让噪声现出原形的秘密

以下文章来源于LBM与流体力学 ,作者卢比与钢蛋
在武侠的世界里,似乎总有暗器高手能够通过“听声辨位”的高超技术一招制敌,其中最有名的大概就属“飞天蝙蝠”柯镇恶了。而柯大侠最让读者津津乐道的便是那句:“大家等会儿看我的眼色行事”。
虽然我们普通人不能像柯大侠那样“听风辨形”,不过最基本的“循声而去”还是可以做到的,其中的秘诀当然就是我们的两只耳朵和能够进行复杂信号处理的大脑。更加有趣的是,如果我们捂住一只耳朵便很难感知声源的位置。我们今天的主题便是这“听声辨位”的奥妙。

人耳如何辨别声音方位
熟悉噪声测试的朋友都听说过麦克风阵列可用来辨识噪声源的位置和强度,而我们的双耳便是一个由双麦克风组成的天然阵列。
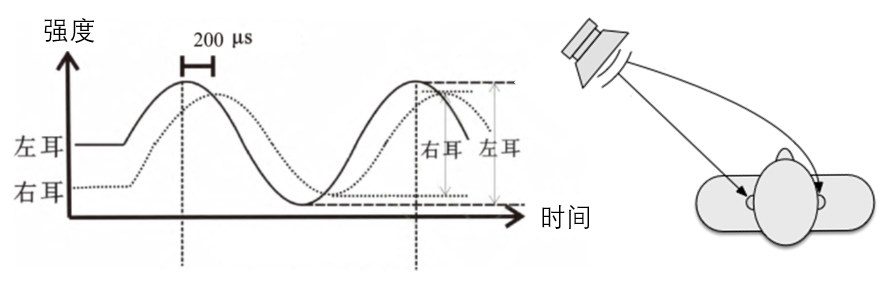
人耳分辨声源位置的原理其实并不复杂,如下图所示,在人的左前方存在一个声源,由于该声源与左右耳的距离不同,因此左右耳在接收声音的时候便会产生时间差和强度差,表现在行波上则是双耳接收到声音信号的相位和幅值不同,人的听觉中枢则会依据此差异来计算声源位置。
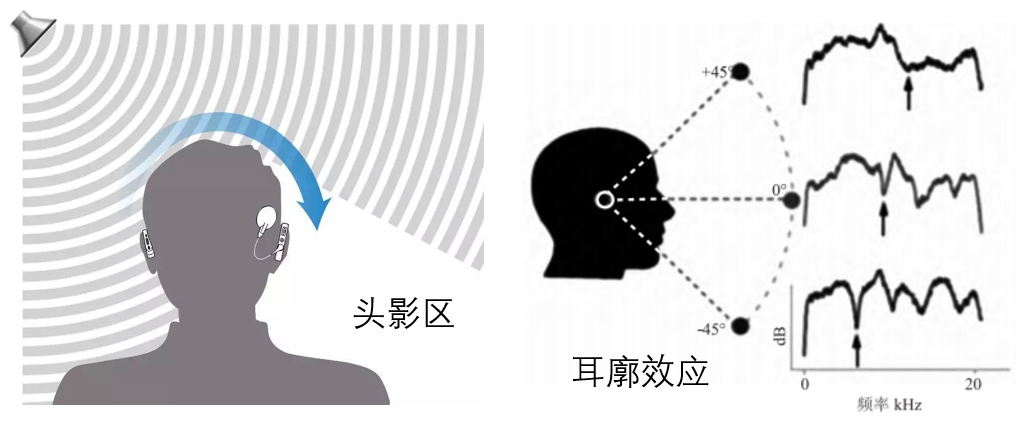
除了相位和幅值的差异之外,人的头颅也会对声音产生阻挡,造成所谓的“头影区”,并且对不同波长的声音产生不一样的阻挡效果,辅助听觉中枢判断声音的来源。同时,人的耳廓形状复杂,对不同方位声源反射的频谱特性也不相同,能够进一步帮助人们感知声音的方位。
