北纬41度车队赵凯:赛车悬架运动学性能优化和设计方法
- 作者优秀
- 优秀教师/意见领袖/博士学历/特邀专家/独家讲师
- 平台推荐
- 主编推荐




一、《Race Car Design》悬架几何设计指标
FVSA—正视几何等效摆臂长度,影响双横臂不平行度,越长双横臂约趋近平行,Camber在跳动时变化越小,越短则相反。
侧倾中心—弯道中簧载质量产生的向心力乘以簧载质量到侧倾中心的垂直距离产生侧倾力矩,侧倾中心越接近簧载质量质心转弯时侧倾幅度越小,越远反之;高侧倾中心设计以降低侧倾是可行的,但一方面需注意例如在赛车后悬架设置高侧倾中心且通常其摆臂较短,导致平行轮跳时轮胎横向磨损;悬架侧倾运动时侧倾中心会做平面运动,尤其需要抑制其垂向运动,优化赛车弯道稳定性。(《Race Car Design》3.3)
正视几何设计目标—保持侧倾时Camber控制,根据车身侧倾和轮跳量确定FVSA;抑制侧倾中心变化以保证赛车转弯特性稳定,主要通过改变上下控制臂长度比实现;抑制平行轮跳时轮胎横向磨损,可将侧倾中心设置在地面附近;控制单纯压缩回弹时的Camber变化,可增加FVSA长度或增加上下摆臂长度。(《Race Car Design》3.3)
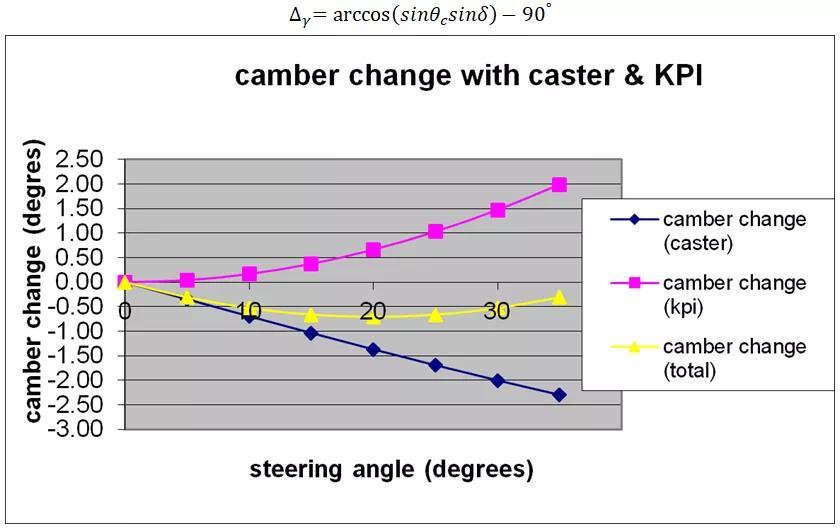
前轴转向时的Camber变化—受主销后倾角影响,随着轮胎转角的增加,弯道外轮有外倾趋势,弯道内轮有内倾趋势,即和主销内倾角跳动趋势相反,故可将主销内倾角和主销后倾角配合设置减小转向时的Camber变化(如图1)。实际Camber随轮胎转角变化规律可由下式表示, 为主销后倾角、 为轮胎转角。(《Race Car Design》6.2.2)
二、考虑轮胎特性的前后悬架几何构型设计
抗侧倾特性强的赛车相应的悬架行程短,可设计更短的FVSA,反之可设计更长的FVSA。可根据悬架位移和侧向G力计算赛车侧倾梯度和轮胎跳动行程,进而设计悬架几何。后悬架通常不作为转向轮,只进行轮跳仿真即可。前悬车轮需绕主销转动,转向时主销定位参数对Camber变化有影响,需进行侧倾转向工况仿真。
基于实车跑动数据确定侧倾梯度
1、将Motec数采系统记录的减震器位移通过下式计算得车身侧倾角(忽略轮胎变形量的值)。

式中, 为左前减震器位移;
为左前减震器位移; 为右前减震器位移;
为右前减震器位移; 为左后减震器位移;
为左后减震器位移; 为右后减震器位移;
为右后减震器位移; 为前悬架传递比;
为前悬架传递比; 为后悬架传递比;
为后悬架传递比; 为前轴轮距;
为前轴轮距; 为后轴轮距。
为后轴轮距。
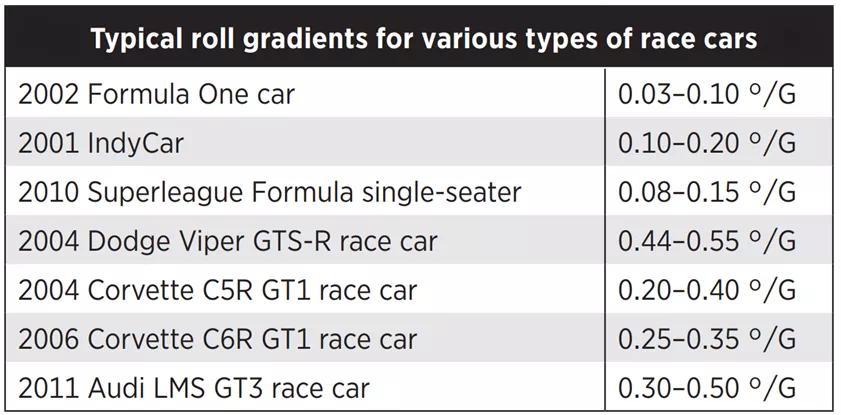
