs.jpl.nasa.gov/handle/2014/48016
[10] DSENDS Simulation of Mars 2020 Entry, Descent, and Landing
https://www.colorado.edu/event/ippw2018/sites/default/files/attached-files/modsimvalid_3_burkhart_presid558_presslides_docid1000.pdf
[11] Mars 2020 | Entry, Descent, and Landing
https://mars.nasa.gov/mars2020/timeline/landing/entry-descent-landing/
[12] Technology Developed for Lunar Landings Makes Self-Driving Cars Safer on Earth
https://www.nasa.gov/feature/technology-developed-for-lunar-landings-makes-self-driving-cars-safer-on-earth
关于作者

灰原哀博士(haibaraemily),从事行星科学研究,本公众号主页君。更多精彩,欢迎关注公众号~
知乎、微博、果壳、B站:@haibaraemily