看到这儿,小伙伴们或许已经忍不住要表扬一下自己的双耳和大脑是如此的优秀。而另外一群科学家们更是以此为参照发明了“听声辨位”的装置——麦克风阵列。
软件不够,硬件来凑
正如许多仿生学应用一样,虽然我们了解耳朵辨别声音背后的机理以及听觉中枢的工作机制,但对大脑中的信号处理算法,却是一无所知。
历经数百万年的进化,人脑可以在只有双耳这两个声音传感器的简陋条件下,接受信号的同时瞬间完成信息处理并给出结论,甚至在过程中还主动屏蔽背景噪声,即便是最先进的技术也难以望其项背。
软件不够,硬件来凑?既然软实力不行,那就直接使用更多的麦克风吧,于是麦克风阵列便应运而生。麦克风阵列,即将一定数量的声学传感器按某种方式进行排布,对声场的空间特性进行采样并处理的系统。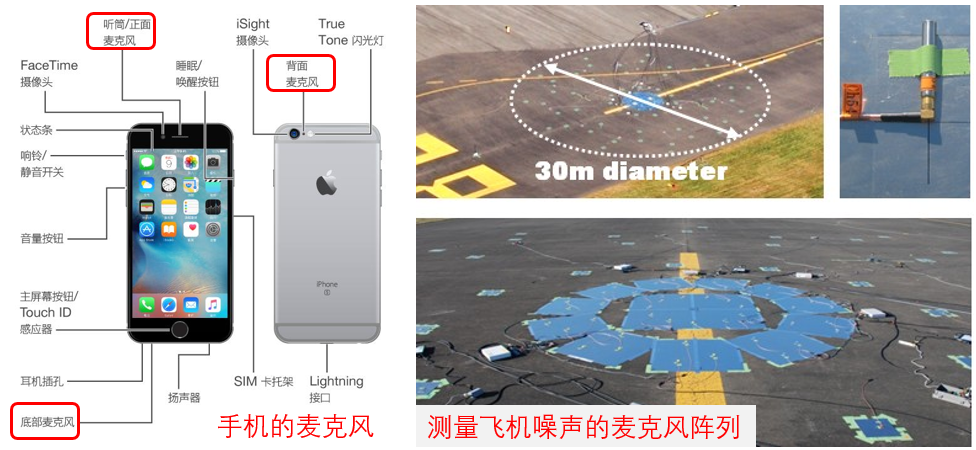
不同功用的麦克风阵列在形态上有很大的差异。手机上常使用若干个麦克风进行环境噪声的消除和语音的增强,而测量飞机噪声的麦克风阵列的数量则会很多,并排布在一个相当大的区域内。世界上最大的麦克风阵列由荷兰的声学技术公司Sorama于2014年搭建,共包含4096个独立的麦克风。
两种信号处理方法
如同人的大脑一样,麦克风阵列采集到的数据当然也要进行处理,否则只是一堆杂乱无章的信号。常用数据分析技术主要有两种,包括近场声全息NAH(Near-field Acoustic Holography)和波束成形BF(Beam-Forming)。