2、绘制车身侧倾角VS侧倾加速度散点图,做线性拟合,得到侧倾梯度,指导调教和设计。《Analysis Techniques for Racecar Data Acquisition》中一些赛车的侧倾梯度如下。
3、查看各减震器跳动行程,根据传递比计算得到轮跳行程。
4、进行悬架几何正视几何设计,主要考虑弯道外轮(内轮一般达不到理想状态,F1具有超大静态Camber,内轮存在偏磨现象,可适当减小静态Camber缩短FVSA),以侧倾时轮胎恰好处在最大侧向力对应Camber为目标,抗侧倾性能突出的赛车可缩短FVSA(悬架不平行度),为抑制侧倾中心变化可通过改变上下控制臂长度比实现。
5、特别的,对于前轮,需进行侧倾转向工况分析Camber变化,上述悬架运动学规律仿真均可通过Adams实现。
三、空间推杆机构设计方法
受布置空间影响,现阶段多数赛车的前悬架为空间推杆机构,其推杆做空间运动,不易用平面草图将其运动规律揭示出来。但是,推杆外点由双横臂机构带动做平面运动,推杆内点由摇臂带动做平面运动,由此二者的运动规律结合特定的设计方法依然可设计出传递比变化范围小的推杆机构,具体步骤如下(适用于多数钢桁架结构赛车):
1、利用投影法将双横臂投影至平行于YZ平面且过推杆外点的平面,截取推杆外点不同轮跳量对应的点。
2、根据车架布置空间确定推杆内点坐标。
3、初步确定摇臂平面,可令其与YZ平面夹角为90°,若设计完成后传递比变化不理想可微调其与YZ平面的夹角。
4、确定推杆内点到摇臂轴线点的长度、推杆内点与摇臂摇臂轴线点连线与推杆轴线的夹角,进而确定摇臂轴线点位置。
5、过摇臂轴线点,以推杆内点到摇臂轴线点的长度为半径做圆弧。
6、利用Catia创成式曲面设计的球面命令,以推杆外点不同轮跳量对应位置为圆心、推杆长度为半径做不完全球面。
7、利用Catia创成式曲面设计的相交命令,将绘制出的球面与第5步绘制的圆弧取交点,即可求得不同轮跳量对应的推杆内点。
8、根据设计传递比,在摇臂平面内约束与布置减震器及摇臂的其他硬点,通过约束不同轮跳量对应的减震器长度确定传递比,直到草图完全变绿。
9、使用Adams校验传递比,修改优化。
四、第三弹簧刚度确定方法
第三弹簧机构可抑制车身纵倾,利于整车下压力在弯道中的保持。第三弹簧可单独增强wheel rate(车轮到轮心的线刚度),进而提高悬架偏频。故知悬架偏频后,便可确定第三弹簧刚度,可用Adams进行平行轮跳仿真,并用其后处理的math功能,输入如下偏频计算公式,以求得悬架偏频进行第三弹簧磅数修正。
式中,
K 为wheel rate(车轮到轮心的线刚度); 为单轴簧载质量。
为单轴簧载质量。