顾名思义,近场声全息适合于近场分析,即麦克风处于声音信号的一个或两个波长范围内,此时的声波在空间中的传播被视为球面波。而波束成形则适合于距离噪声源七个波长之外的远场,此时的声波在空间中近似为平面波。
比如一块石头掉入水中所发出的波纹,如果观察者站在距离石头落水位置很远的地方,波纹看起来不再像圆圈,而是一条直线向观察者运动。对于飞机和汽车噪声等工程问题,麦克风阵列通常无法置于近场并执行近场声全息分析,而更多选用波束成形法。
波束成形分析
波束成形分析的流程如下图所示:首先通过麦克风阵列采集到远场的噪声信息后,选定声源处的某一扫描平面(如车身截面)并构建网格,然后通过波束成形分析将噪声热点信息还原到此平面上,再叠加原始几何图形,便可给出噪声源的分布。由于其直观可视,也被很多人称为“声学照相机”。
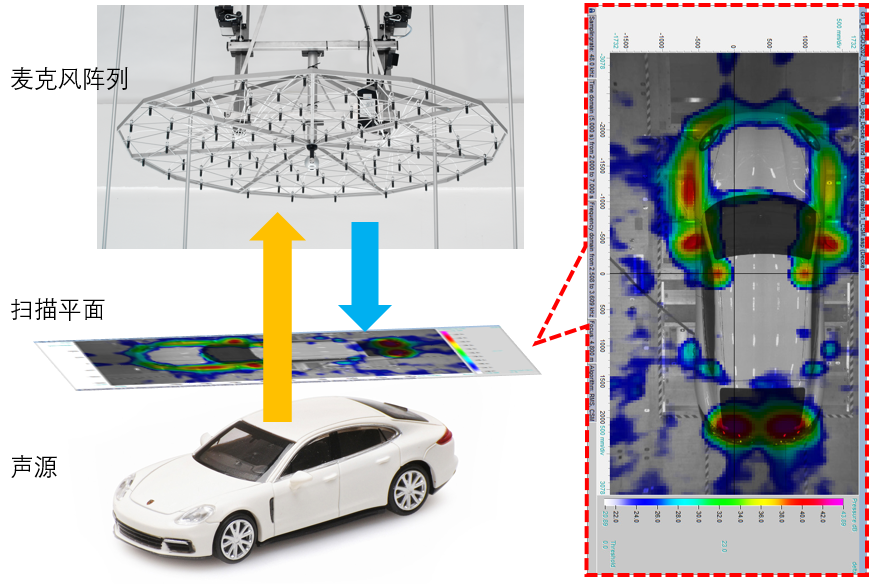
相对于直接测量,上述的波束成形法是一种“反向推导”的办法,获取的结果其实是噪声源在空间传播中到达扫描平面的信息,并非真实的三维噪声源位置。由于扫描平面通常是我们最关心的位置,因此波束成形的结果仍具有较高的工程实用价值。
那么从信号处理的角度去分析,波束成形是如何将麦克风阵列测量得到的信号转化成扫描平面的声源分布呢?如下图所示:首先对所有麦克风记录的声音信号进行频谱转换,获得其频谱特性矩阵P(f),然后进行互谱运算;同时,以扫描平面的每一个网格点作为假想声源,计算麦克风点接收到的声音信号;再将实测结果和假想结果进行匹配度分析,求其自谱,匹配度最高者即为声源位置。

可见,波束成形分析其实是一种各态遍历假设的搜索,即针对扫描平面的所有网格节点,均进行匹配度分析,求得的自谱便是声源图像。
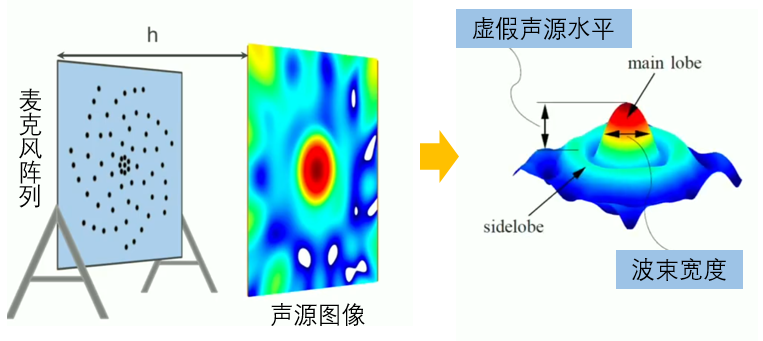
采用上述运算获得的结果也有些不足:由于非正对声源的麦克风也接受到了声音信息,进行运算后会产生虚假声源,增加麦克风数目可有所改进。同时由于麦克风本身分辨能力所限,会使声源区域放大,即波束宽度增加,此时则需要增加麦克风的孔径或灵敏度。
麦克风阵列的排布与校准
波束成形分析也面临一些挑战,由于测试的麦克风数量较多,导致采集的数据量较大,对于数据处理和结果可视化的实时呈现都提出了挑战。因而人们也在寻求更优的麦克风排布方式,以最少的麦克风数量实现最好的声源测定效果。
波束成形的麦克风阵列一般都是圆形的,麦克风的布置方式主要包括以下三种:环形、螺旋和随机分布
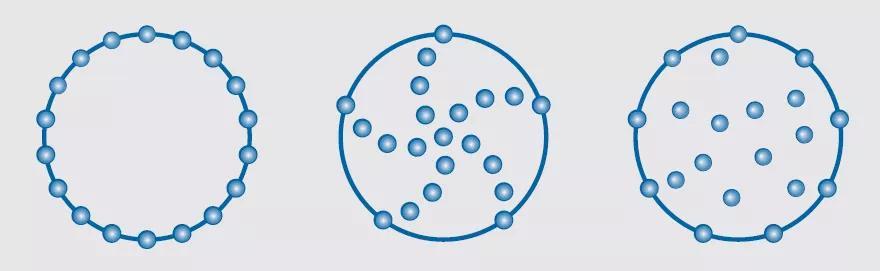
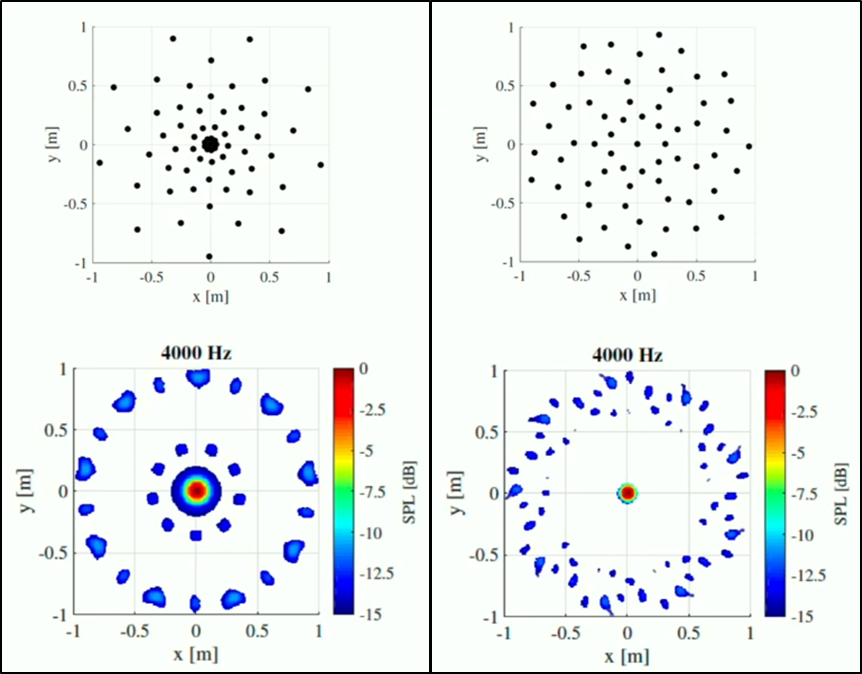
环形阵列适合声源距离未知的情况,但其动态特性可能较差。螺旋阵列可以提供更好的结果。不过对于许多声源相对明确的工程问题,人们更习惯通过将传感器随机放置来获得最佳性能,以提供较高的麦克风场密度和动态测量范围。下图展示了两种麦克风阵列方式及其结果,可见右侧均布的麦克风阵列获取的声源更集中,噪点也更少。
麦克风阵列在使用前也需要校准,但逐个校准阵列中的所有麦克风可能会比较耗时。如果测试的首要目标是确定声源位置,而对麦克风的绝对精度要求不高,可一次校准整个阵列,以节省时间。
CFD后处理的波束成形
实验中可以通过麦克风阵列测试噪声源分布,仿真软件的后处理当然也不甘落后。当气动噪声的计算完成后,只需要将相同的波束成形分析方法施加到仿真中去便可,不过此时要用到我们之前提到的另一个利器,“千里传音功FW-H”。
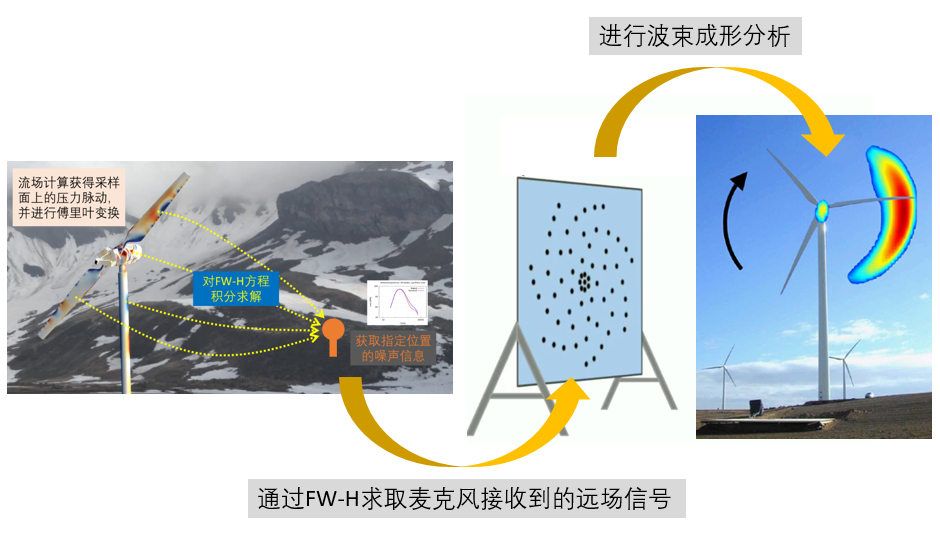
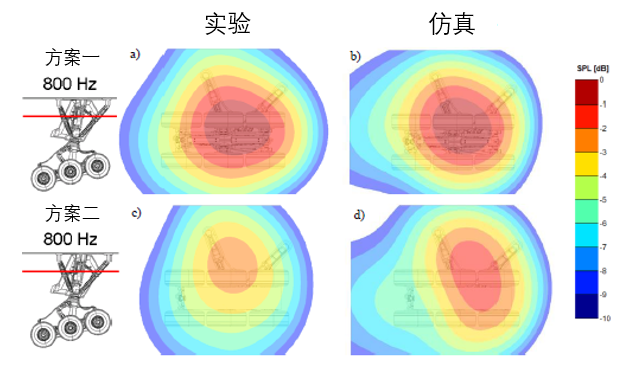
实施步骤如上图所示,首先通过FW-H积分获得麦克风坐标位置处的远场频谱信号,再进行波束成形分析,便可获得噪声热点云图。下图展示了学者们对波音777起落架进行的气动噪声分析的结果,可见实验和仿真得到的起落架上部某平面的声压级云图基本一致。
后记:波束成形的技术诞生至今已经有几十年了,但是由于精度的限制,麦克风阵列在工程领域却常常会沦落到“然并卵”的尴尬境地。就好像《射雕英雄传》里面的柯镇恶,虽然一生刚正不阿,经历无数的打斗,却鲜有胜绩,于是江湖上便调侃他“装逼没输过,打架没赢过”。
不过,笔者还是坚信,随着技术的不断进步,麦克风阵列一定会提供越来越准确的结果,甚至可以帮助人们实时的观察到噪声源的位置。



